







文章目录
应用场景:需要使用服务通信,但需要及时进行反馈。
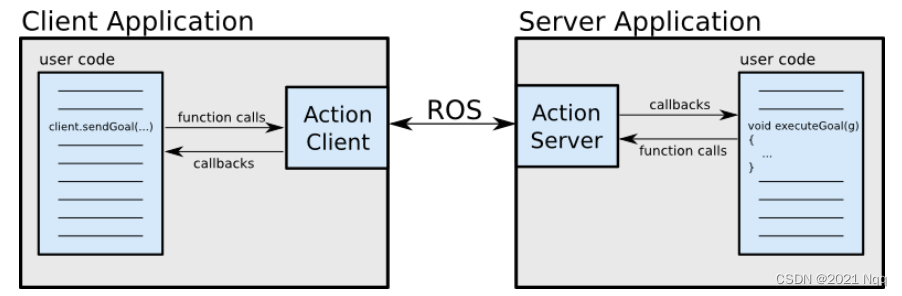
在ROS中提供了actionlib功能包集,用于实现 action 通信。action 是一种类似于服务通信的实现,其实现模型也包含请求和响应,但是不同的是,在请求和响应的过程中,服务端还可以连续的反馈当前任务进度,客户端可以接收连续反馈并且还可以取消任务。
action通信接口
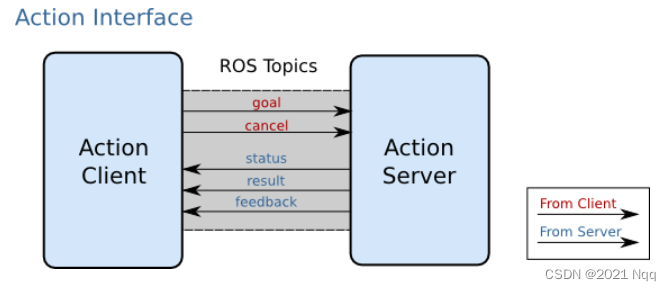
- goal:目标任务
- cacel:取消任务
- status:服务端状态
- result:最终执行结果(只会发布一次)
- feedback:连续反馈(可以发布多次)
自定义action文件(类似msg和service)
服务端 action01_server.cpp
/*
需求:
创建两个ROS节点,服务器和客户端,
客户端可以向服务器发送目标数据N(一个整型数据)
服务器会计算1到N之间所有整数的和,这是一个循环累加的过程,返回给客户端,
这是基于请求响应模式的,
又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,
为了良好的用户体验,需要服务器在计算过程中,
每累加一次,就给客户端响应一次百分比格式的执行进度,使用action实现。
流程:
1.包含头文件;
2.初始化ROS节点;
3.创建 NodeHandle;
4.创建 action 服务对象;
5.处理请求(a. 解析提交的目标值;b. 产生连续反馈;c. 最终结果响应)产生反馈与响应; 回调函数实现
6.spin()回旋
*/
#include"ros/ros.h"
#include"actionlib/server/simple_action_server.h"
#include"demo01_action/AddIntsAction.h"
// 重命名
typedef actionlib::SimpleActionServer<demo01_action::AddIntsAction> Server;
// 5.处理请求(a. 解析提交的目标值;b. 产生连续反馈;c. 最终结果响应)——回调函数实现 客户端提供的goal 和 服务端的server对象
void cb(const demo01_action::AddIntsGoalConstPtr &goalPtr,Server* server){
// a. 解析提交的目标值
int goal_num = goalPtr->num;
ROS_INFO("客户端提交的目标值是:%d",goal_num);
// b. 产生连续反馈 累加
ros::Rate rate(10);// 10Hz
int result = 0;
ROS_INFO("开始连续反馈.....");
for(int i = 1; i <= goal_num; i++)
{
// 累加
result += i;
// 休眠
rate.sleep();
// 产生连续反馈
// void publishFeedback(const demo01_action::AddIntsFeedback &feedback)
demo01_action::AddIntsFeedback fb;
fb.progress_bar = i / (double)goal_num;
server->publishFeedback(fb);
}
ROS_INFO("最终响应结果:%d",result);
// c. 最终结果响应
demo01_action::AddIntsResult r;
r.result = result;
server->setSucceeded(r);
}
int main(int argc, char *argv[])
{
// 2.初始化ROS节点;
setlocale(LC_ALL,"");
ros::init(argc,argv,"addInts_server");// 节点
// 3.创建 NodeHandle;
ros::NodeHandle nh;
// 4.创建 action 服务对象;
/*
SimpleActionServer(ros::NodeHandle n, NodeHandle
std::string name, 话题名称
boost::function<void (const demo01_action::AddIntsGoalConstPtr &)> execute_callback, 回调函数
bool auto_start 是否自动启动
参数1: NodeHandle
参数2: 话题名称
参数3: 回调函数
参数4: 是否自动启动
*/
Server server(nh,"addInts",boost::bind(&cb,_1,&server),false); // 话题,_1是用来占位,传入的是回调函数goal的参数
