







一、中断系统
1、中断:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行
2、中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源
3、中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回
二、STM32中断
1、68个可屏蔽中断通道,包含EXTI(外部中断)、TIM(定时器)、ADC(模数转换器)、USART(串口)、SPI(通信)、I2C(通信)、RTC(实时时钟)等多个外设
2、使用NVIC(嵌套中断向量控制器)统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级
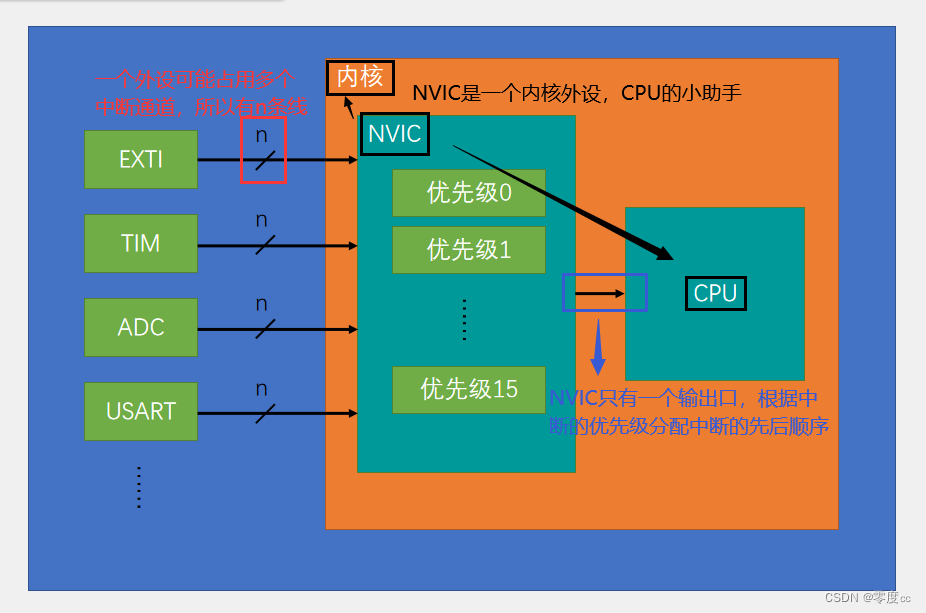
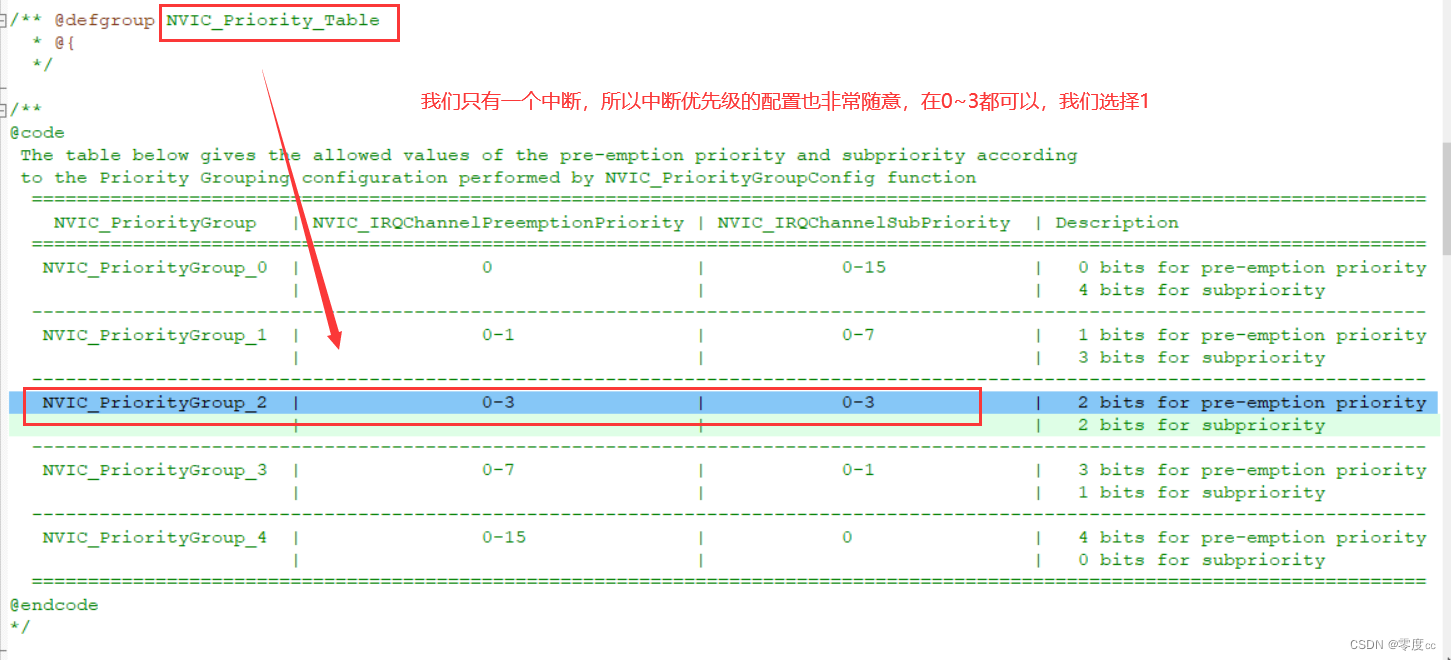
3、NVIC优先级分组
(1)NVIC的中断优先级由优先级寄存器的4位(0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级
(2)抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队
值越小,优先级越高,0就是最高优先级

