







一、前言
1.最早的DCGAN网络损失函数是采用交叉熵的形式:

但其判别网络的目标函数存在着较大的缺陷。当判别网络能力过强,即能将生成器和真实数据分辨出时,这时候生成图像和真实图像之间没有交叉,两个分布之间的JS散度恒为log2:
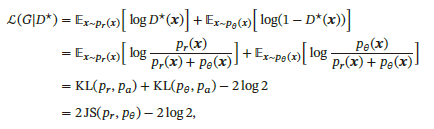

此时对于生成网络来说目标函数关于参数的梯度为0,即出现梯度消失,这时候判别器无法指导生成器向固定方向更新,生成器的生成图像几乎一致,判别器的loss值收敛到0.
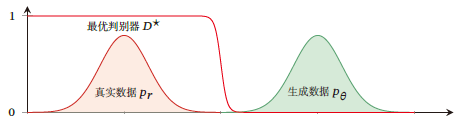
出现梯度消失大概率是由于判别网络太强,强过生成网络,导致真实数据分布与生成数据分布没有重叠。
同时也可能产生另一种情况,就是模型坍塌(model collapse),表现为生成器生成的图像没有任何显示意义,仅仅只是为了拟合判别器,或者生成单一模式的图像。
2.所以为了解决DCGAN出现的问题,出现了wgan:Wasserstein GANs,wgan取消了log函数,采用新的w距离来描述真实和生成数据:

另外采用截断的方式将网络参数截断到[-0.01, 0.01],但这种方法使得神经网络变成了二值网络,如图:

这就降低了整个网络的拟合能力,另外在强行截断的时候,很可能会导致出现梯度爆炸或者梯度消失。
于是乎在后来出现了以wgan为基础的多种算法,大部分都是更改损失函数来缓解出现的梯度消失和模型坍塌的问题,例如wgan-gp,wgan-div等等:

tip:图来自知乎作者 ‘桑龙’
下面将介绍gp以及实现的代码:
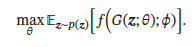
二、wgan-Gp原理
原论文:Improved Training of Wasserstein GANs
https://arxiv.org/pdf/1704.00028.pdf
目标函数:

其中

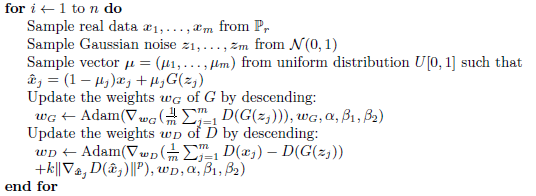
算法过程:

这里,我没有像算法中那样,先将判别器训练5次后再训练生成器,因为这样在我的网络中会让判别器太强,所以一开始设置的就是1:1的训练。
三、wgan-Div原理
原论文:Wasserstein Divergence for GANs
https://arxiv.org/pdf/1712.01026.pdf
目标函数:

对于判别器和生成器而言:

其中k=2,p=6
算法过程:

其网络结构使用了resBlock
参考论文:Deep Residual Learning for Image Recognition
https://arxiv.org/pdf/1512.03385.pdf

残差网络结构主要是针对于梯度消失问题而设计,在图像分类问题上表现非常好。
这里只利用了卷积块,当然也可加上恒等块来加深加宽网络。
四、代码结构设计过程
4.1.生成tfrecord
这种格式的数据对内存友好,读取速度快,同时利于转移、保存;
def create_tfrecords():
if os.path.exists(tfrecords_path):
return 0
if(FLAGS.data == None):
print('the data is none,use: python gan.py --data []')
os._exit(0)
writer_train= tf.python_io.TFRecordWriter(tfrecords_path)
object_path = FLAGS.data
total = os.listdir(object_path)
num = len(total)
num_i = 1
value = 0
print('-----------------------------making dataset tfrecord,waiting--------------------------')
for index in total:
img_path=os.path.join(object_path,index)
img=Image.open(img_path)
img=img.resize((dim,dim))
img_raw=img.tobytes()
'''
it is on my datasets, please change these codes!
'''
example = tf.train.Example(features=tf.train.Features(feature={
'label': tf.train.Feature(int64_list=tf.train.Int64List(value=[value])),
'img_raw': tf.train.Feature(bytes_list=tf.train.BytesList(value=[img_raw]))
}))
writer_train.write(example.SerializeToString()) #序列化为字符串
sys.stdout.write('--------%.4f%%-----'%(num_i/float(num)*100))
sys.stdout.write('\r')
sys.stdout.flush()
num_i = num_i +1
print('-------------------------------datasets has completed-----------------------------------')
global data_num
data_num = num_i
writer_train.close()
4.2.设计残差网络结构
参考博客:Keras入门与残差网络的搭建
搭建resBlock模块
在这里我使用的激活函数时LeakyReLU(),经过验证发现LeakyReLU()的效果相比于relu来说要好一点点。
如下图所示:我们在主通道中设计三个卷积、BN层,对shortcut进行卷积和归一化处理,主通道和shortcut都需要进行维度的改变:对于判别网络来说是下采样,对于生成网络是上采样,利用反卷积(Conv2DTranspose)或者UpSampling2D+Conv2D实现:

定义上采样和下采样的函数:
def convolutional2D(x,num_filters,kernel_size,resampling,strides=2):
if resampling is 'up':
x = keras.layers.UpSampling2D()(x)
x = keras.layers.Conv2D(num_filters, kernel_size=kernel_size, strides=1, padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#x = keras.layers.Conv2DTranspose(num_filters,kernel_size=kernel_size, strides=2, padding='same',
# kernel_initializer=keras.initializers.RandomNormal())(x)
elif resampling is 'down':
x = keras.layers.Conv2D(num_filters, kernel_size=kernel_size, strides=strides, padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
return x
定义resBlock:
def ResBlock(x, num_filters, resampling,strides=2):
#F1,F2,F3 = num_filters
X_shortcut = x
#//up or down
x = convolutional2D(x,num_filters,kernel_size=(3,3),resampling=resampling,strides=strides)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
#x = keras.layers.Activation('relu')(x)
x = keras.layers.LeakyReLU()(x)
#//cov2d
x = keras.layers.Conv2D(num_filters, kernel_size=(3,3), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
#x = keras.layers.Activation('relu')(x)
x = keras.layers.LeakyReLU()(x)
#//cov2d
x = keras.layers.Conv2D(num_filters, kernel_size=(3,3), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN
x = keras.layers.BatchNormalization()(x)
#//add_shortcut
X_shortcut = convolutional2D(X_shortcut,num_filters,kernel_size=(1,1),resampling=resampling,strides=strides)
X_shortcut = keras.layers.BatchNormalization()(X_shortcut)
X_add = keras.layers.Add()([x,X_shortcut])
#X_add = keras.layers.Activation('relu')(X_add)
X_add = keras.layers.LeakyReLU()(X_add)
return X_add
可以注意到的是,在主通道中的卷积核用了3×3尺寸的,而非源论文中1×1:

这样做是因为如果使用1×1的卷积核,在只使用4个ResBlock时的判别器和生成器的参数量仅仅一百多万个,这个数量级是很难让判别器具有很好的拟合能力的,当使用3×3卷积核时,参数量可以提高到一千多万。当然也可以使用IdentifyBlock来加深加宽网络。
原论文wgan-div的结构:

4.3 搭建generate网络:
def generate(resampling='up'):
nosie = keras.layers.Input(shape=(noise_dim,))
g = keras.layers.Dense(512*4*4)(nosie)
g = keras.layers.Reshape((4,4,512))(g)
#//BN_relu
g = keras.layers.BatchNormalization()(g)
#g = keras.layers.Activation('relu')(g)
g = keras.layers.LeakyReLU()(g)
#4*4*512
g = ResBlock(g,num_filters=512,resampling=resampling)
#8*8*512
g = ResBlock(g,num_filters=256,resampling=resampling)
#16*16*256
g = ResBlock(g,num_filters=128,resampling=resampling)
#32*32*128
g = ResBlock(g,num_filters=64,resampling=resampling)
#64*64*64
g = keras.layers.Conv2D(3, kernel_size=(3,3), strides=1, padding='same',
kernel_initializer=keras.initializers.RandomNormal())(g)
#64*64*3
g_out = keras.layers.Activation('tanh')(g)
g_model = keras.Model(nosie,g_out)
return g_model
4.4.搭建discriminator网络:
def discriminator(resampling='down'):
real_in = keras.layers.Input(shape=(dim, dim, 3))
d = keras.layers.Conv2D(64, kernel_size=(3,3), padding='same',strides=1,
kernel_initializer=keras.initializers.RandomNormal())(real_in)
#//BN_relu
d = keras.layers.BatchNormalization()(d)
#d = keras.layers.Activation('relu')(d)
d = keras.layers.LeakyReLU()(d)
#64*64*64
d = ResBlock(d,num_filters=128,resampling=resampling)
#32*32*128
d = ResBlock(d,num_filters=256,resampling=resampling)
#16*16*256
d = ResBlock(d,num_filters=512,resampling=resampling)
#8*8*512
d = ResBlock(d,num_filters=512,resampling=resampling)
#4*4*512
'''
GlobalAveragePooling :it can replace the full connection layer
you can use the Dense to test the network
'''
d = keras.layers.GlobalAveragePooling2D()(d)
d_out = keras.layers.Dense(1,use_bias = False)(d)
d_model = keras.Model(real_in,d_out)
return d_model
4.5.定义网络的损失函数:
a.首先得到判别网络和生成网络:
#------------------------------
#define the generate model *
#------------------------------
generate_model = generate()
#--------------------------------
#define the discriminator model *
#--------------------------------
discriminator_model = discriminator()
b.定义训练判别网络gan_train_d:
方法:
1.定义三个输入(Input):
- 真实图像数据
- 生成数据需要的噪音
- 混合真假数据需要的分布数
2.设置生成模型不可训练:
generate_model.trainable = False
3.利用Input得到:
- D_fake_img
- D_fake_score
- D_real_score
x_ = (1.-u)Dx_real_img+uD_fake_img
wgan-div:
wgan-gp:

看到这里可能有个疑惑,感觉两篇论文的损失函数更新方向是反的。实际上,无论是哪种方法,wgan-div还是wgan-gp,对于判别器和生成器来说,必须要是对抗更新的,生成器要向着生成数据和真实数据之间的distance为0的方向更新,判别器向着distance变大的方向更新,即区分两个数据堆。
#//
#-------------------------------------------------------------------
# train the Discriminator |
#-------------------------------------------------------------------
#//
'''
you need to redefined the Input rather than use the Input previous
'''
#Input para
Dx_real_img = keras.layers.Input(shape=(dim, dim, 3))
Dz_noise = keras.layers.Input(shape=(noise_dim,))
D_uniform = keras.layers.Input(shape=(1,1,1))
#set the trainable
generate_model.trainable = False
#get the score
D_fake_img = generate_model(Dz_noise)
D_fake_score = discriminator_model(D_fake_img)
D_real_score = discriminator_model(Dx_real_img)
#train net
gan_train_d = keras.Model([Dx_real_img, Dz_noise, D_uniform],[D_real_score,D_fake_score])
#set the loss function according to the algorithm
k = 2
p = 6
u = D_uniform
#then, get a new input consist from fake and real
x_ = (1.-u)*Dx_real_img+u*D_fake_img
#//
#-------------------------------------------------------------------
# wgan div loss function |
# arxiv.org/pdf/1712.01026.pdf |
#-------------------------------------------------------------------
#//
if FLAGS.type == 'div':
gradients = K.gradients(discriminator_model(x_), [x_])[0]
grad_norm = K.sqrt(K.sum(gradients ** 2, axis=[1, 2, 3])) ** p
grad_penalty = k * K.mean(grad_norm)
discriminator_loss = K.mean(D_real_score - D_fake_score)
#//
#-------------------------------------------------------------------
# wgan gp loss function |
# arxiv.org/pdf/1704.00028.pdf |
#-------------------------------------------------------------------
#//
if FLAGS.type == 'gp':
gradients = K.gradients(discriminator_model(x_), [x_])[0]
grad_norm = K.sqrt(K.sum(gradients ** 2, axis=[1, 2, 3]))
grad_norm = K.square(1-grad_norm)
grad_penalty = 10*K.mean(grad_norm)
discriminator_loss = K.mean(D_fake_score-D_real_score)
#loss function
discriminator_loss_all = grad_penalty+ discriminator_loss
#compile the model
gan_train_d.add_loss(discriminator_loss_all) #min
gan_train_d.compile(optimizer=keras.optimizers.Adam(learning_rate, 0.5))
gan_train_d.metrics_names.append('DistanceFromRealAndFake')
gan_train_d.metrics_tensors.append(-discriminator_loss) #max
c.定义训练判别网络gan_train_g:
方法:
1.定义一个输入(Input):
- 生成数据需要的噪音
2.设置生成模型不可训练:
discriminator_model.trainable = False
generate_model.trainable = True
3.利用Input得到:
- G_fake_img
- G_fake_score
4.损失函数:
if FLAGS.type == ‘div’:
generate_loss = K.mean(G_fake_score)
if FLAGS.type == ‘gp’:
generate_loss = -K.mean(G_fake_score)#min this value
#//
#-------------------------------------------------------------------
# train the Generator |
#-------------------------------------------------------------------
#//
#Input para
Gz_nosie = keras.layers.Input(shape=(noise_dim,))
#set the trainable
discriminator_model.trainable = False
generate_model.trainable = True
#get the score
G_fake_img = generate_model(Gz_nosie)
G_fake_score = discriminator_model(G_fake_img)
#train net
gan_train_g = keras.Model(Gz_nosie,G_fake_score)
#loss function
if FLAGS.type == 'div':
generate_loss = K.mean(G_fake_score)
if FLAGS.type == 'gp':
generate_loss = -K.mean(G_fake_score)#min this value
#compile the model
gan_train_g.add_loss(generate_loss) #min
gan_train_g.compile(optimizer=keras.optimizers.Adam(learning_rate, 0.5))
4.6.定义训练网络循环体:
循环体内的主体:
首先输入数据,噪音,随机数;然后分别训练discriminator和generator;
#datasets
train_datas_ = sess.run(train_datas)
'''
if the datasets' shape is not batch_size
'''
if train_datas_[0].shape[0] != batch_size:
sess.run(iter.initializer)
train_datas_ = sess.run(train_datas)
z_noise = np.random.normal(size=batch_size*noise_dim)\
.reshape([batch_size,noise_dim])
u_niform = np.random.uniform(low=0.0,high=1.0,size=(batch_size,1,1,1))
#-----------------------------------------
# phase 1 - training the discriminator |
#-----------------------------------------
#\\
for step_critic in range(n_critic):
d_loss,distance = gan_train_d.train_on_batch([train_datas_[0],z_noise,u_niform],None)
#-----------------------------------------
