







 超级会员免费看
超级会员免费看
 本文探讨了在栅格地图中,如何处理障碍物栅格处的路径约束,以避免移动体与障碍物发生碰撞。通过在八方向移动方式中加入约束条件,当遇到障碍物时,禁止对角移动,修改邻接矩阵,将对角栅格设为不可达。文章提供了MATLAB代码示例,展示Dijkstra算法在处理这一问题中的应用。
本文探讨了在栅格地图中,如何处理障碍物栅格处的路径约束,以避免移动体与障碍物发生碰撞。通过在八方向移动方式中加入约束条件,当遇到障碍物时,禁止对角移动,修改邻接矩阵,将对角栅格设为不可达。文章提供了MATLAB代码示例,展示Dijkstra算法在处理这一问题中的应用。
欢迎来到 < Haoh-Smile > 的博客,觉得受用客官就点个赞评论一下呗!
栅格地图中障碍栅格处路径约束
移动体栅格环境中多采用八方向的移动方式,此移动方式在完全可通行区域不存在运行安全问题,当移动体周围存在障碍栅格时此移动方式可能会发生与障碍物栅格的碰撞问题,为解决此问题加入约束条件,当在分别与障碍物栅格水平方向和垂直方向的可行栅格两栅格之间通行时,禁止移动体采用对角式移动方式。

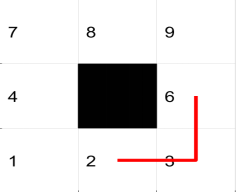
约束条件的加入,实质是改变栅格地图的邻接矩阵,将障碍栅格(数字为“1”的矩阵元素)的对角栅格设为不可达,即将对角栅格的距离值改为无穷大。其实现MATLAB代码如下:
%约束移动体在障碍栅格对角运动
%通过优化邻接矩阵实现
%%%%%%%%%%%%%%%%%% 约束移动体移动方式 %%%%%%%%%%%%%%%%%

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 238
238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











