






逆变器双闭环控制一般由电压外环和电流内环构成。采用电感电流内环时,负载扰动位于电流环外,导致系统动态响应慢、抗扰能力弱,但限制电流尖峰能力强;而电容电流内环通过直接控制电容电流的微分效应,提前矫正输出电压,可以显著提升动态性能与抗扰性,但缺乏功率管限流保护功能。
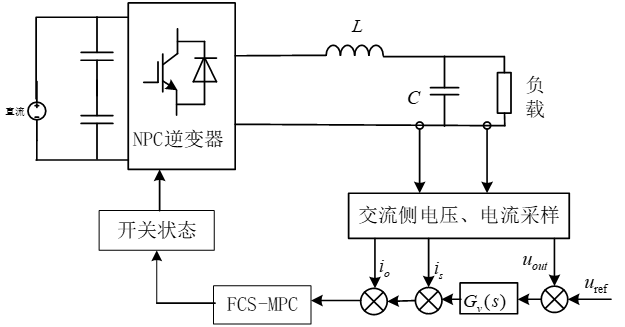
为便于整定控制系统参数,可将本章所述的MPC电流环等效为含负载电流前馈的电感电流内环,故仅需设计电压外环调节器,形成双闭环控制系统如图2.6所示。该方案兼具MPC快速响应与负载前馈补偿优势,实现动态性能与算法复杂度的平衡。
交流侧输出滤波器数学模型如图2.7所示。
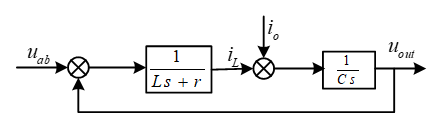
图2.7 逆变器模型图
将图2.6和图2.7结合后可得控制系统整体结构如图2.8所示。
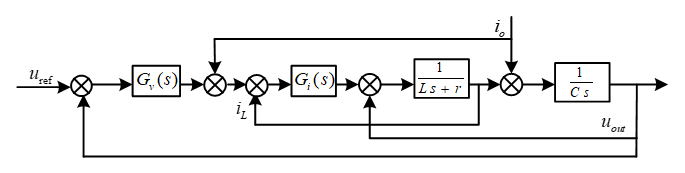
图2.8 控制系统模型图
电压环采用PI调节器,电流环亦可等效为PI调节器,取阻尼系数和带宽为: , /s。
越高,系统的响应越快。但带宽过高会导致相位裕度不足引发振荡。在《电力电子装置及系统》一书中指出电流环通常取 的开关频率,电压环取电流环带宽的 。故 约为2000~4000rad/s,适用于高动态性能电压环。
由上式并结合实际情况进行微调,得到 , 。
根据计算结果搭建Simulink仿真模型如图2.9所示。其中io为根据负载参考电压得到的参考电流。
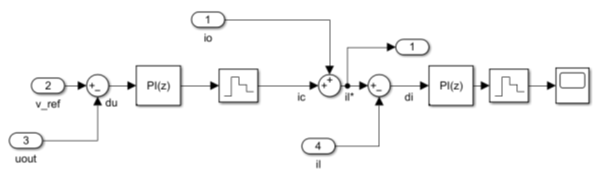
图2.9带负载电流前馈的双环控制Simulink模型图
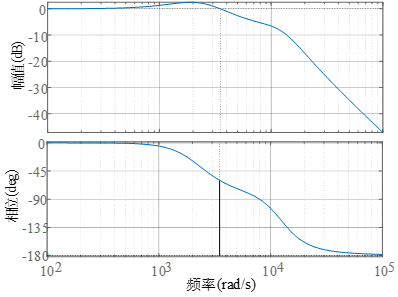
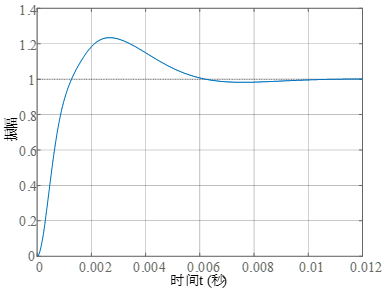
绘制图2.10所示控制系统的波特图和阶跃响应图。从中可以看出系统相角裕度足够,增益符合预期,表明控制器设计满足要求。
(a) 控制系统的阶跃图
(b)控制系统的波特图
图2.10控制系统的阶跃图与波特图
将 回带到图2.8控制系统模型中,首先得到整个系统的内环传递函数表达式为:
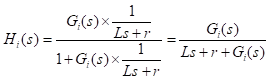 (2.25)
(2.25)
将 和式(2.25)回带到图2.8控制系统模型中,得到整个系统的传递函数表达式为:
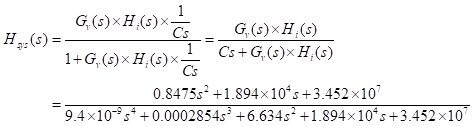 (2.26)
(2.26)
根据式(2.26)计算可得系统存在2对共轭复数极点:
 (2.27)
(2.27)
其对应的阻尼比和自然振荡频率分别为:
 (2.28)
(2.28)
不难看出,系统欠阻尼(  )但振荡可控, 满足响应速度需求(2000~4000rad/s)。根据式(2.26)绘制系统的根轨迹,如图2.11所示。极点的实部绝对值量级为 ,故系统的调节时间短,系统响应快。根轨迹全程未进入右半平面,系统既稳定,又具备较好的动态性能。
)但振荡可控, 满足响应速度需求(2000~4000rad/s)。根据式(2.26)绘制系统的根轨迹,如图2.11所示。极点的实部绝对值量级为 ,故系统的调节时间短,系统响应快。根轨迹全程未进入右半平面,系统既稳定,又具备较好的动态性能。
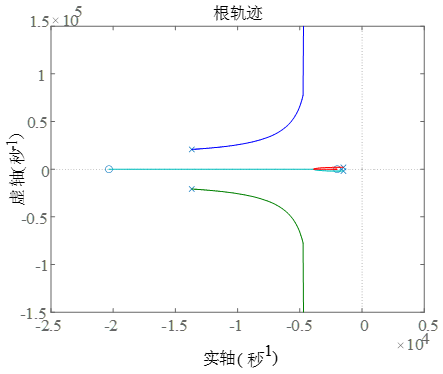
图2.11系统的根轨迹
matlab代码为
https://download.csdn.net/download/qq_43890178/90542250

















 6028
6028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









