






1 概述
无人机作为一种现代航空设备,不仅作业速度快,成本低,还具有卓越的灵活性和时效性.常用于完成那些繁冗、危险、对灵活性要求较高、作业范围较大的任务,比如航空拍摄、农药喷洒、边防检查、电力检测、防汛扛旱等领域.随着技术的发展,将无人机独特的优势和不同的行业技术相结合,可以应用到不同的行业.比如,无人机搭载成像传感器,可以组成一种可以捕获目标图像的新型监视设备2'.目前,许多国家都在积极拓展无人机与工业应用相结合的技术,因此无人机应用的研究一直备受关注.
基于智能优化算法的无人机路径规划研究是一个非常前沿和活跃的研究领域,它旨在通过高效、自主的方式为无人机(UAV)设计最优飞行路径。这不仅能够提高任务执行效率,还能确保飞行安全,节省能源消耗,并在复杂的环境条件下做出快速决策。以下是一些关键点概述:
1.1 智能优化算法简介
智能优化算法是一类受到自然界启发的计算方法,用于解决复杂优化问题。常见的智能优化算法包括:
遗传算法(Genetic Algorithm, GA):模拟自然选择和遗传机制来寻找最优解。
粒子群优化(Particle Swarm Optimization, PSO):模仿鸟群觅食行为,通过个体之间的信息交流找到最优解。
蚁群算法(Ant Colony Optimization, ACO):基于蚂蚁寻找食物时的信息素轨迹来优化路径。
模拟退火算法(Simulated Annealing, SA):借鉴金属冷却过程中的微观结构变化原理,以一定概率接受非最优解以跳出局部最优。
遗传编程(Genetic Programming, GP)和进化策略(Evolutionary Strategies, ES)等。
1.2 无人机路径规划的挑战
无人机路径规划面临多重挑战,包括但不限于:
动态环境:需适应不断变化的环境(如风向、障碍物移动)。
多约束条件:飞行时间、能量消耗、飞行高度限制等。
多目标优化:通常需要平衡飞行距离、时间、安全性等多个目标。
实时性要求:需要快速计算出可行路径以应对紧急情况。
1.3 研究方法与应用
研究方法
混合优化算法:结合两种或多种智能优化算法的优势,如GA与PSO的融合,以提高搜索效率和准确性。
多智能体系统(Multi-Agent Systems, MAS):多个无人机间协同规划,实现复杂任务分配和路径优化。
环境自适应算法:根据环境变化自动调整优化策略,提高适应性和鲁棒性。
深度学习与强化学习:利用神经网络预测环境变化,通过强化学习指导策略迭代优化。
应用领域
搜救行动:快速规划最短救援路径,同时考虑地形、气候因素。
农业监测:高效覆盖农田进行病虫害检测或作物健康评估。
物流配送:城市或偏远地区的无人货物运输,路径规划需考虑效率与成本。
灾害评估:地震、洪水等灾害后的快速评估,避开危险区域规划安全路径。
军事侦察:自动规划隐蔽且高效的侦察路径,减少被发现风险。
1.4 未来发展趋势
集成学习与数据驱动方法:利用大量飞行数据训练模型,使路径规划更加精确和智能化。
跨学科融合:与计算机视觉、机器学习、云计算等技术的深入融合,提升路径规划的自主性和智能化水平。
伦理与法律考量:随着无人机应用的普及,还需关注隐私保护、空域管理法规等问题,确保路径规划合法合规。