server.start();// 如果 atuto_start 为false, 那么需要手动调用该函数启动服务
ROS_INFO("服务启动......");
// 6.spin()回旋
ros::spin();
return 0;
}
客户端 action02_client.cpp
#include "ros/ros.h"
// 创建客户端对象
#include "actionlib/client/simple_action_client.h"
#include "demo01_action/AddIntsAction.h"
/*
需求:
创建两个ROS节点,服务器和客户端,
客户端可以向服务器发送目标数据N(一个整型数据)
服务器会计算1到N之间所有整数的和,这是一个循环累加的过程,返回给客户端,
这是基于请求响应模式的,
又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,
为了良好的用户体验,需要服务器在计算过程中,
每累加一次,就给客户端响应一次百分比格式的执行进度,使用action实现。
流程:
1.包含头文件;
2.初始化ROS节点;
3.创建 NodeHandle;
4.创建 action 客户端对象;
5.发送请求
a. 连接建立: --- 回调函数
b. 处理连续反馈:--- 回调函数
c. 处理最终响应:--- 回调函数
6.spin().
*/
typedef actionlib::SimpleActionClient<demo01_action::AddIntsAction> Client;
// 响应成功时的回调,处理最终结果(第3步)状态、结果诉讼诉讼
void done_cb(const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result){
// 响应是否成功
if (state.state_ == state.SUCCEEDED)
{
ROS_INFO("响应成功,最终结果 = %d",result->result);
} else {
ROS_INFO("请求失败!");
}
}
// 激活回调,服务已经激活(第1步)
void active_cb(){
ROS_INFO("客户端与服务端连接建立....");
}
// 连续反馈的回调,处理连续反馈(第2步)
void feedback_cb(const demo01_action::AddIntsFeedbackConstPtr &feedback){
ROS_INFO("当前进度:%.2f",feedback->progress_bar);
}
int main(int argc, char *argv[])
{
// 2.初始化ROS节点
setlocale(LC_ALL,"");
ros::init(argc,argv,"addInts_client");
// 3.创建 NodeHandle
ros::NodeHandle nh;
// 4.创建 action 客户端对象
// SimpleActionClient(ros::NodeHandle & n, const std::string & name, bool spin_thread = true)
actionlib::SimpleActionClient<demo01_action::AddIntsAction> client(nh,"addInts");// 话题
// 5.发送请求
// 注意: 判断服务器状态,等待服务启动
ROS_INFO("等待服务器启动.....");
client.waitForServer();
// a. 连接建立: --- 回调函数
// b. 处理连续反馈:--- 回调函数
// c. 处理最终响应:--- 回调函数
/*
void sendGoal(const demo01_action::AddIntsGoal &goal,
boost::function<void (const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result)> done_cb,处理最终响应
boost::function<void ()> active_cb, 连接建立
boost::function<void (const demo01_action::AddIntsFeedbackConstPtr &feedback)> feedback_cb) 处理反馈
*/
// 参数1: 设置目标值
demo01_action::AddIntsGoal goal;
goal.num = 100;
client.sendGoal(goal,&done_cb,&active_cb,&feedback_cb);
// 6.spin().