三、EXTI(Extern Interrupt)外部中断
对于STM32来说。想要获取的信号是外部驱动的很快的突发信号,就可以考虑使用STM32的外部中断了,例如旋转编码器、红外遥控接收头
1、EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序
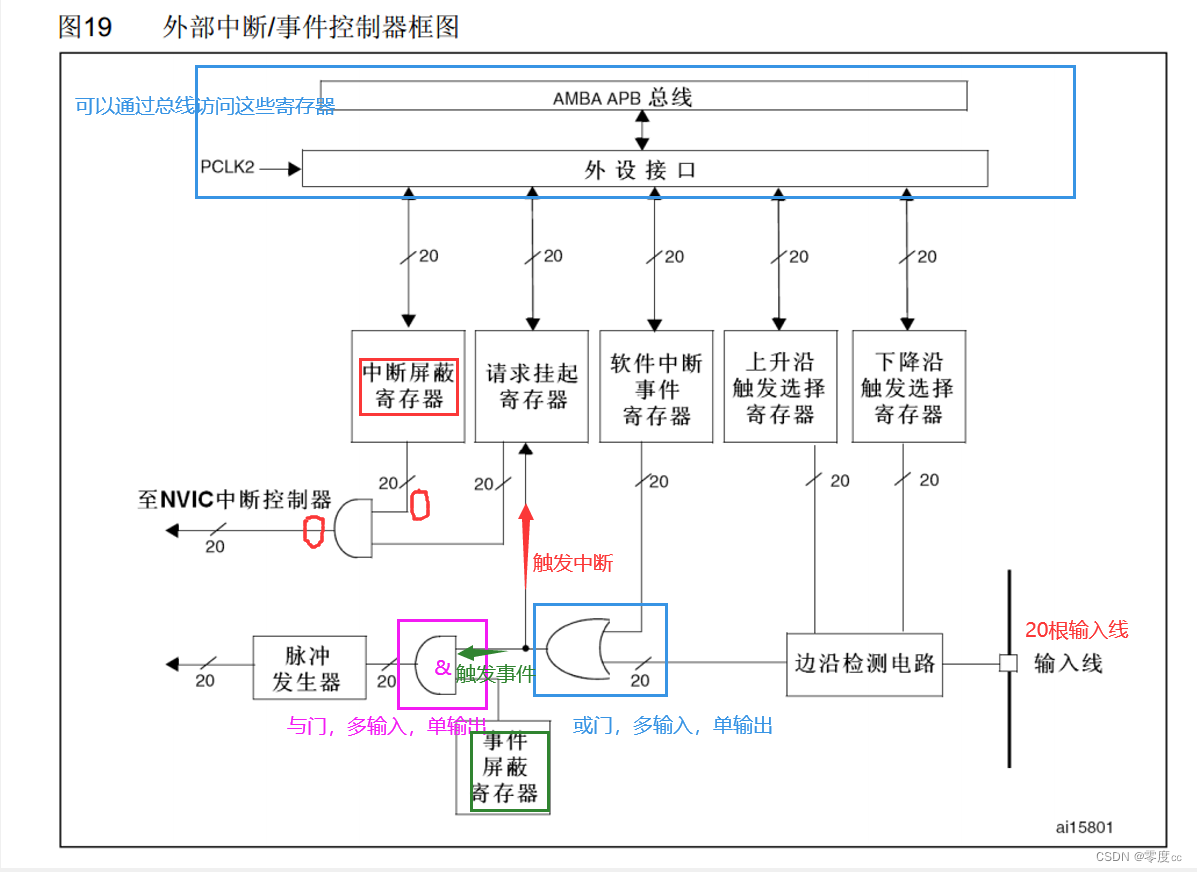
2、支持的触发方式:上升沿/下降沿/双边沿/软件触发
3、支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断