# phase 2 - training the generator |
#-----------------------------------------
#\\
for step_generate in range(n_generate):
g_loss = gan_train_g.train_on_batch(z_noise,None)
4.7.其他函数:
plot()
主要输出损失函数的值变化过程并保存
def plot(history):
history = np.array(history)
plt.ion()
plt.figure(figsize=(12,4))
plt.title('Train History')
plt.plot(history[:,0],history[:,1])
plt.ylabel('loss')
plt.plot(history[:,0],history[:,2])
plt.plot(history[:,0],history[:,3])
plt.xlabel('step')
plt.legend(['d_loss','distance','g_loss'],loc='upper left')
plt.savefig(os.path.join(model_path,'history.png'))
plt.pause(1)
plt.close()
五、代码及训练结果
5.1.运行代码
运行方法:
利用自己准备的数据集可直接运行
不要在乎我的蹩脚英语注释,哈哈
python gan.py --data [image path] --type ['gp' or 'div']
gan.py
#! -*- coding: utf-8 -*-
'''
Designer: zyl
use :
python gan.py --data [image path] --type ['gp' or 'div']
'''
import time
import numpy as np
import tensorflow as tf
import keras
from keras import backend as K
import matplotlib.pyplot as plt
from PIL import Image
import os
import cv2
import sys
noise_dim = 128
dim = 64
epochs = 1000
batch_size = 64
data_num = 12500
learning_rate = 2e-4
save_step = 300
n_critic = 1
n_generate = 1
tfrecords_path = 'data/train.tfrecords'
save_path = 'image/'
model_path = 'model/'
#log_path = 'log/'
tf.app.flags.DEFINE_string(
'data', 'None', 'where the datas?.')
tf.app.flags.DEFINE_string(
'type', 'gp', 'what is the type?.')
FLAGS = tf.app.flags.FLAGS
if not os.path.exists('data'):
os.mkdir('data')
if not os.path.exists('image'):
os.mkdir('image')
if not os.path.exists('data'):
os.mkdir('data')
if not os.path.exists('model'):
os.mkdir('model')
#if not os.path.exists('log'):
# os.mkdir('log')
#-------------------------------------------------------------------
# create the tfrecords |
#-------------------------------------------------------------------
def create_tfrecords():
if os.path.exists(tfrecords_path):
return 0
if(FLAGS.data == None):
print('the data is none,use: python gan.py --data []')
os._exit(0)
writer_train= tf.python_io.TFRecordWriter(tfrecords_path)
object_path = FLAGS.data
total = os.listdir(object_path)
num = len(total)
num_i = 1
value = 0
print('-----------------------------making dataset tfrecord,waiting--------------------------')
for index in total:
img_path=os.path.join(object_path,index)
img=Image.open(img_path)
img=img.resize((dim,dim))
img_raw=img.tobytes()
'''
it is on my datasets, please change these codes!
'''
example = tf.train.Example(features=tf.train.Features(feature={
'label': tf.train.Feature(int64_list=tf.train.Int64List(value=[value])),
'img_raw': tf.train.Feature(bytes_list=tf.train.BytesList(value=[img_raw]))
}))
writer_train.write(example.SerializeToString()) #序列化为字符串
sys.stdout.write('--------%.4f%%-----'%(num_i/float(num)*100))
sys.stdout.write('\r')
sys.stdout.flush()
num_i = num_i +1
print('-------------------------------datasets has completed-----------------------------------')
global data_num
data_num = num_i
writer_train.close()
#-------------------------------------------------------------------
# datatfrecords |
#-------------------------------------------------------------------
def load_image(serialized_example):
features={
'label': tf.io.FixedLenFeature([], tf.int64),
'img_raw' : tf.io.FixedLenFeature([], tf.string)}
parsed_example = tf.io.parse_example(serialized_example,features)
image = tf.decode_raw(parsed_example['img_raw'],tf.uint8)
image = tf.reshape(image,[-1,dim,dim,3])
image = tf.cast(image,tf.float32)*(1./255)
label = tf.cast(parsed_example['label'], tf.int32)
label = tf.reshape(label,[-1,1])
return image,label
def dataset_tfrecords(tfrecords_path,use_keras_fit=True):
#是否使用tf.keras
if use_keras_fit:
epochs_data = 1
else:
epochs_data = epochs
dataset = tf.data.TFRecordDataset([tfrecords_path])
'''
这个可以有多个组成[tfrecords_name1,tfrecords_name2,...],可以用os.listdir(tfrecords_path):
'''
dataset = dataset\
.repeat(epochs_data)\
.shuffle(1000)\
.batch(batch_size)\
.map(load_image,num_parallel_calls = 8)
#注意一定要将shuffle放在batch前
iter = dataset.make_initializable_iterator()#make_one_shot_iterator()
train_datas = iter.get_next() #用train_datas[0],[1]的方式得到值
