







三相永磁同步电机的控制方法之直接转矩控制(DTC, Direct Torque Control)
直接转矩控制(DTC,Direct Torque Control)是一种高性能的电机控制方法,广泛应用于永磁同步电机(PMSM)、感应电机(IM)和其他类型的电机。与矢量控制(FOC)不同,DTC不依赖于复杂的坐标变换和PI控制器,而是通过直接控制电机的电磁转矩和磁链,实现快速动态响应和高精度控制。
直接转矩控制的原理
- 基本原理
DTC的核心思想是通过直接控制电机的电磁转矩和磁链,而不是分别控制电流的d轴和q轴分量。它利用电机的数学模型,实时计算电磁转矩和磁链,并通过开关表选择逆变器的开关状态,快速调节转矩和磁链。 - 关键变量

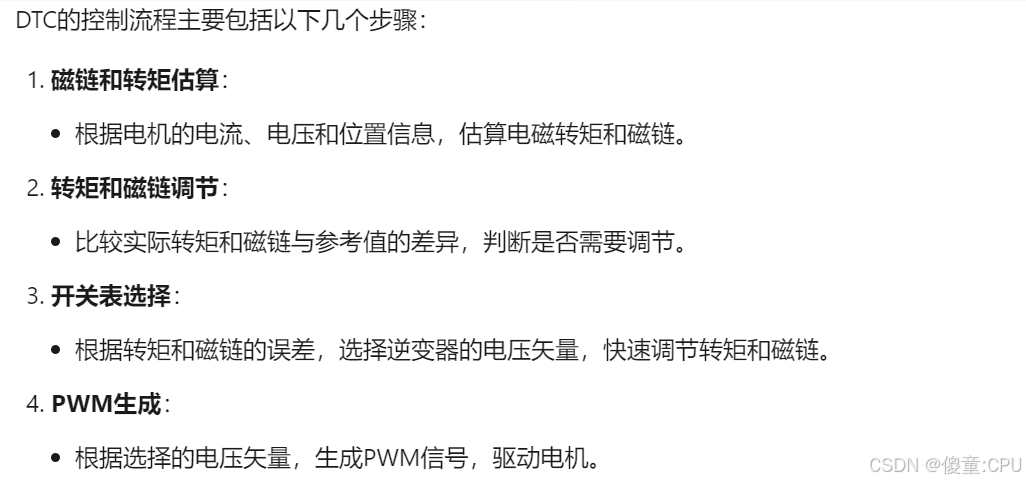
- 控制流程
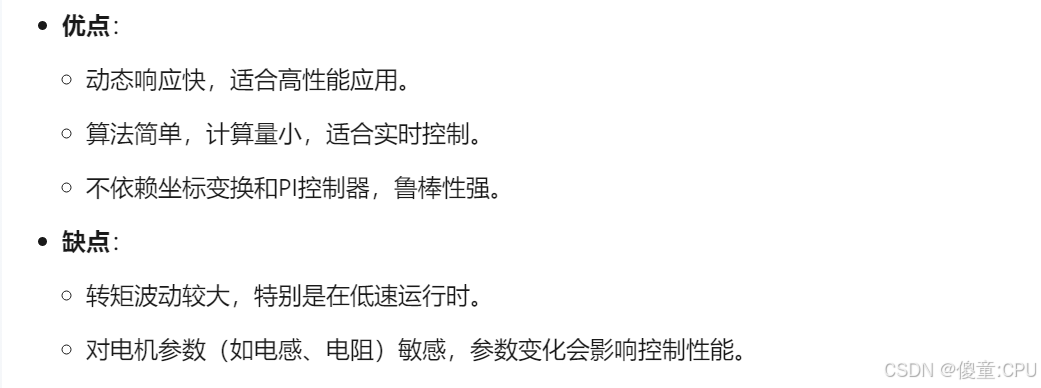
- 优点与缺点
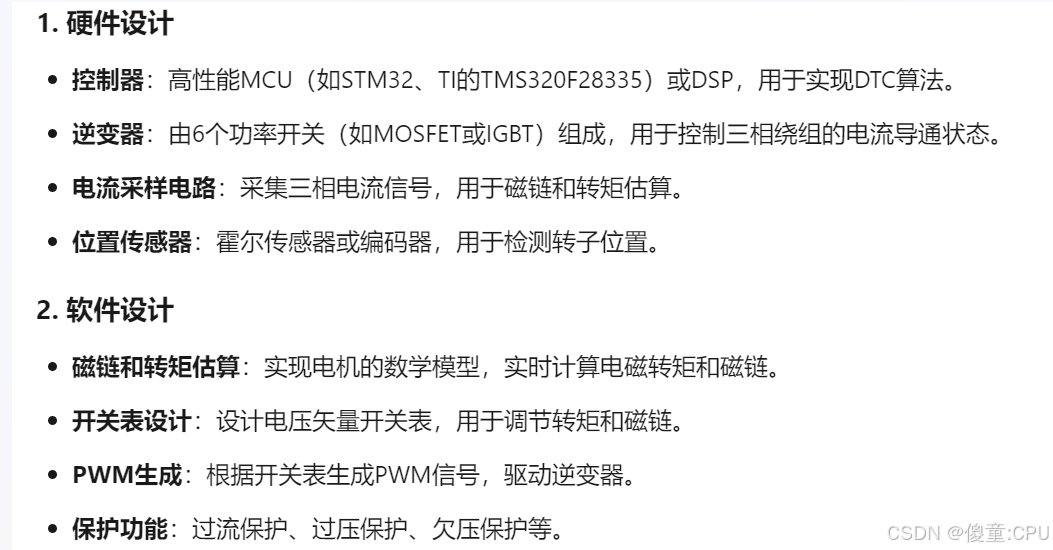
直接转矩控制的设计
以下是一个简化的直接转矩控制(DTC)的C语言实现案例,假设电机为三相感应电机(IM),使用STM32微控制器。
定义电机控制所需的基本变量。
#include "stm32f4xx_hal.h"
#include <math.h>
// 定义三相电流和电压
float ia, ib, ic; // 三相电流
float va, vb, vc; // 三相电压
// 定义磁链和转矩
float psi_alpha, psi_beta; // 磁链(α-β坐标系)
float torque; // 电磁转矩
float flux_ref = 1.0; // 参考磁链
float torque_ref = 0.5; // 参考转矩
// 定义PI控制器
float torque_error, flux_error;
float torque_integral = 0.0, flux_integral = 0.0;
float kp_torque = 0.1, ki_torque = 0.01; // 转矩PI参数
float kp_flux = 0.1, ki_flux = 0.01; // 磁链PI参数
// 定义逆变器电压矢量
float voltage_vectors[8][3] = {
{1, 0, 0}, // V0
{1, 0, -1}, // V1
{0, 0, -1}, // V2
{-1, 0, -1},// V3
{-1, 0, 1}, // V4
{0, 0, 1}, // V5
{1, 0, 1}, // V6
{0, 1, 0} // V7 (零矢量)
};
Clarke变换:将三相电流或电压信号转换为两相静止坐标系(α-β)。
void Clarke_Transform(float ia, float ib, float ic, float *ialpha, float *ibeta) {
