






 本文研究了使用CORS站和滑坡监测站数据评估实时高精度滑坡监测算法的效果,涉及基准站模糊度固定、大气延迟建模(包括电离层和对流层)以及监测终端在VAC模式下的定位误差分析。结果显示,电离层延迟显著影响定位,VAC模式提供更优的定位精度。
本文研究了使用CORS站和滑坡监测站数据评估实时高精度滑坡监测算法的效果,涉及基准站模糊度固定、大气延迟建模(包括电离层和对流层)以及监测终端在VAC模式下的定位误差分析。结果显示,电离层延迟显著影响定位,VAC模式提供更优的定位精度。
实验数据及数据处理策略
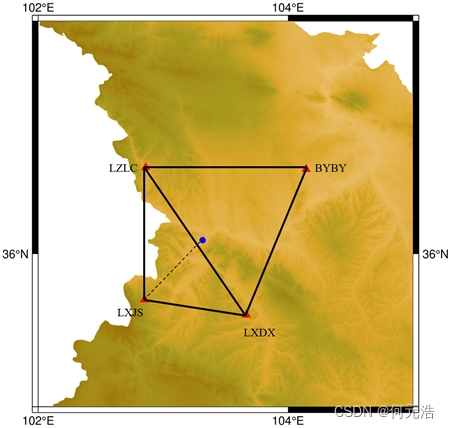
为了评估基于GNSS参考站网的实时高精度滑坡监测算法效果,如图2所示,本文共收集了中国西北2019年年积日第271~277共7天的4个CORS站数据,分别为LZLC、BYBY、LXDX、LXJS, 2个黑方台滑坡监测站数据HF01和HF06,其中HF01作为黑方台滑坡监测基准站,HF06作为流动站,其中4个CORS站(红色三角形),用于提取大气延迟信息并建模,另外2个滑坡监测站(蓝色圆形)用于测试滑坡监测算法的终端定位效果。根据Delaunay三角形构网规则,4个CORS站共形成5条基线,平均站间距为105.4km。表1给出了所形成的5条基线长度与高差,其中最长基线128.7km,最大高差609.0m。CORS站所有的接收机型号均为TRIMBLE NETR9,版本号为4.85,天线型号为TRM59900.00,接收机同时支持GPS/BDS系统双频数据,数据采样率为15 s,数据采集时段接收机仅能获取北斗二号(BDS-2)观测数据,滑坡监测站所用接收机型号是芯星通高精度UB380,天线类型为HG-GOYH7151,数据采样率为1s,接收机可接收四系统观测数据。
| 基线 | 间距/km | 高差/m |
| LZLC-LXJS | 95.2 | -439.3 |
| LXJS-LXDX | 74.5 | -3.4 |
| LXDX-LZLC | 128.7 | 442.6 |
| LXDX-BYBY | 113.6 | 609.0 |
| BYBY-LZLC | 115.1 | -166.4 |
基准站模糊度固定效果分析
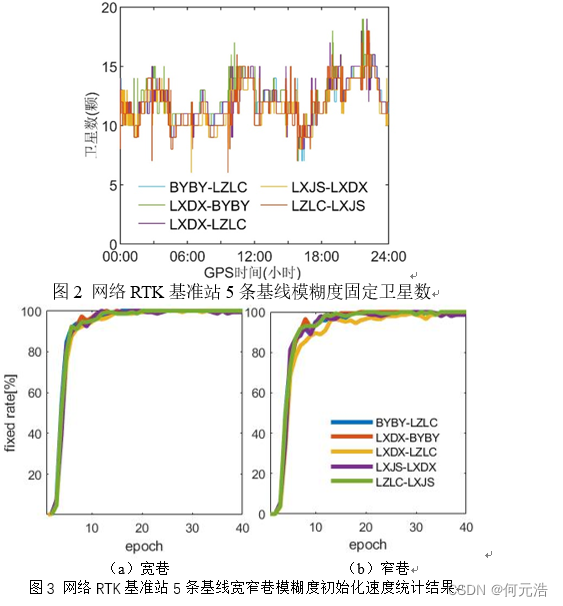
基准站波相位模糊度固定是进行高精度大气建模的关键。图3给出了2019年9月28日5条基线模糊度固定的卫星数。由于本文采用了部分模糊度固定算法,误差建模误差较大的卫星在模糊度固定时可直接被剔除,从图3中可以看出,尽管参考站平均站间距超过200 km,5条基线模糊度固定率都较高;初始化后所有基线的模糊度固定率接近100%;不考虑参考卫星,每条基线模糊度固定的卫星数在8~16颗左右。