4、通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒
5、触发响应方式:中断响应(通向CPU)/事件响应(通向其他外设)
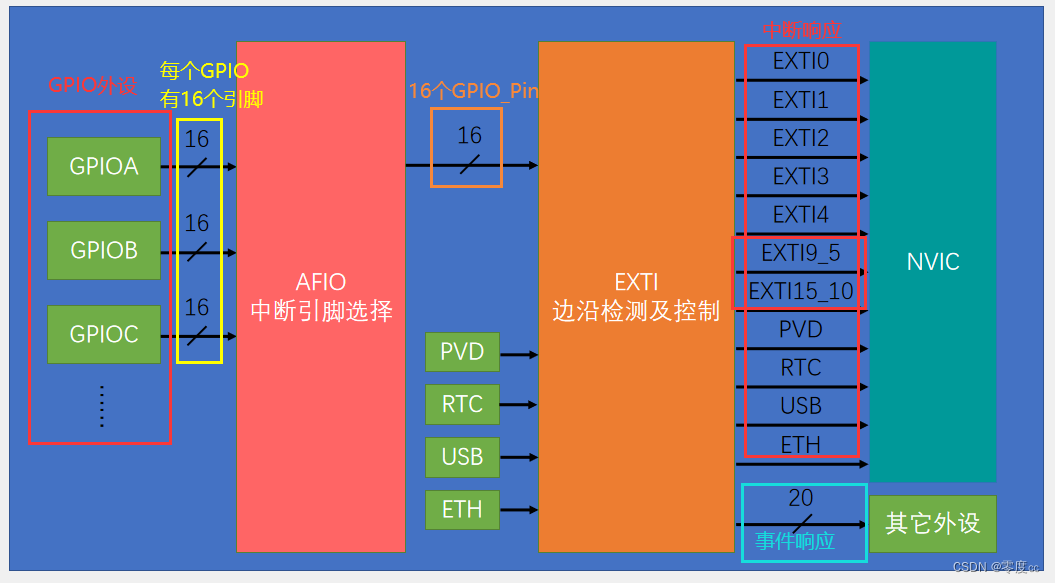
外部中断的信号从GPIO到AFIO,再到EXTI,再到NVIC,最终通向CPU,这样才能让CPU又主程序跳转到中断程序执行
6、AFIO复用IO口
(1)AFIO主要用于引脚复用功能的选择和重定义
(2)在STM32中,AFIO主要完成两个任务:复用功能引脚重映射、中断引脚选择