*ialpha = ia; // Ia remains the same
*ibeta = (ib - ic) / sqrt(3); // Beta component calculation
}
磁链估算:通过Clarke变换后的信号,估算磁链。
void Flux_Estimation(float ialpha, float ibeta, float va_alpha, float vb_beta, float *psi_alpha, float *psi_beta) {
static float psi_alpha_prev = 0.0, psi_beta_prev = 0.0;
float rs = 1.0; // 定子电阻
*psi_alpha = (va_alpha - ialpha * rs) + psi_alpha_prev;
*psi_beta = (vb_beta - ibeta * rs) + psi_beta_prev;
psi_alpha_prev = *psi_alpha;
psi_beta_prev = *psi_beta;
}
转矩估算:通过磁链和电流信号,估算电磁转矩。
void Torque_Estimation(float psi_alpha, float psi_beta, float ia, float ib, float *torque) {
float id = psi_alpha; // 简化假设
float iq = psi_beta; // 简化假设
*torque = 1.5 * (ia * iq); // 简化转矩公式
}
PI控制:实现磁链和转矩的PI控制。
void PI_Controller(float setpoint, float feedback, float *integral, float kp, float ki, float *output) {
float error = setpoint - feedback;
*integral += error;
*output = kp * error + ki * (*integral);
}
开关表选择:根据磁链和转矩误差,选择逆变器的电压矢量。
int Select_Switching_Vector(float flux_error, float torque_error) {
if (flux_error > 0 && torque_error > 0) return 1; // V1
if (flux_error > 0 && torque_error < 0) return 3; // V3
if (flux_error < 0 && torque_error > 0) return 5; // V5
if (flux_error < 0 && torque_error < 0) return 7; // V7
return 0; // 零矢量 V0
}
主控制循环:在主循环中实现DTC的完整流程。
void DTC_Control_Loop() {