综上所述,基于智能优化算法的无人机路径规划研究正持续推动着无人机技术的进步,其在未来智能交通、环境保护、应急响应等领域具有广阔的应用前景。
部分代码:
function [fit,result,x0]=aimFcn_1(x,option,data)x0=x;%%x=reshape(x,data.mapSize0);%%S=data.S0;E=data.E0;flag=x*0;path=S;map=data.map;while sum(S==E)~=3% 可移动点nextN=repmat(S,length(data.direction(:,1)),1)+data.direction;% 剔除超界点flag=nextN(:,1)*0;for i=1:length(nextN(:,1))for j=1:3if nextN(i,j)<=0 ||nextN(i,j)>data.mapSize0(j)flag(i)=1;endendendposition=find(flag==1);nextN(position,:)=[];% 剔除不可移动点flag=nextN(:,1)*0;for i=1:length(nextN(:,1))no1=nextN(i,1);no2=nextN(i,2);no3=nextN(i,3);if map(no1,no2,no3)==1flag(i)=1;endendposition=find(flag==1);nextN(position,:)=[];if isempty(nextN)S=path(end-1,:);path(end,:)=[];continue;end%D1=nextN(:,1)*0;D2=nextN(:,1)*0;pri=nextN(:,1)*0;for i=1:length(nextN(:,1))no1=nextN(i,1);no2=nextN(i,2);no3=nextN(i,3);D1(i)=norm(nextN(i,:)-S);D2(i)=norm(nextN(i,:)-E);pri(i)=x(no1,no2,no3);end[~,no]=min((D1+D2).*pri.^0.5);path=[path;nextN(no,:)];S=nextN(no,:);map(S(1),S(2),S(3))=1;endD=0;for i=1:length(path(:,1))-1D=D+norm(path(i,:)-path(i+1,:));endfit=D;if nargout>1result.fit=fit; %总目标result.path=path;endendfunction [fit,result,x0]=aimFcn_1(x,option,data)x0=x;%%x=reshape(x,data.mapSize0);%%S=data.S0;E=data.E0;flag=x*0;path=S;map=data.map;while sum(S==E)~=3% 可移动点nextN=repmat(S,length(data.direction(:,1)),1)+data.direction;% 剔除超界点flag=nextN(:,1)*0;for