ros::spin();
return 0;
}
服务端 action01_server_p.py
#! /usr/bin/env python
"""
需求:
创建两个ROS 节点,服务器和客户端,
客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,
这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,
又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,
为了良好的用户体验,需要服务器在计算过程中,
每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。
流程:
1.导包
2.初始化 ROS 节点
3.单独使用类封装,
4.类中创建 action 服务端对象
5.处理请求(a.解析目标值 b. 发送连续反馈 c. 响应最终结果)--- 回调函数
6.spin()回旋
"""
import rospy
import actionlib
from demo01_action.msg import *
# 4.类中创建 action 服务端对象
# 5.处理请求(a.解析目标值 b. 发送连续反馈 c. 响应最终结果)--- 回调函数
class MyAction:
def __init__(self):
#SimpleActionServer(name, ActionSpec, execute_cb=None, auto_start=True)
self.server = actionlib.SimpleActionServer("addInts",AddIntsAction,self.cb,False)
self.server.start()
rospy.loginfo("服务端启动.....")
# 回调函数
# 参数: 目标值
def cb(self,goal):
# a.解析目标值
goal_num = goal.num
rospy.loginfo("目标值:%d",goal_num)
# b.循环累加,连续反馈
rate = rospy.Rate(10)
sum = 0 # 接受求和结果变量
rospy.loginfo("请求处理中.....")
for i in range(1,goal_num + 1):
# 累加
sum = sum + i
rate.sleep()
# 发送连续反馈
fb_obj = AddIntsFeedback()
fb_obj.progress_bar = i / goal_num
self.server.publish_feedback(fb_obj)
# c.响应最终结果
rospy.loginfo("响应结果:%d",sum)
result = AddIntsResult()
result.result = sum
self.server.set_succeeded(result)
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("action_server_p")
# 3.单独使用类封装
myAction = MyAction()
# 6.spin()回旋
rospy.spin()
客户端 action02_client_p.py
#! /usr/bin/env python
"""
需求:
创建两个ROS 节点,服务器和客户端,
客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,
这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,
又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,
为了良好的用户体验,需要服务器在计算过程中,
每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。
流程:
1.导包
2.初始化 ROS 节点
3.单独使用类封装,
4.类中创建 action 服务端对象
5.处理请求(a.解析目标值 b. 发送连续反馈 c. 响应最终结果)--- 回调函数
6.spin()回旋
"""
import rospy
import actionlib
from demo01_action.msg import *
# 4.类中创建 action 服务端对象
# 5.处理请求(a.解析目标值 b. 发送连续反馈 c. 响应最终结果)--- 回调函数
class MyAction:
def __init__(self):
#SimpleActionServer(name, ActionSpec, execute_cb=None, auto_start=True)
self.server = actionlib.SimpleActionServer("addInts",AddIntsAction,self.cb,False)
self.server.start()
rospy.loginfo("服务端启动.....")
# 回调函数
# 参数: 目标值
def cb(self,goal):
# a.解析目标值
goal_num = goal.num
rospy.loginfo("目标值:%d",goal_num)
# b.循环累加,连续反馈
rate = rospy.Rate(10)
sum = 0 # 接受求和结果变量
rospy.loginfo("请求处理中.....")
for i in range(1,goal_num + 1):
# 累加
sum = sum + i
rate.sleep()
# 发送连续反馈
fb_obj = AddIntsFeedback()
fb_obj.progress_bar = i / goal_num
self.server.publish_feedback(fb_obj)
# c.响应最终结果
rospy.loginfo("响应结果:%d",sum)
result = AddIntsResult()
result.result = sum
self.server.set_succeeded(result)
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("action_server_p")
# 3.单独使用类封装
myAction = MyAction()
# 6.spin()回旋
rospy.spin()

















 917
917











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











