






一、源码安装
1. evo 安装既可指令安装,也可源码安装。本文采用的是源码安装。
(1)evo 对 python 版本有要求, v 1.12.0 版本是最后一个支持 python2 的版本。
(2)本文安装的就是 v 1.12.0 版本。
(3)指令安装为以下指令,默认安装最新版本的 evo ,需注意 python 版本!!!!!
pip install evo --upgrade --no-binary evo(4)源码安装为本文所述方法。
2. 首先查看 python 版本,输入指令,看到当前 python 版本为 3.6.9 的版本
python --version
(4)切换 python 版本,输入以下指令,切换为 2.7.17 的版本
sudo update-alternatives --config python
注:出现报错

解决办法:
sudo update-alternatives --install /usr/bin/python python /usr/bin/python2 100
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 150


(5)打开 evo 的github ,并切换到 v 1.12.0 版本 下载

(4)进入下载后的 evo 文件夹内,输入以下指令
pip install --editable . --upgrade --no-binary evo
出现 Successfully installed evo ,即安装成功。
二、测试
(1)输入以下指令即可
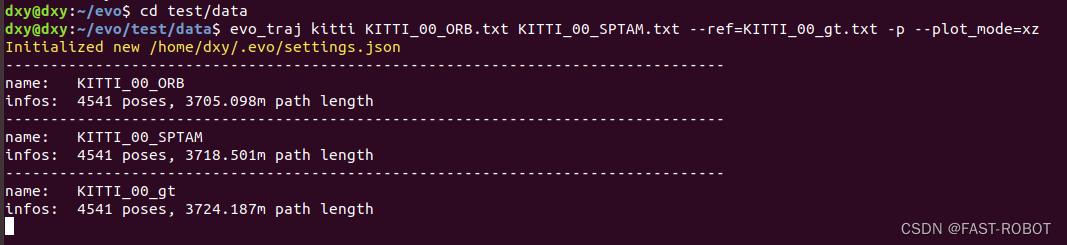
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
注:如果发生以下错误,则重启电脑
evo_traj:command not found
















 2446
2446











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