float ialpha, ibeta, va_alpha, vb_beta;
float psi_alpha, psi_beta, torque_est;
// 1. Clarke变换
Clarke_Transform(ia, ib, ic, &ialpha, &ibeta);
// 2. 磁链估算
Flux_Estimation(ialpha, ibeta, va, vb, &psi_alpha, &psi_beta);
// 3. 转矩估算
Torque_Estimation(psi_alpha, psi_beta, ia, ib, &torque_est);
// 4. PI控制
PI_Controller(flux_ref, psi_alpha, &flux_integral, kp_flux, ki_flux, &flux_error);
PI_Controller(torque_ref, torque_est, &torque_integral, kp_torque, ki_torque, &torque_error);
// 5. 开关表选择
int vector_index = Select_Switching_Vector(flux_error, torque_error);
// 6. 生成PWM信号
Generate_PWM(voltage_vectors[vector_index][0], voltage_vectors[vector_index][1], voltage_vectors[vector_index][2]);
}
PWM生成函数:根据选择的电压矢量,生成PWM信号。
void Generate_PWM(float va, float vb, float vc) {
// 将电压值映射到PWM占空比
float duty_a = (va + 1.0) / 2.0; // 假设电压范围为[-1, 1]
float duty_b = (vb + 1.0) / 2.0;
float duty_c = (vc + 1.0) / 2.0;
// 设置PWM占空比(假设使用STM32 HAL库)
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, duty_a * 1000); // 假设PWM分辨率为1000
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, duty_b * 1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_3, duty_c * 1000);
}
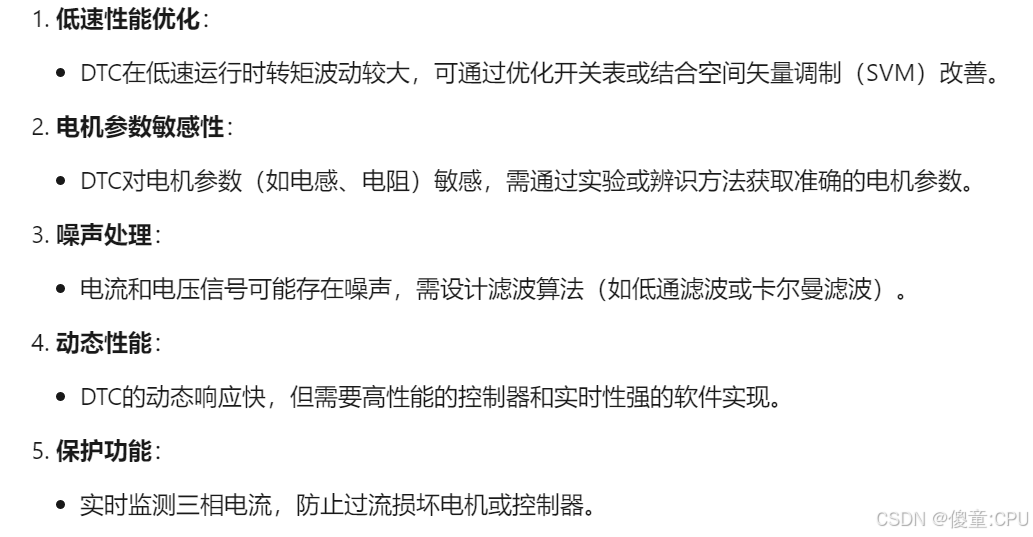
实际应用中的注意事项


















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