return train_datas,iter
#-------------------------------------------------------------------
# define resBlock |
#-------------------------------------------------------------------
def convolutional2D(x,num_filters,kernel_size,resampling,strides=2):
if resampling is 'up':
x = keras.layers.UpSampling2D()(x)
x = keras.layers.Conv2D(num_filters, kernel_size=kernel_size, strides=1, padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#x = keras.layers.Conv2DTranspose(num_filters,kernel_size=kernel_size, strides=2, padding='same',
# kernel_initializer=keras.initializers.RandomNormal())(x)
elif resampling is 'down':
x = keras.layers.Conv2D(num_filters, kernel_size=kernel_size, strides=strides, padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
return x
def ResBlock(x, num_filters, resampling,strides=2):
'''
1.如果训练的数据量较少,则需要将BN的参数momentum减少,减少到0.9甚至是0.8(默认0.99)
即 : BatchNormalization(momentum=0.8)
训练数据大时可使用默认值0.99
2.另外也可以使用keras.layers.LeakyReLU()函数来代替relu函数,使得负值段有一定梯度
可以通过设置alpha参数来改变负值段的斜率,alpha=0.2
relu的思想更接近于生物的神经元,卷积后relu处理会将数据映射到正值,负值段梯度为零
'''
#F1,F2,F3 = num_filters
X_shortcut = x
#//up or down
x = convolutional2D(x,num_filters,kernel_size=(3,3),resampling=resampling,strides=strides)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
#x = keras.layers.Activation('relu')(x)
x = keras.layers.LeakyReLU()(x)
#//cov2d
x = keras.layers.Conv2D(num_filters, kernel_size=(3,3), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
#x = keras.layers.Activation('relu')(x)
x = keras.layers.LeakyReLU()(x)
#//cov2d
x = keras.layers.Conv2D(num_filters, kernel_size=(3,3), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
#//add_shortcut
X_shortcut = convolutional2D(X_shortcut,num_filters,kernel_size=(1,1),resampling=resampling,strides=strides)
X_shortcut = keras.layers.BatchNormalization()(X_shortcut)
X_add = keras.layers.Add()([x,X_shortcut])
#X_add = keras.layers.Activation('relu')(X_add)
X_add = keras.layers.LeakyReLU()(X_add)
return X_add
def IdentifyBlock(x, num_filters):
#F1,F2,F3 = num_filters
X_shortcut = x
#//cov2d
x = keras.layers.Conv2D(num_filters//4, kernel_size=(1,1), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
x = keras.layers.Activation('relu')(x)
#//cov2d
x = keras.layers.Conv2D(num_filters//4, kernel_size=(1,1), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
x = keras.layers.Activation('relu')(x)
#//cov2d
x = keras.layers.Conv2D(num_filters, kernel_size=(1,1), strides=1,padding='same',
kernel_initializer=keras.initializers.RandomNormal())(x)
#//BN_relu
x = keras.layers.BatchNormalization()(x)
#//add_shortcut
X_add = keras.layers.Add()([x,X_shortcut])
X_add = keras.layers.Activation('relu')(X_add)
return X_add
#-------------------------------------------------------------------
# define generator |
#-------------------------------------------------------------------
def generate(resampling='up'):
nosie = keras.layers.Input(shape=(noise_dim,))
g = keras.layers.Dense(512*4*4)(nosie)
g = keras.layers.Reshape((4,4,512))(g)
#//BN_relu
g = keras.layers.BatchNormalization()(g)
#g = keras.layers.Activation('relu')(g)
g = keras.layers.LeakyReLU()(g)
#4*4*512
g = ResBlock(g,num_filters=512,resampling=resampling)
#8*8*512
g = ResBlock(g,num_filters=256,resampling=resampling)
#16*16*256
g = ResBlock(g,num_filters=128,resampling=resampling)
#32*32*128
g = ResBlock(g,num_filters=64,resampling=resampling)
#64*64*64
g = keras.layers.Conv2D(3, kernel_size=(3,3), strides=1, padding='same',
kernel_initializer=keras.initializers.RandomNormal())(g)
#64*64*3
g_out = keras.layers.Activation('tanh')(g)
g_model = keras.Model(nosie,g_out)
return g_model
#-------------------------------------------------------------------
# define discriminator |
#-------------------------------------------------------------------
def discriminator(resampling='down'):
real_in = keras.layers.Input(shape=(dim, dim, 3))
d = keras.layers.Conv2D(64, kernel_size=(3,3), padding='same',strides=1,
kernel_initializer=keras.initializers.RandomNormal())(real_in)
#//BN_relu
d = keras.layers.BatchNormalization()(d)
