







扩展卡尔曼滤波的仿真案例,参考书为北航宇航学院王可东老师的Kalman滤波基础及Matlab仿真
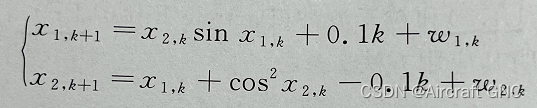
一、状态模型:
二、测量模型:
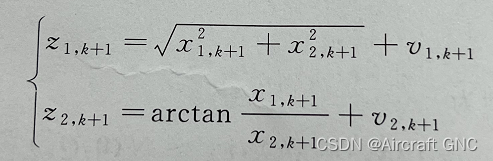
状态方程和测量方程中的噪声均为期望为零的白噪声。
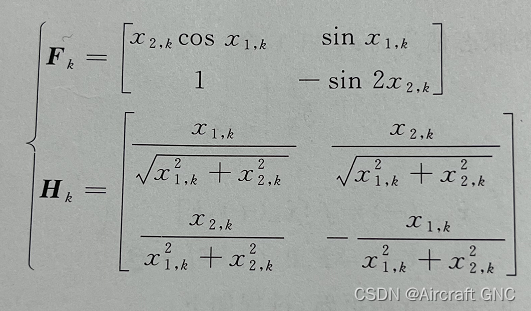
三、状态模型和测量模型的线性化(Jacobian矩阵):
四、状态模型和测量模型的噪声矩阵及初始状态及协方差矩阵:

五、C++ 仿真源码:
EKF.h
#pragma once
#include <fstream>
#include <string>
#include <iostream>
#include <Eigen/Dense>
#include "RandomGenerate.h"
class EKF
{
public:
EKF();
virtual ~EKF();
void Filter(); // 扩展卡尔曼滤波主函数
private:
void Initialize(); // 初始化相关参数
void GenerateXreal(int k); // 生成状态向量真实值
void GenerateZreal(); // 生成测量向量值
Eigen::Vector2d Nonlinearf(int k); // 非线性状态方程(非线性映射)
Eigen::Matrix2d JacobianMatrixF(); // 计算状态方程雅可比矩阵(线性化矩阵)
void Prediction(const Eigen::Vector2d& f, const Eigen::Matrix2d& F); // 一步预测
Eigen::Vector2d Nonlinearh(); // 非线性测量方程
Eigen::Matrix2d JacobianMatrixH(); // 计算测量方程雅可比矩阵(线性化矩阵)
void Update(const Eigen::Vector2d& h, const Eigen::Matrix2d& H); // 测量更新
private:
Eigen::Vector2d xpre; // 状态向量预测值
Eigen::Matrix2d Ppre; // 状态协方差矩阵预测值
Eigen::Matrix2d Q; // 状态方程噪声矩阵
Eigen::Matrix2d R; // 测量方程噪声矩阵
Eigen::Matrix2d K; // 卡尔曼增益矩阵
Eigen::Vector2d xest; // 状态向量估计值
Eigen::Matrix2d Pest; // 状态协方差矩阵估计值
Eigen::Vector2d xreal; // 状态向量真实值
Eigen::Vector2d zreal; // 测量向量值
private:
std::string FileName; // 文件名
std::ofstream outFile; // 文件路径
};
EKF.cpp
#include "EKF.h"
// 构造函数
EKF::EKF() : FileName("./FilterEKF.txt"), outFile(FileName, std::ios::out)
{
// 初始化相关参数
Initialize();
}
// 析构函数
EKF::~EKF()
{
}
// 初始化相关参数
void EKF::Initialize()
{
// 初始化状态方程噪声矩阵
Q << 0.01, 0,
0, 0.1;
// 初始化测量方程噪声矩阵
R << 1, 0,
0, 0.1;
// 初始化状态协方差矩阵估计值
Pest << 10, 0,
0, 10;
// 初始化状态向量估计值
xest << 1, 1;
// 真实值
xreal = xest;
return;
}
// 生成状态向量真实值
void EKF::GenerateXreal(int k)
{
xreal(0) = xreal(1) * sin(xreal(0)) + 0.1 * k + sqrt(Q(0,0)) * getRandom();
xreal(1) = xreal(0) + cos(xreal(1)) * cos(xreal(1)) - 0.1 * k + sqrt(Q(1, 1)) * getRandom();
return;
}
// 生成测量向量值
void EKF::GenerateZreal()
{
zreal(0) = xreal.norm() + sqrt(R(0, 0)) * getRandom();;
zreal(1) = atan(xreal(0) / xreal(1)) + sqrt(R(1, 1)) * getRandom();
return;
}
// 非线性状态方程(非线性映射)
Eigen::Vector2d EKF::Nonlinearf(int k)
{
Eigen::Vector2d f;
f(0) = xest(1) * sin(xest(0)) + 0.1 * k;
f(1) = xest(0) + cos(xest(1)) * cos(xest(1)) - 0.1 * k;
return f;
}
// 计算状态方程雅可比矩阵(线性化矩阵)
Eigen::Matrix2d EKF::JacobianMatrixF()
{
Eigen::Matrix2d F;
F(0, 0) = xest(1) * cos(xest(0));
F(0, 1) = sin(xest(0));
F(1, 0) = 1.0;
F(1, 1) = -sin(2*xest(1));
return F;
}
// 一步预测
void EKF::Prediction(const Eigen::Vector2d &f, const Eigen::Matrix2d &F)
{
// 状态向量预测值
xpre = f;
Eigen::Matrix2d Pxx = F * Pest * F.transpose();
// 状态协方差矩阵预测值
Ppre = Pxx + Q;
return;
}
// 非线性测量方程
Eigen::Vector2d EKF::Nonlinearh()
{
Eigen::Vector2d h;
h(0) = xpre.norm();
h(1) = atan(xpre(0) / xpre(1));
return h;
}
// 计算测量方程雅可比矩阵(线性化矩阵)
Eigen::Matrix2d EKF::JacobianMatrixH()
{
Eigen::Matrix2d H;
double a = xpre.norm();
H(0, 0) = xpre(0) / a;
H(0, 1) = xpre(1) / a;
H(1, 0) = xpre(1) / (a * a);
H(1, 1) = -xpre(0) / (a * a);
return H;
}
// 测量更新
void EKF::Update(const Eigen::Vector2d& h, const Eigen::Matrix2d& H)
{
Eigen::Matrix2d Pzz = H * Ppre * H.transpose();
Eigen::Matrix2d Pvv = Pzz + R;
Eigen::Matrix2d Pxz = Ppre * H.transpose();
K = Pxz * Pvv.inverse();
xest = xpre + (K * (zreal - h));
Pest = Ppre - (K * Pvv * K.transpose());
return;
}
// 扩展卡尔曼滤波主函数
void EKF::Filter()
{
std::cout << "请输入采样点个数:" << std::endl;
int num;
std::cin >> num;
for (int i = 0; i != num; i++)
{
// 生成状态向量真实值
GenerateXreal(i);
// 生成测量向量值
GenerateZreal();
// 非线性状态方程(非线性映射)
Eigen::Vector2d f = Nonlinearf(i);
// 计算状态方程雅可比矩阵(线性化矩阵)
Eigen::Matrix2d F = JacobianMatrixF();
// 一步预测
Prediction(f, F);
// 非线性测量方程
Eigen::Vector2d h = Nonlinearh();
// 计算测量方程雅可比矩阵(线性化矩阵)
Eigen::Matrix2d H = JacobianMatrixH();
// 测量更新
Update(h, H);
// 保存到文件
outFile << xreal(0) << ", " << xreal(1) << ", " << xest(0) << ", " << xest(1) << ", " << xpre(0) << ", " << xpre(1) << std::endl;
// 输出到控制台
//std::cout<< i <<": " << abs(xreal(0)-xest(0)) << ", " << abs(xreal(1) - xest(1)) << std::endl;
}
return;
}
demo.cpp
#include "UKF.h"
#include "EKF.h"
int main()
{
UKF ukf;
//ukf.Filter();
EKF ekf;
ekf.Filter();
system("pause");
return 0;
}
六、仿真结果:
%% 测试 C++ 程序的可行性。
clear;
clc;
%% 读入C++数据
x = dlmread('Filter.txt');
n = length(x(:,1));
t = 1 : n;
%% 状态
figure;
plot(t, x(:,1), '*-');
hold on;
plot(t, x(:,2), 'o-');
legend('real1','real2');
title('状态');
xlabel('时间/s');
grid on;
%% 状态1
figure;
plot(t, x(:,1), 's-', t, x(:,3), 'o-', t, x(:,5),'*-');
legend('real1','est1','pre1');
title('状态1');
xlabel('时间/s');
grid on;
%% 状态2
figure;
plot(t, x(:,2), 's-', t, x(:,4), 'o-', t, x(:,6),'*-');
legend('real2','est2','pre2');
title('状态2');
xlabel('时间/s');
grid on;
%% 状态1误差
figure;
plot(t, x(:,1)-x(:,3), 'o-', t, x(:,1)-x(:,5),'*-');
legend('est1','pre1');
title('状态1误差');
xlabel('时间/s');
grid on;
%% 状态2误差
figure;
plot(t, x(:,2)-x(:,4), 'o-', t, x(:,2)-x(:,6),'*-');
legend('est2','pre2');
title('状态2误差');
xlabel('时间/s');
grid on;





由图 1、图 2 可知,这两个状态虽然是非线性的,但是其总体趋势都呈线性变化,即非线性程度较弱,因此采用 EKF 滤波算法有望实现较好的估计结果;由图 3、图4 来看,EKF 滤波效果较好,对状态 1 和状态 2 均能很好的估计,滤波误差较小,且滤波(估计)的精度比预测的精度高。















 1331
1331











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









