







首先声明我写的代码主要参考了这位仁兄的,非常感谢他把自己的源代码奉献出来。他的代码是基于标准库函数的,代码过程简单明了,非常适合移植。
STM32 使用 PCA9685 控制舵机,控制机械臂,控制LED
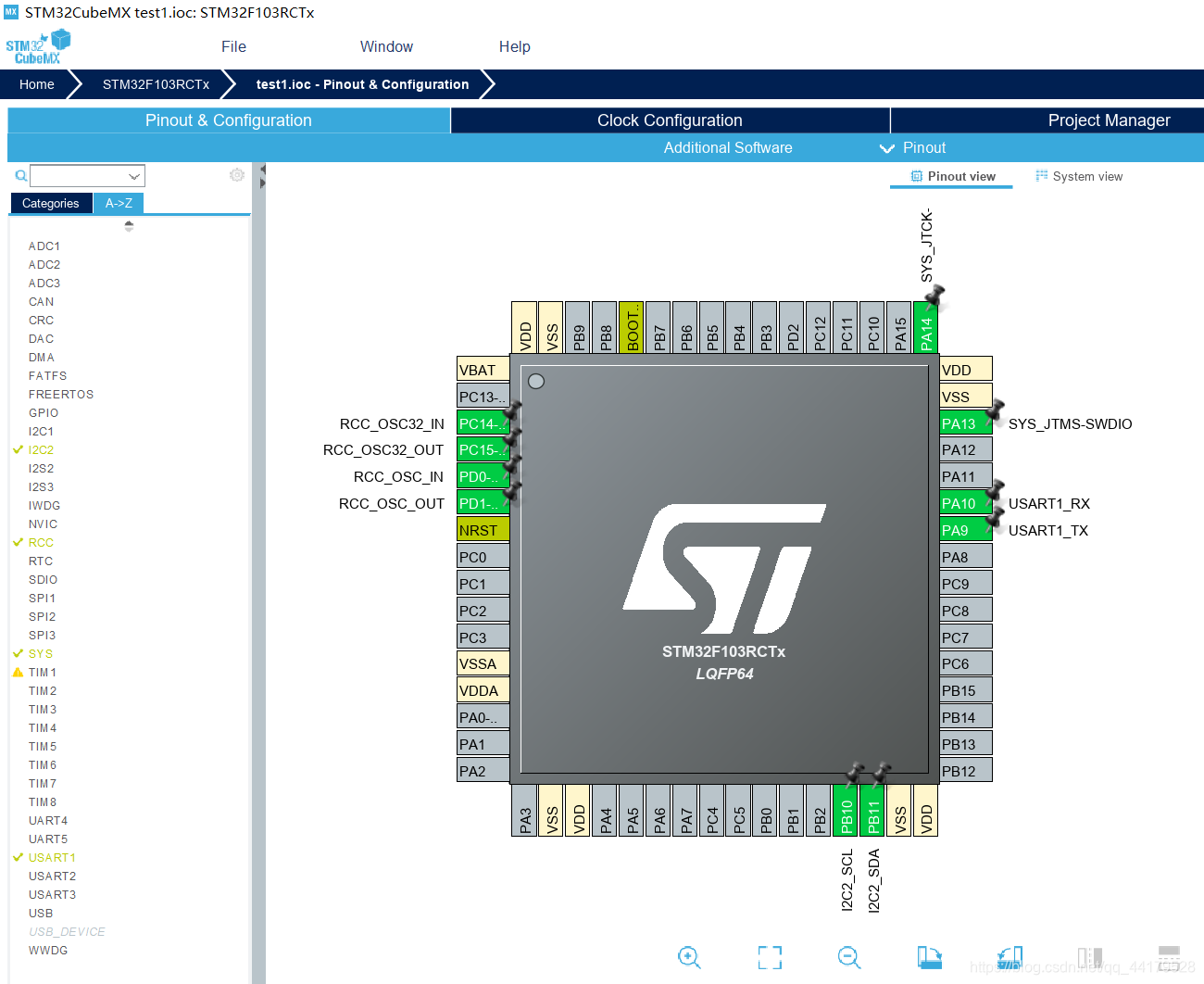
我的代码是在他的基础上做的修改,使用了现在比较流行的HAL库进行配置。先使用了codemx配置了stm32的基础配置和IIC引脚配置,之后直接把他的代码拿过来稍微改了一改就可以直接使用了。
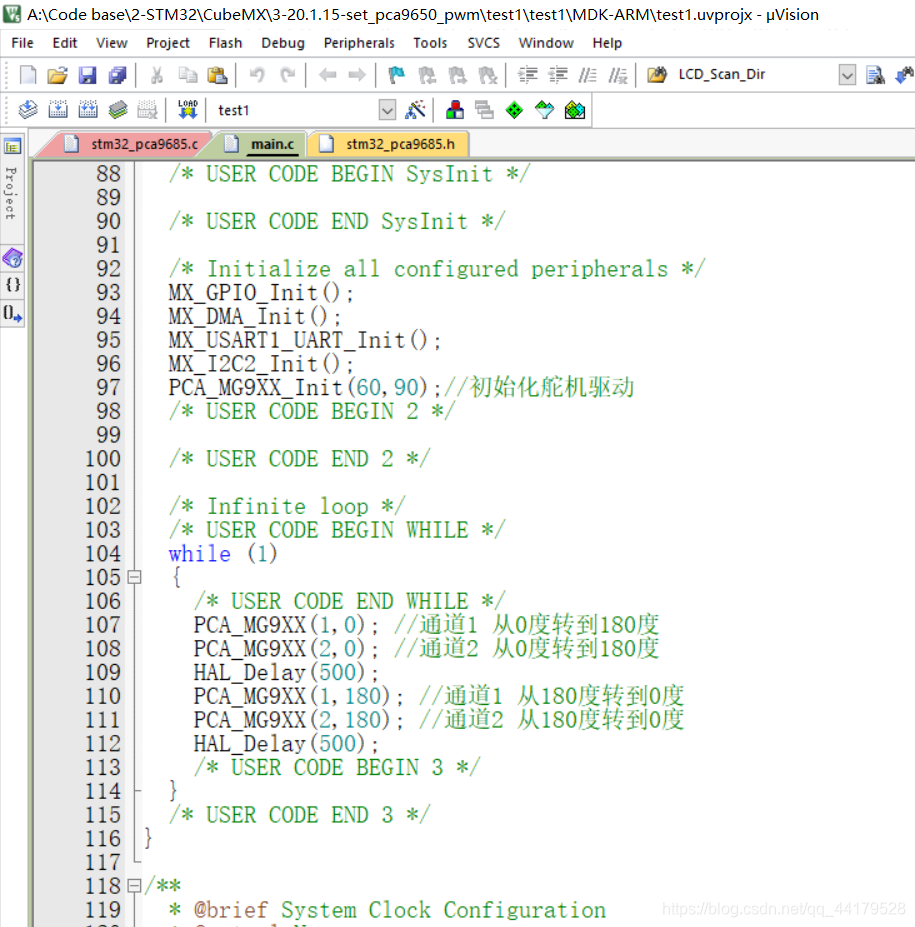
实验证明还是比较方便使用的,在实际过程中可以实现对两个舵机的角度控制;
当然可以使用任何一个通道,任意多个通道对多个舵机进行控制,PCA9685这个模块通用起来还是很方便的。
下面是我githee的仓库,里面存放了我使用Codemx配置的相关文件,可以拿来直接用就可以了。
使用codemx配置了stm32F103RCT6单片机的一个单独的IIC2号通道。实现对PCA…
除了githee我还在csdn上面保存了工程所有文件的所有文件,方便下载学习!
233333333














 5086
5086











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