#d = keras.layers.Activation('relu')(d)
d = keras.layers.LeakyReLU()(d)
#64*64*64
d = ResBlock(d,num_filters=128,resampling=resampling)
#32*32*128
d = ResBlock(d,num_filters=256,resampling=resampling)
#16*16*256
d = ResBlock(d,num_filters=512,resampling=resampling)
#8*8*512
d = ResBlock(d,num_filters=512,resampling=resampling)
#4*4*512
'''
GlobalAveragePooling :it can replace the full connection layer
you can use the Dense to test the network
'''
d = keras.layers.GlobalAveragePooling2D()(d)
d_out = keras.layers.Dense(1)(d)
d_model = keras.Model(real_in,d_out)
return d_model
#-------------------------------------------------------------------
# show process of trian |
#-------------------------------------------------------------------
def plot(history):
history = np.array(history)
plt.ion()
plt.figure(figsize=(12,4))
plt.title('Train History')
plt.plot(history[:,0],history[:,1])
plt.ylabel('loss')
plt.plot(history[:,0],history[:,2])
plt.plot(history[:,0],history[:,3])
plt.xlabel('step')
plt.legend(['d_loss','distance','g_loss'],loc='upper left')
plt.savefig(os.path.join(model_path,'history.png'))
plt.pause(1)
plt.close()
def main():
#------------------------------
#define the generate model *
#------------------------------
generate_model = generate()
#--------------------------------
#define the discriminator model *
#--------------------------------
discriminator_model = discriminator()
#cat the network
discriminator_model.summary()
generate_model.summary()
#//
#-------------------------------------------------------------------
# train the Discriminator |
#-------------------------------------------------------------------
#//
'''
you need to redefined the Input rather than use the Input previous
'''
#Input para
Dx_real_img = keras.layers.Input(shape=(dim, dim, 3))
Dz_noise = keras.layers.Input(shape=(noise_dim,))
D_uniform = keras.layers.Input(shape=(1,1,1))
#set the trainable
generate_model.trainable = False
#get the score
D_fake_img = generate_model(Dz_noise)
D_fake_score = discriminator_model(D_fake_img)
D_real_score = discriminator_model(Dx_real_img)
#train net
gan_train_d = keras.Model([Dx_real_img, Dz_noise, D_uniform],[D_real_score,D_fake_score])
#set the loss function according to the algorithm
k = 2
p = 6
u = D_uniform
#then, get a new input consist from fake and real
x_ = (1.-u)*Dx_real_img+u*D_fake_img
#//
#-------------------------------------------------------------------
# wgan div loss function |
# n_critic = 1 |
# arxiv.org/pdf/1712.01026.pdf |
#-------------------------------------------------------------------
#//
if FLAGS.type == 'div':
gradients = K.gradients(discriminator_model(x_), [x_])[0]
grad_norm = K.sqrt(K.sum(gradients ** 2, axis=[1, 2, 3])) ** p
grad_penalty = k * K.mean(grad_norm)
discriminator_loss = K.mean(D_real_score - D_fake_score)
#//
#-------------------------------------------------------------------
# wgan gp loss function |
# n_critic = 5 |
# arxiv.org/pdf/1704.00028.pdf |
#-------------------------------------------------------------------
#//
if FLAGS.type == 'gp':
gradients = K.gradients(discriminator_model(x_), [x_])[0]
grad_norm = K.sqrt(K.sum(gradients ** 2, axis=[1, 2, 3]))
grad_norm = K.square(1-grad_norm)
grad_penalty = 10*K.mean(grad_norm)
discriminator_loss = K.mean(D_fake_score-D_real_score)
#loss function
discriminator_loss_all = grad_penalty+ discriminator_loss
#compile the model
gan_train_d.add_loss(discriminator_loss_all) #min
gan_train_d.compile(optimizer=keras.optimizers.Adam(learning_rate, 0.5))
gan_train_d.metrics_names.append('DistanceFromRealAndFake')
gan_train_d.metrics_tensors.append(-discriminator_loss) #max
#//
#-------------------------------------------------------------------
# train the Generator |
#-------------------------------------------------------------------
#//
#Input para
Gz_nosie = keras.layers.Input(shape=(noise_dim,))
#set the trainable
discriminator_model.trainable = False
generate_model.trainable = True
#get the score
G_fake_img = generate_model(Gz_nosie)
G_fake_score = discriminator_model(G_fake_img)
#train net