7、EXTI框图
四、旋转编码器简介
1、旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
2、类型:机械触点式/霍尔传感器式/光栅式


五、对射式红外传感器计次
1、按照以下接线方式连接,并将STLINK插到电脑上

2、对射式红外传感器驱动函数模块
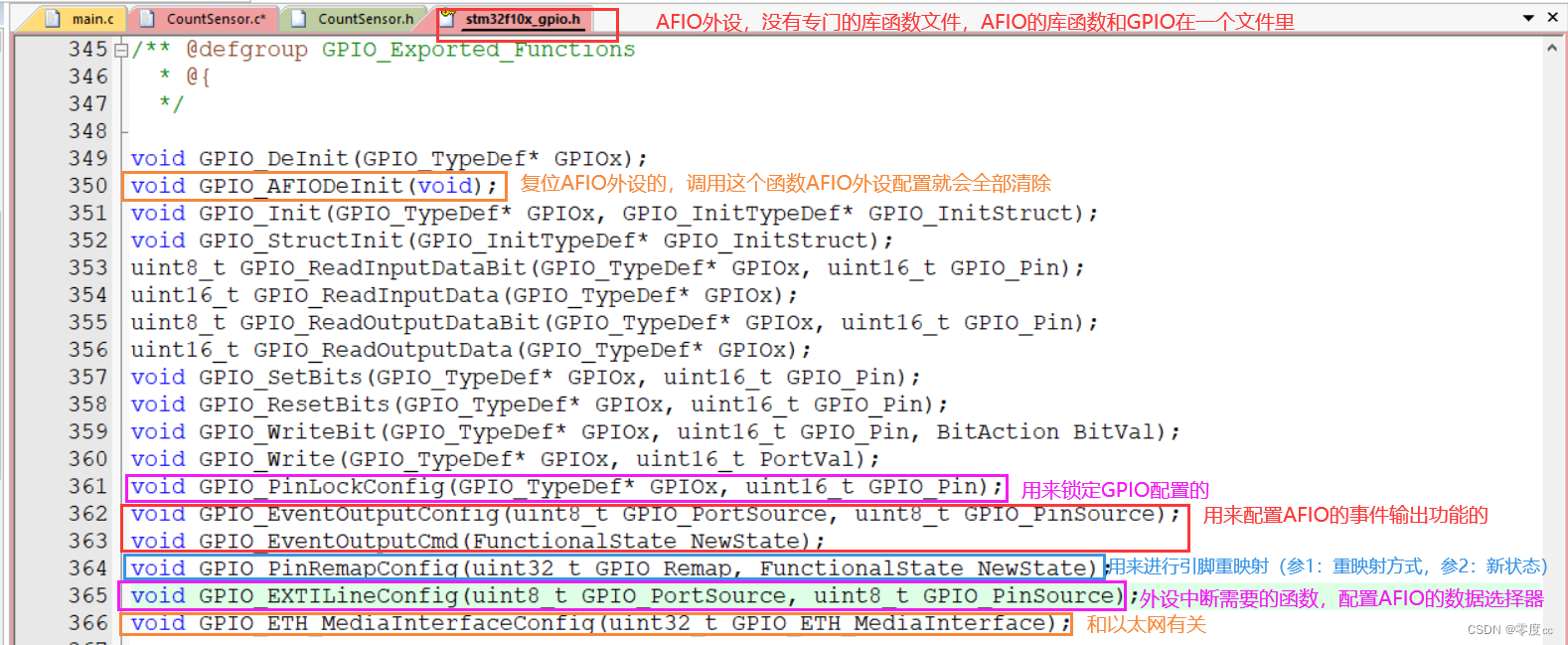
(1)AFIO库函数的功能
(2)EXTI库函数的功能