i=1:length(nextN(:,1))for j=1:3if nextN(i,j)<=0 ||nextN(i,j)>data.mapSize0(j)flag(i)=1;endendendposition=find(flag==1);nextN(position,:)=[];% 剔除不可移动点flag=nextN(:,1)*0;for i=1:length(nextN(:,1))no1=nextN(i,1);no2=nextN(i,2);no3=nextN(i,3);if map(no1,no2,no3)==1flag(i)=1;endendposition=find(flag==1);nextN(position,:)=[];if isempty(nextN)S=path(end-1,:);path(end,:)=[];continue;end%D1=nextN(:,1)*0;D2=nextN(:,1)*0;pri=nextN(:,1)*0;for i=1:length(nextN(:,1))no1=nextN(i,1);no2=nextN(i,2);no3=nextN(i,3);D1(i)=norm(nextN(i,:)-S);D2(i)=norm(nextN(i,:)-E);pri(i)=x(no1,no2,no3);end[~,no]=min((D1+D2).*pri.^0.5);path=[path;nextN(no,:)];S=nextN(no,:);map(S(1),S(2),S(3))=1;endD=0;for i=1:length(path(:,1))-1D=D+norm(path(i,:)-path(i+1,:));endfit=D;if nargout>1result.fit=fit; %总目标result.path=path;endend
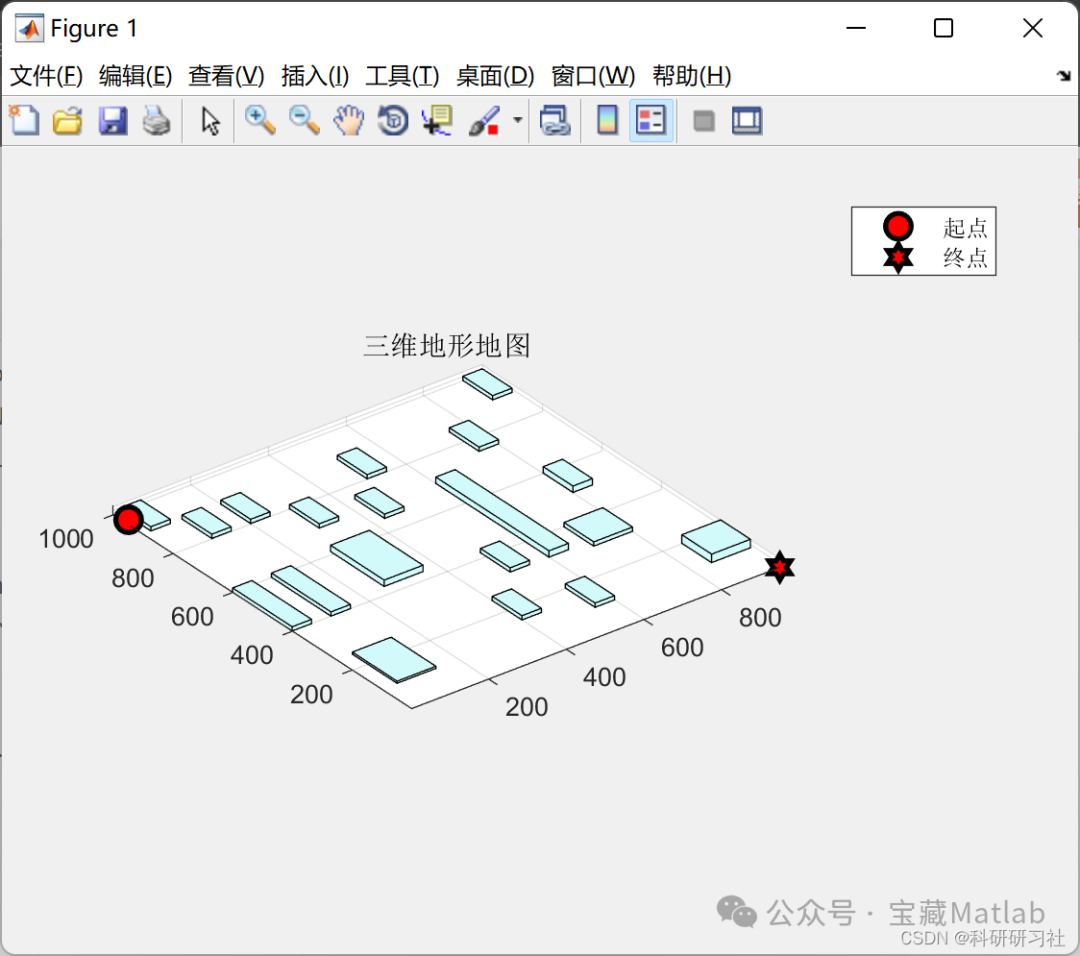
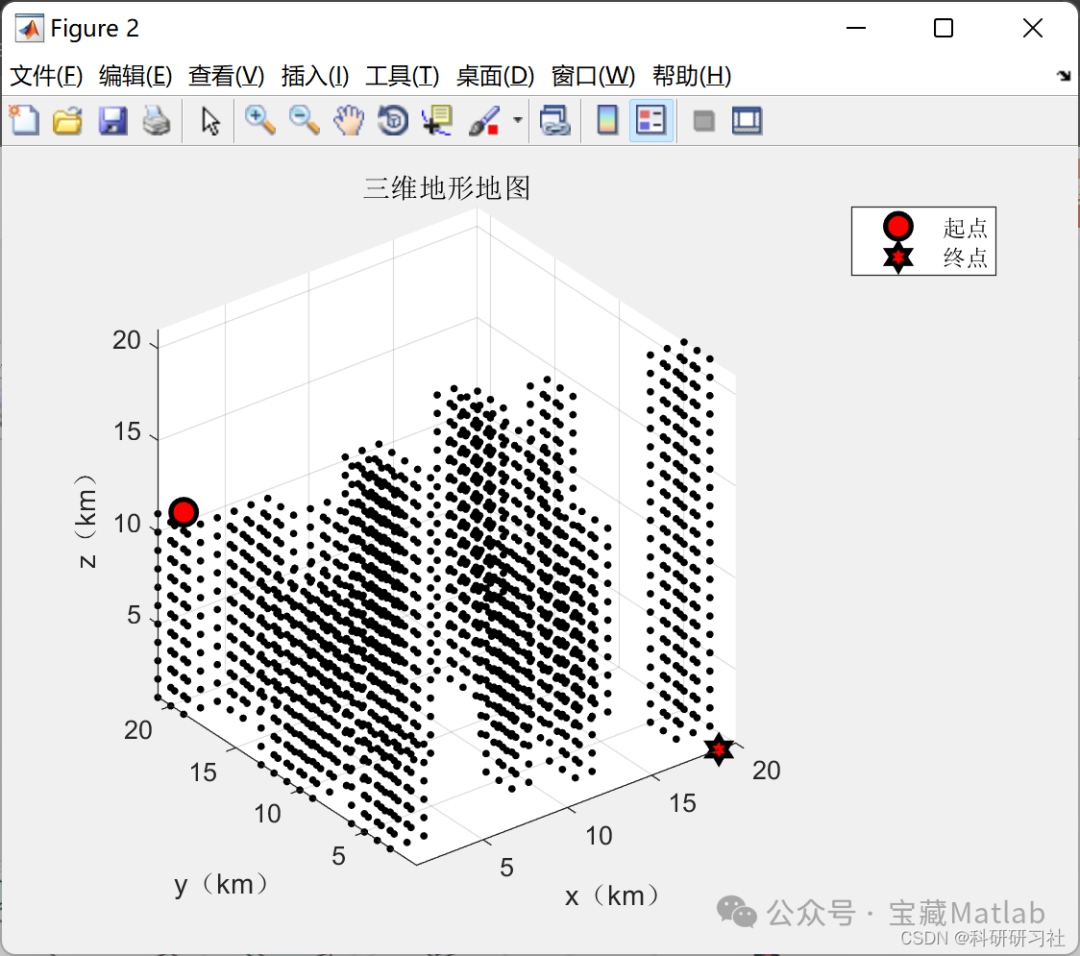
2 运行结果
无人机作为一种现代航空设备,不仅作业速度快,成本低,还具有卓越的灵活性和时效性.常用于完成那些繁冗、危险、对灵活性要求较高、作业范围较大的任务,比如航空拍摄、农药喷洒、边防检查、电力检测、防汛扛旱等领域.随着技术的发展,将无人机独特的优势和不同的行业技术相结合,可以应用到不同的行业.比如,无人机搭载成像传感器,可以组成一种可以捕获目标图像的新型监视设备2'.目前,许多国家都在积极拓展无人机与工业应用相结合的技术,因此无人机应用的研究一直备受关注.
部分理论引用网络文献,如有侵权请联系删除。
3 参考文献
[1]马华伟,马凯,郭君.考虑多投递的带无人机车辆路径规划问题研究[J].计算机工程,2022,48(8):299-305
[2]陈亚青,郑稀元,韩丹,刘成.民用无人机发展管理现状及路径规划研究进展[J].科学技术与工程,2022,22(15):5951-5966
4 Matlab代码实现
详情请联系:


















 1250
1250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