gan_train_g = keras.Model(Gz_nosie,G_fake_score)
#loss function
if FLAGS.type == 'div':
generate_loss = K.mean(G_fake_score)
if FLAGS.type == 'gp':
generate_loss = -K.mean(G_fake_score)#min this value
#compile the model
gan_train_g.add_loss(generate_loss) #min
gan_train_g.compile(optimizer=keras.optimizers.Adam(learning_rate, 0.5))
#\\
#---------------------------------------------------------------------
#\\
#cat the network
gan_train_d.summary()
gan_train_g.summary()
#creat the session, get the dataset from tfrecords
sess = tf.Session()
train_datas,iter = dataset_tfrecords(tfrecords_path,use_keras_fit=False)
sess.run(iter.initializer)
print("-----------------------------------------start---------------------------------------")
#continue
if os.path.exists(os.path.join(model_path,'gan.weights')):
gan_train_g.load_weights(os.path.join(model_path,'gan.weights'))
if os.path.exists(os.path.join(model_path,'history.npy')):
history = np.load(os.path.join(model_path,'./history.npy'), allow_pickle=True).tolist()
#read the last data use -1 index,and use 0 to read the first data
#\\
last_iter = int(history[-1][0])
print('Find the npy file, the last save iter:%d' % (last_iter))
else:
history = []
last_iter = -1
else:
print('There is no .npy file, creating a new file---------')
history = []
last_iter = -1
#state the global vars
#you can change them in this function body, so that it makes the training stable
#\\
global n_critic
global n_generate
#the loop body
#\\
for step in range(last_iter+1,int(epochs*data_num/batch_size+1)):
try:
#get the time
start_time = time.time()
#datasets
train_datas_ = sess.run(train_datas)
'''
if the datasets' shape is not batch_size
'''
if train_datas_[0].shape[0] != batch_size:
sess.run(iter.initializer)
train_datas_ = sess.run(train_datas)
z_noise = np.random.normal(size=batch_size*noise_dim)\
.reshape([batch_size,noise_dim])
u_niform = np.random.uniform(low=0.0,high=1.0,size=(batch_size,1,1,1))
#-----------------------------------------
# phase 1 - training the discriminator |
#-----------------------------------------
#\\
for step_critic in range(n_critic):
d_loss,distance = gan_train_d.train_on_batch([train_datas_[0],z_noise,u_niform],None)
#-----------------------------------------
# phase 2 - training the generator |
#-----------------------------------------
#\\
for step_generate in range(n_generate):
g_loss = gan_train_g.train_on_batch(z_noise,None)
#get the time
duration = time.time()-start_time
#-----------------------------------------
# print the loss |
#-----------------------------------------
if step % 5 == 0:
print("The step is %s,d_loss:%s,distance:%s,g_loss:%s, "%(step,d_loss,distance,g_loss),end=' ')
print('%.2f s/step'%(duration))
#-----------------------------------------
# plot the train history |
#-----------------------------------------
#\\
if step % 5 == 0 :
history.append([step, d_loss,distance, g_loss])
#-----------------------------------------
# save the model_weights |
#-----------------------------------------
#\\
if step % save_step == 0 and step != 0:
# save the train steps
np.save(os.path.join(model_path,'./history.npy'), history)
gan_train_g.save_weights(os.path.join(model_path,'gan.weights'))
plot(history)
#-----------------------------------------
# save the image of generate |
#-----------------------------------------
#\\
if step % 50 == 0 and step != 0:
noise_test = np.random.normal(size=[1,noise_dim])
noise_test = np.cast[np.float32](noise_test)
fake_image = generate_model.predict(noise_test,steps=1)
'''
复原图像
1.乘以255后需要映射成uint8的类型
2.也可以保持[0,1]的float32类型,依然可以直接输出
'''
arr_img = np.array([fake_image],np.float32).reshape([dim,dim,3])*255
arr_img = np.cast[np.uint8](arr_img)
#保存为tfrecords用的是PIL.Image,即打开为RGB,所以在用cv显示时需要转换为BGR
arr_img = cv2.cvtColor(arr_img,cv2.COLOR_RGB2BGR)
cv2.imwrite(save_path+str(step)+'.jpg',arr_img)
#cv2.imshow('fake image',arr_img)
#cv2.waitKey(1500)#show the fake image 1.5s
#cv2.destroyAllWindows()
except tf.errors.OutOfRangeError:
sess.run(iter.initializer)
plot(history)
#summary_writer.close()
create_tfrecords()
main()
5.2.使用wgan-Gp生成训练过程(名字表示训练次数):





