







Content
首先,这一节我们会用到 P1_M4_L2 The Kinematic Single-Track Model(单轨运动学模型)作为基础,如果忘记了可以先大概回顾一下。
从运动学到动力学得本质:解除运动无滑移的假设。
1. Build Lateral Dynamic Model from Kinematic Bicycle Model(基于自行车运动学模型构建汽车的横向动力学模型)
1.1 Assumptions(前提假设)
(1)在车辆直行的时候,如果车辆有加速和减速,我们依然可以比较简单分析。但是,现在我们在研究车辆的转弯,如果还加上加速度,那就显得比较麻烦咯。所以,我们假设车辆现在恒速前进,即车轮角加速度为零。
(2)将四个车轮简化为两个,也就是左右前轮、左右后轮分别是同步运动的。

(3)忽略悬挂运动、路面斜度(会引起车轮压力变化)、空气阻力等等引起的非线性因素。
1.2 Lateral Dynamics(横向动力学)
(1)上次讲单轨运动学模型的时候,说到参考点可以是前轮轴心、车辆重心、后轮轴心。为了简化牛顿第二定律的表达式,这次我们选择车辆重心作为参考点。
(2)物理量分析:


①
ψ
\psi
ψ:记不记得上次运动学模型有个
θ
\theta
θ 角,是的,动力学模型用
ψ
\psi
ψ 替换了。

② Fyf、Fyr :分别是地面对前后轮的横向摩檫力。(物理说的摩擦力有时也是有利的,说的就是它)
为什么会有横向摩檫力??因为现在我们已经解除了无滑移的假设,所以车轮会在其横向滑移而产生摩檫力。
③ 其他物理量在运动学模型中已分析过。
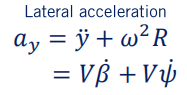
(3)横向惯性总加速度 = 横向移动加速度(滑移产生) + 旋转向心加速度(朝向变化产生)
① 横向速度为 V*sin
β
\beta
β,且速度V恒定,因此横向加速度为V*
β
˙
\dot{\beta}
β˙*cos
β
\beta
β
⇒
\Rightarrow
⇒V*
β
˙
\dot{\beta}
β˙;其中
β
˙
\dot{\beta}
β˙表示滑动导致的角变化率。
说明一下
β
\beta
β的意义 :他表示了车辆的实际运动方向(质心速度方向)与后轮(车轴)速度方向的夹角,也就是车辆沿着车轴方向的滑移。
② 向心加速度中
ω
\omega
ω 为车辆绕瞬时旋转中心(ICR)的角速度;其中
ψ
˙
\dot{\psi}
ψ˙表示车辆的朝向(偏航角)变化率。
(4)由牛顿第二定律和扭矩平衡方程得:

所以,现在我们需要知道Fyf、Fyr才能进一步求解偏航角的角加速度。
(5)轮胎滑移角度与轮胎横向摩檫力的关系:
① 前后轮胎滑移角
α
\alpha
αr 、
α
\alpha
αf 的意义:表示轮胎的朝向与轮胎实际运动速度方向的夹角,也就是轮胎的滑移程度。

② 在滑移角度较小时,摩檫力与滑移力成近似线性关系:

③ 根据比例系数可以算出摩檫力的大小:

(6)将摩檫力带入前面的方程:
可解得车辆滑移率
β
˙
\dot{\beta}
β˙ 和偏航角加速度
ψ
¨
\ddot{\psi}
ψ¨。

1.3 模型总结
建好了模型,我们应该知道要怎么去用:
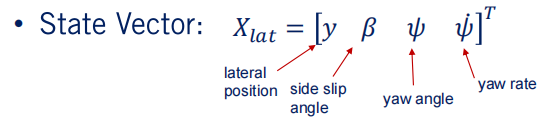
一般而言,我们可以直接获取车辆横向位置 y(定位)、车辆滑移角度
β
\beta
β(如用IMU测得的质心速度与车轴方向的角度)、车辆偏航角度
ψ
\psi
ψ(定位)和偏寒角速度
ψ
˙
\dot{\psi}
ψ˙(例如IMU中的陀螺仪测得)。
获取到这些物理量后,我们再给定一个转弯的幅度(也就是前轮的转角),就可以求得所测得物理量的导数。
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









