







 本文探讨了RFID技术在无源感知中的应用,介绍了绑定式、非绑定式和混合式感知方法,以及它们面临的挑战和新机遇,如信号特征分析、多标签阵列优化和多模态融合,以提升感知精度和鲁棒性。
本文探讨了RFID技术在无源感知中的应用,介绍了绑定式、非绑定式和混合式感知方法,以及它们面临的挑战和新机遇,如信号特征分析、多标签阵列优化和多模态融合,以提升感知精度和鲁棒性。
文章目录
介绍
马克·维瑟(Mark Weiser)在1991年提出的“Ubiquitous Computing”理念开始,人们一直致力于实现广泛的“人 - 机 - 物”互联,希望以最自然的方式提供服务,对泛在计算环境进行充分感知逐渐成为一项新兴技术,以其特有的感知机理和方法,逐渐成为泛在感知计算领域的核心支撑技术。射频识别(Radio Frequency IDentification)技术的出现为实现“可标记”的无源感知提供了新的基于。RFID系统基于反向散射机制来实现RFID阅读器与标签之间的通信。在反向散射过程中,阅读器天线发射的连续波信号呗RFID标签调制并反射,从而使阅读器有效地识别标签信号。
一方面,RFID标签反向散射的信号非常微弱,极易受到各种环境因素的干扰,包括传输环境中的多径效应、干扰对象的能量吸收等。因此,表征传输环境因素的信息会天然地包含在RFID标签的反向散射信号中。基于这一特性,RFID技术的功能逐渐实现了由“识别”到“感知”的蜕变。
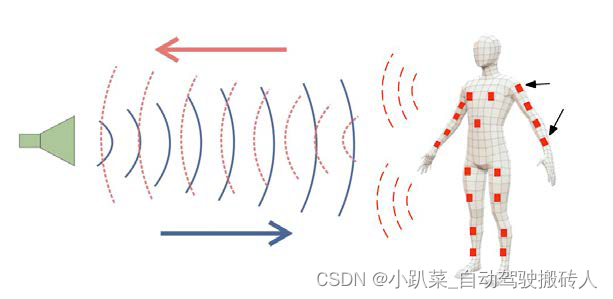
另一方面,RFID的可标识特性能够有效区分反向散射信号的来源,从而保证了无源感知机制的“可标记性”。如下图所示,利用反向散射通信机制的环境敏感特性,RFID系统可给予标签反射信号中携带的环境因素的动态特征对指定对象进行感知。例如肢体行为识别、呼吸及心跳监测等。
问题挑战
对于RFID系统基于反向散射通信的无源感知这种全新感知模型,其中感知机理和方法尚未明确。从感知环境中获取的射频信号所蕴含的各项感知特征(如信号强度、相位变化、多普勒频移等)与不同的感知状态(如空间位置、动作行为、生命体征等)之间的变化关系和敏感程度,还存在更多的探索空间。具体来说,无源感知主要存在以下问题:
1. 跨域感知缺乏理论模型支持:目前缺少一套有效的理论感知模型,来客户多个感知域和射频信号在时间、空间、频率等信号域的潜在关联性,无法通过量化的方式来度量相关特征参量之间的梳理关系。
2. 感知信号易受多种因素干扰:能量吸收、多径反射等真实复杂环境中的动态性、
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











