







一、控制背景
- 我们设计了一台ROS机器人,其中ROS机器人上搭载 树莓派4b 控制器,我们将其设为ROS主机,主要负责激光雷达扫描、视觉信息读取、SLAM算法运行等工作;同时,我们将电脑端的虚拟机设为ROS从机,主要负责运行RVIZ、GAZEBO 以及键盘控制节点等功能。
二、控制模式
- 如下图所示,ROS主机发出WIFI信号,ROS从机连接WIFI信号,使得ROS主机和从机均位于同一局域网之下。我们采用这种控制方式可以大大节约树莓派(ROS主机)的资源,从而使运行效率更高。

三、网络连接方式
-
上图中采用ROS从机连接ROS主机发出的WIFI,从而达到两者在同一局域网的目的。其实下述两种方案均可实现两者在同一局域网的目的。
-
通过实际项目测试发现,方案2的网络更加稳定。

四、网络配置
1.我们通过 “ ifconfig ”的命令分别来查询ROS主机和ROS从机的IP地址。
关于“ ifconfig ”命令的详解,读者可以参考此片文章:ifconfig详解

此时,我们可以得到ROS从机(虚拟机端)的IP为:192.168.1.200
使用同样的方法我们可以得到ROS主机(树莓派端)的IP为:192.168.1.101
2. 配置 .bashrc 文件
我们使用下述命令打开 .bashrc 文件
sudo gedit ~/.bashrc
在ROS主机的 .bashrc 文件末尾添加
export ROS_MASTER_URI=http://192.168.1.101:11311
export ROS_HOSTNAME=192.168.1.101
在ROS从机的 .bashrc 文件末尾添加
export ROS_MASTER_URI=http://192.168.1.101:11311
export ROS_HOSTNAME=192.168.1.200
其中:

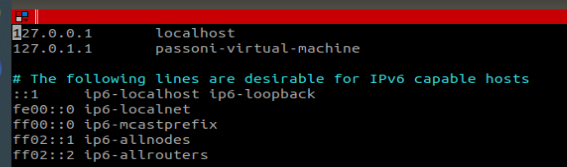
3.配置host文件
关于host文件的作用可以,读者可以查阅此篇文章:host文件
我们使用下述命令打开host文件:
sudo vi /etc/hosts
4.软件设置注意事项

5.远程控制
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









