







PID控制基本内容
对于实际的工程问题,应用最多的控制方法时比例-积分-微分(Proportion Integration Differentiation,PID)控制。基于PID控制理论设计的PID控制器因其结构简单、工作可靠、稳定性好、参数调整便利而成为工业控制的主要工具。当不能精确掌握被控制对象的数学模型和控制参数时,其他控制理论的使用受到较大的局限,需要依靠经验和现场调试来确定控制器结构和控制参数,此时PID控制器是一个有效的解决方案,主要包含以下三个过程:
1. 比例控制
比例控制的输出和输入的误差值成比例关系,但仅有比例控制时,系统的输出一般存在稳态误差。
2. 积分控制
积分控制的输出与输入误差的积分成正比关系。对于一个系统,如果系统在进入稳态后仍然存在一定的稳态误差,就称其为有差系统。为了消除这部分稳态误差,就需要引入“积分项”。对误差求关于时间的积分可知,随着时间的增加,积分项的值会随之增大。因此,即使误差很小,随着时间的增加积分项也会越来越大。积分控制是控制器的输出增大的同时,使稳态误差进一步减小,知道误差完全消除。因此,比例控制和积分控制相结合,可以很快是系统快速进入稳态,并且无稳态误差,一般称为PI控制。
3. 微分控制
微分控制的输入与输出误差值的微分(即误差变化率)成正比关系。控制系统在消除误差的过程中可能会出现频繁振荡甚至失稳现象,其原因是因为系统中存在较大惯性或滞后的环节,使得消除误差环节的变化总是滞后于误差的变化。解决该问题的方法是使消除误差的环节的变化“超前”,也就是在误差接近零时,消除误差的环节已经是零。因此,在控制器中只使用比例控制往往不够的,因为比例项的作用是放大误差的幅值,而这种情况下需要增加的是微分控制,因为他能预测系统误差的变化趋势。
所以,具有比例控制和微分控制的控制器,能够提前使消除误差的控制环节为零,甚至变成负值,从而避免出现被控量严重超调的情况。对于具有较大惯性和滞后特点的控制对象,比例控制和微分控制能改善系统在动态调节过程中的系统特性。综上所述,PID控制就是根据系统的误差,通过比例、积分、微分三个过程计算出控制量,然后输入到被控对象。一般的PID控制的结构如下图所示。
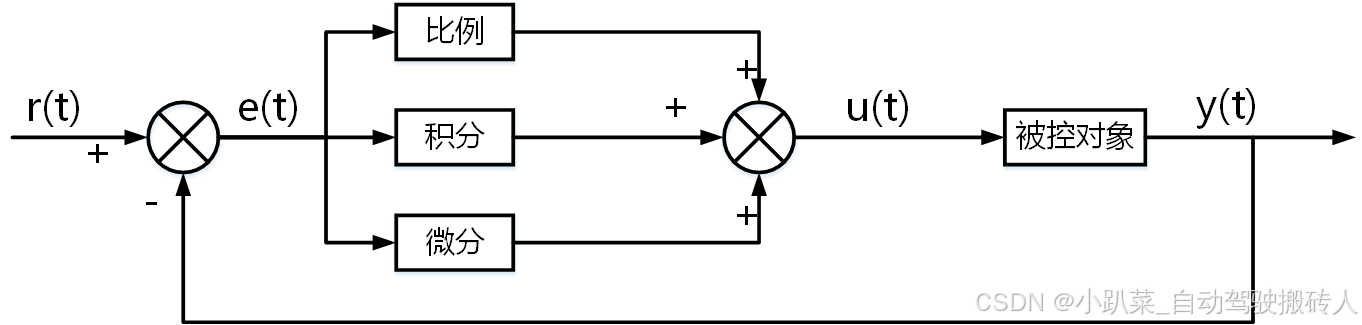
在时域中控制器输出量和输入量之间的关系可以表达为:
u ( t ) = K p [ e ( t ) + T d d e ( t ) d t + 1 T i ∫ e ( t ) d t ] u(t)=K_p[e(t) + T_d\frac{de(t)}{dt} + \frac{1}{T_i}\int e(t)dt] u(t)=Kp
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