初始化速度是评价网络RTK的性能指标的关键,在处理基线时每40个历元(10 min)初始化一次,1 d共初始化144个时段。图4统计了2019年9月28日5条基线宽巷和窄巷模糊度初始化速度的概率累计分布曲线。从图4中可以看出,在10个历元内(2.5min)窄巷模糊度有90%以上的时段得到固定解;5条基线 有95%以上的时段可在20个历元内可以完成初始化。相比窄巷模糊度,宽巷模糊度所需的初始化时间更短。
大尺度网络RTK大气延迟建模精度分析
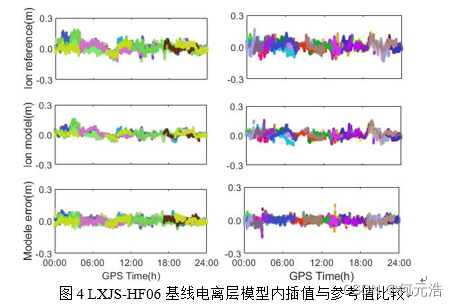
大气建模内插精度与终端定位性能密切相关。与流动站最近的参考站称为主参考站,此算例中,LXJS作为HF06的主参考站。图5分别给出了LXJS-HF06基线GPS时(GPS time,GPST) 00:00—24:00内GPS和BDS可视卫星的双差电离层延迟结果(不同颜色代表不同卫星)。电离层延迟参考值是将流动站GNYL站作为基准站计算出来的。从图5中可以看出,由于参考站基线距离较长双差电离层延迟较为显著,双差电离层延迟和电离层的活跃程度密切相关,在正午时段(GPST 5:00-7:00,对应地方时12:00—14:00)部分卫星的双差电离层延迟达20 cm。另外,大尺度SNAP基准站网的电离层建模误差较大,部分时段建模误差达10 cm,接近载波观测值波长的二分之一,若将该电离层建模值直接用于生成虚拟参考站观测值,将会引入对应数值的建模误差。
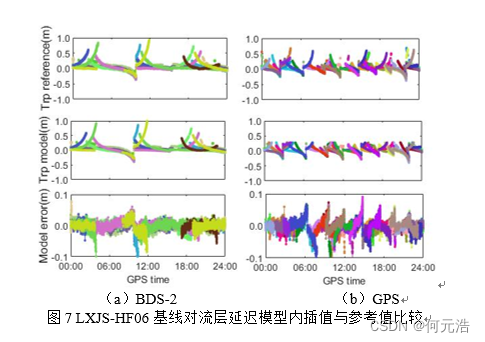
除了电离层延迟,对流层延迟建模误差也会对终端定位性能产生影响。和电离层模型一致,用于生成虚拟基准站观测值的双差对流层模型也采用线性内插法,与电离层建模不同的是对流层建模前需采用先验高精度GPT2模型进行高程归化[30]。图6给出了LXJS-HF06基线GPST 0:00—24:00 GPS和BDS-2可视卫星的双差对流层建模值及其误差。从图6可以看出,BDS双差对流层延迟最大可达1m,部分时段对流层建模误差达到10cm,可能与参考站间高差过大相关。
监测终端定位效果分析
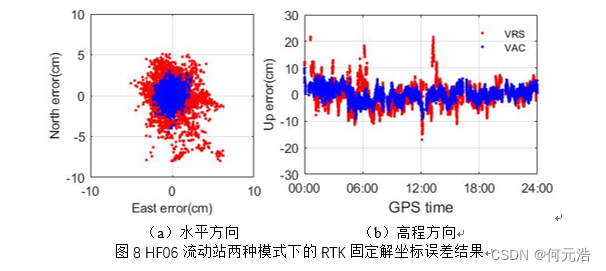
图7是2019年年积日第271天,HF06流动站基于虚拟基准站观测值和虚拟大气观测值约束两种服务模式下的定位误差结果,仅给出了模糊度固定解的定位结果。从图7中可以看出,VAC模式下的定位误差整体小于虚拟基准站模式;VAC模式下水平和高程方向的误差基本在3 cm以内,而虚拟基准站模式下有较多历元水平方向的误差超过了5 cm;1 d内VAC模式下水平和高程方向的均方根误差分别为0.96cm和2.5cm,虚拟基准站模式下水平和高程方向的RMS分别达2.3cm和4.3cm。

















 75
75

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