5.3.使用wgan-div生成训练过程(使用leakyReLU函数):




只训练了三万多次,年轻人我们点到为止。。。
训练过程:(保证distance在0附近)

六、总结
要想训练好GAN网络是一件很困难的事,因为要保证GAN网络的稳定性,不能让生成器太强也不能让判别器太强,现阶段出现的各种方法都主要在解决训练稳定、梯度消失和模型崩溃的问题;实际上,类似于WGAN-GP,WGAN-DIV等修改loss损失函数的方法在我看来相比于调参来说(即超参数,网络结构),其实效果不太大。但对于大部分gan网络来说,我认为需要注意几个问题:
1.gan网络中需要让判别器占据主导地位,稍强于生成网络;
2.训练的次数和batch_size同样影响着生成器最终的效果;
3.两者的学习率不一定要相等,相等的学习率不一定就能让生成网络和判别网络同步稳定进行更新,必要时可以尝试设置不同的学习率;
4.优化目标函数最终的目的是让生成数据和真实数据之间的’距离’(这个距离是广义笼统的距离)无限逼近0,我在代码中也设置了这个观测值,可以实时观察动向,如果distance越来越远离0,则表示判别网络discriminator太强,或者生成器网络能力不够等,这个时候就需要调节参数重新训练;
5.一般来说,判别网络更容易训练,生成网络则比较难调整;所以有的时候比如DCGAN网络就容易出现判别网络的损失函数的值先到达0并且一直为0的情况,这时候可以减小判别网络的学习率,减少判别网络结构等方法来调整;
6.梯度消失问题,可以利用基于wgan的参考算法来实现,利用ResNet网络以及使用LeakyReLU激活函数等;
7.利用keras搭建的网络模型可以观测到搭建网络的参数量,比如一般来说64×64图像的需要百万级别以上的参数量;一般而言,参数量越大,网络结构越深,拟合能力越强,所以对于具有相似结构的判别和生成网络,判别网络的参数量应该稍多于生成网络;
8.数据集也会影响训练效果;数据集之间也会存在着不同的特征差异,如果数据集内间‘特征距离’较小,整个数据集间的特征重合度高(例如人脸数据),那么训练的生成器的效果将会更好;相反,如果数据集内间‘特征距离’较大,那么对于判别网络来说都是巨大的挑战,因为数据集相对分散,生成网络生成的图像有时候不尽人意…可以在设计判别网络的时候考虑数据集的差异性分布,适当加深加宽网络,增强判别网络的能力;
9.多看论文!GAN网络的研究到现在已经出现了很大的进步;我们研究生深度学习的授课老师来自智能与计算学部,主要方向是GAN网络和计算机视觉,老师也讲了很多他本人在GAN网络领域上的重大进展(确实是大牛,毕竟他和他的学生是和杨立昆(Yann LeCun)合过影的,哈哈!!);GAN网络的研究目前还是非常火热的,经过几年的发展,GAN网络出现了很多种结构和算法,取得了不错的成就,这个方向我认为可以深入发展,我自己的方向就是医疗手术机器人,所以比如可以应用在医疗图像等领域,生成融合分割等等…
学渣一枚,个人总结仅供参考。
参考代码和文献:
https://github.com/ABaoccy/wgan-div/blob/master/wgan_div.py
https://github.com/igul222/improved_wgan_training/blob/master/gan_64x64.py
https://github.com/bojone/gan/blob/master/keras/wgan_div_celeba.py
https://github.com/eriklindernoren/Keras-GAN/blob/master/wgan/wgan.py
1.Deep Residual Learning for Image Recognition
2.Wasserstein Divergence for GANs
3.Wasserstein GAN
4.Improved Training of Wasserstein GANs
5.深度残差收缩网络 Deep Residual Shrinkage Networks for Fault Diagnosis














 1701
1701











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