(3)NVIC库函数的功能

(4)NVIC配置的注意事项



(5)中断函数名

(6)CountSensor.c
#include "stm32f10x.h" // Device header
uint16_t CountSensor_Count;
/*
初始化函数
*/
void CountSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure; //配置GPIO
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入,上拉还是下拉是一样的效果
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14); //配置AFIO
EXTI_InitTypeDef EXTI_InitStructure; //EXTI配置
EXTI_InitStructure.EXTI_Line=EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling; //下降沿触发,移开挡光片触发中断
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC配置,2位抢占,2位响应
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
}
/*
返回计数变量
*/
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
/*
中断函数
*/
void EXTI15_10_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line14) == SET) //判断是否进入EXTI14
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0) //消抖,下降沿0,如果是上升沿1
{
CountSensor_Count++;
}
EXTI_ClearITPendingBit(EXTI_Line14); //清除中断标志位
}
}
(7)CountSensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSensor_Get(void);
#endif
3、编写main.c代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1,1,"Count:");
while(1)
{
OLED_ShowNum(1,7,CountSensor_Get(),5);
}
}
4、实现效果
视频是没有消抖之前的,所以加到3的时候,是没有遮挡的时候加了1(消抖后就不会出现这样的情况了)
对射式红外传感器计次
六、旋转编码器计次
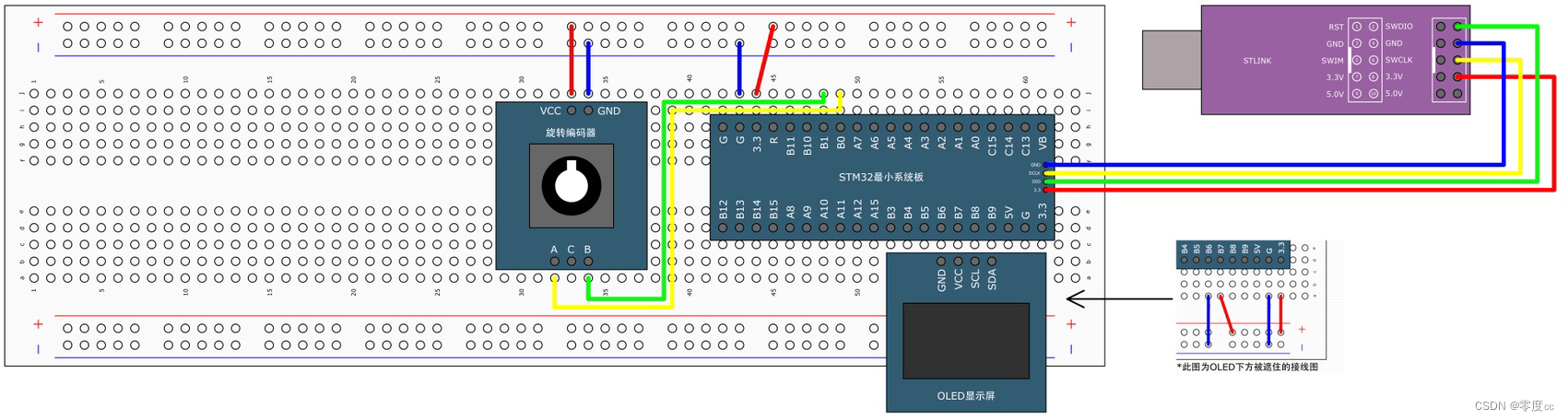
1、按照以下接线方式连接,并将STLINK插到电脑上
2、旋转编码器驱动函数模块
(1)Encoder.c
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure; //GPIO配置
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0); //APIO配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);
EXTI_InitTypeDef EXTI_InitStructure; //EXTI配置
EXTI_InitStructure.EXTI_Line=EXTI_Line0 | EXTI_Line1;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure; //NVIC配置
NVIC_InitStructure.NVIC_IRQChannel=EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel=EXTI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&NVIC_InitStructure);
}
int16_t Encoder_Get(void)
{
int16_t temp;
temp = Encoder_Count;
Encoder_Count=0;
return temp;
}
void EXTI0_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line0) == SET)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)
{
Encoder_Count--;
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) == SET)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == 0)
{
Encoder_Count++;
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
(2)Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endif
3、编写main.c代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1,1,"Num:");
while(1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1,5,Num,5);
}
}
4、实现效果
向左转减小,向右转增加
旋转编码器计次
七、中断编程建议
1、在中断函数里,最好不要执行耗时过长的代码,中断函数要简短快速
2、不要在中断函数和主函数操作调用相同的函数或者同一个硬件,尤其是硬件相关的函数
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









