







异构系统中的UUV、异构系统模型统一化及单应矩阵在异构系统中的应用
UUV发展趋势及关键技术
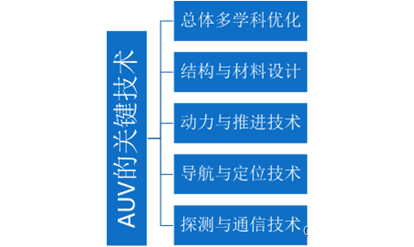
上一篇多智能体系统的发展、系统评价及部分文章方法中,我针对UAV、USV以及多智能体的发展进行了简要的描述,但在异构无人系统中还有一类成员UUV(unmanned underwater vehicle)。UUV作为一种主要以潜艇或水面舰艇为支援平台,可长期再水下自主航行并可回收的智能化装备,能够搭载多种传感器,专用设备或武器模块,执行特定的任务使命。根据自主性可将UUV分为(autonomous undersea vehicle,AUV)自主水下航行器和遥控水下航行器(remotelu operated vehicle. ROV)。对于AUV,其主要发展趋势与USV类似,包括系列化、集群化、体系化、大型化等。AUV设计到的关键技术有很多,从总体到具体,包括:总体多学科优化设计、结构与材料设计技术、导航与定位技术、探测与通信技术等。其中导航与定位技术中包括地形物理场导航技术、组合导航技术以及多AUV的协同导航等。令人印象深刻的是可以利用海底的地形、地磁甚至重力辅助导航。随着集群化、体系化的发展,各AUV如何在受限的通信链路条件下实现协同,是更迫切的问题。即使控制算法再精明、效率再高,通信不畅,也无法将信息传输到各个智能体上,实践难以进行。

异构编队系统编队
对于跨域异构编队,同济大学陈杰教授发表了《人工智能发展中的若干科学问题及颠覆性技术》报告,针对未来自主智能无人系统发展规划,提出了 3 个重点研究方向:自主感知与理解、决策与控制一体化、群知与协同控制。
所谓跨域异构无人系统编队是指为提升完成任务的能力,将 USV 与 UAV,UUV 整合到编队中,实现跨域多平台协同作业的一种编队模式。以 USV/UAV 跨域异构编队为例,UAV 的优点是视野广、通信限制小,但存在续航时间短的缺点,而 USV 的优势是续航时间长,但搜索范围有限。二者可以互补,即由 USV 运送 UAV 到指定海域,再由 UAV 获得良好视野,从而可弥补 UAV 续航时间短、USV 视野较差的缺点,提高异构编队执行上述任务的能力。
异构系统模型统一化
既然谈到异构编队系统,那么我们首先肯定要解决的问题是针对两种模型不同的系统,如何将模型统一成为一种形式,进而设计控制器那?
文献[3]中通过参考点的方法将无人艇与无人机的运动学模型在XY平面内处理成为统一形式,从而使得异构系统能够以一种形式表示,进而设计编队控制器。文献[4-6]与文献[3]类似,都是先通过坐标转换,引入虚拟控制量进而对异构系统进行编队控制器的设计。我们来举一个例子来说明:
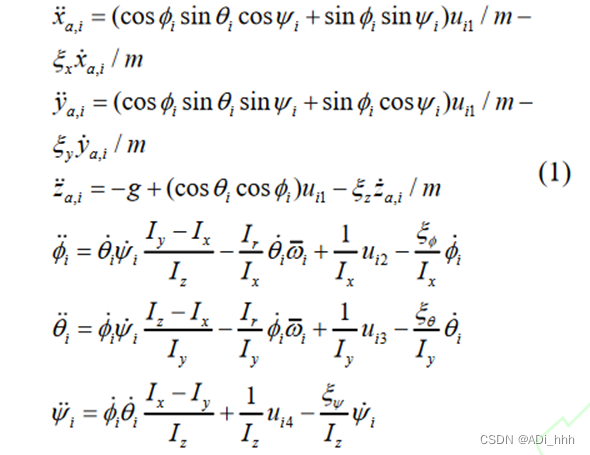
四旋翼无人机的模型如式(1)所示。
我们引入虚拟控制量:

并令,
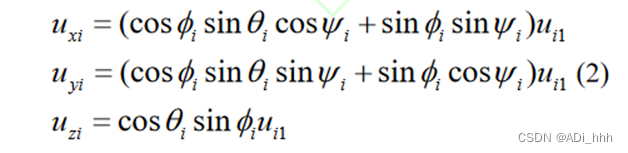
则可以得到
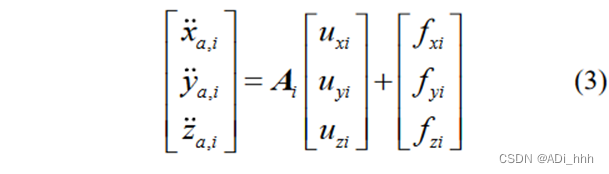
其中:
同样对另一异构模型,做同样的操作引入虚拟控制量,便可以得到如式(3)所示的形式,从而实现模型的统一化,为后续设计控制器奠定基础。
文献[7]中虽然也是首先统一异构系统的模型,但不同于前面文献[3-6]引入虚拟控制量的方式,文献[7]是通过选取合适的状态变量,将异构系统表示成形式一样的线性状态空间模型。当然上述可能只是处理异构系统模型不一样的基本方法。
解决了如何表示异构系统之间模型不同的问题,接下来就是对异构系统进行控制器的设计。但设计方法有很多,对于编队控制而言,除了经典的领导-跟随者法、虚拟结构法、基于图论法、基于行为法,文献[10]中还提到虚拟势场法、学习控制法以及混合控制法等。令我印象深刻的是基于势场法,把智能体运动比作电子在电场中运动,智能体在虚拟势场中的河里沿着最小势能方向运动。障碍物表现为斥力,目标点表现为引力。
单应矩阵在异构系统中的应用
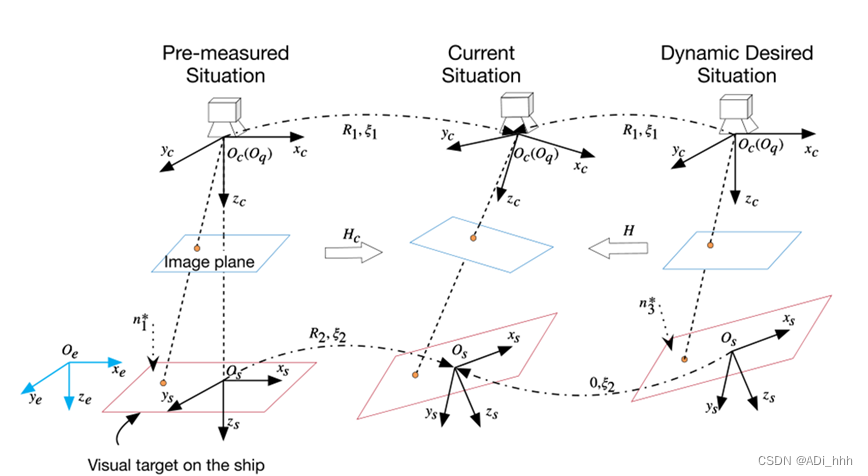
然而今天的重点并不是编队控制方法,而是利用UAV上常带的摄像机为基础,通过单应性矩阵方法变换平面物体之间的两个视图的变换信息。主要做法是在跟踪前获取设定的图像信息,在跟踪过程中,利用设定的图像信息和当前的图像信息计算出单应性矩阵Hc,再对该矩阵进行奇异值分解,得到UAV与船舶的相对旋转矩阵,从而为设计控制器提供依据。文献[8]中借助单应性分解技术,直接从当前图像和期望图像中重构出未知尺度因子的位姿误差,不需提前标定外部参数或已知目标物模型信息。文献[9]中采用视觉伺服的思想,采用单应矩阵来变换平面物体之间的两个视图的变换信息。文章采用分层控制的思想,分别设计内环和外环。但该论文中并未涉及船舶的控制,只是设定船舶为无人机跟踪的对象,那这算不算真正的异构协同那?
参考文献:
[1] 宋保维,潘光,张立川,黄桥高,于洋,田文龙,董华超,张新虎.自主水下航行器发展趋势及关键技术[J].中国舰船研究,2022,17(05):27-44.
[2] 徐博,王朝阳.基于无人艇跨域异构编队协同导航研究进展与未来趋势[J].中国舰船研究,2022,17(04):1-11+56.
[3] 白嘉琪,王彦恺,邢昊.无人艇与四旋翼无人机固定时间异构编队控制[J/OL].系统工程与电子技术:1-12.
[4] 马亚杰,王娟,姜斌,龚建业.一种无人机-无人车编队系统容错控制方法[J/OL].航空学报:1-14.
[5] Zhang B, Wang D, Wang J. Formation control for multiple heterogeneous unmanned aerial vehicles and unmanned surface vessels system[C]//2019 Chinese Automation Congress (CAC). IEEE, 2019: 4920-4925.
[6] Cheng W, Zhang K, Jiang B, et al. Fixed-time fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2021, 68(5): 2121-2133.
[7] 周思全,董希旺,李清东,任章.无人机-无人车异构时变编队控制与扰动抑制[J].航空学报,2020,41(S1):128-139.
[8] 何红坤,王宁.欠驱动无人船单目视觉伺服镇定控制[J].中国舰船研究,2022,17(05):166-174+183.
[9] Huang Y, Zhu M, Zheng Z, et al. Homography-Based Visual Servoing for Underactuated VTOL UAVs Tracking a 6-DOF Moving Ship[J]. IEEE Transactions on Vehicular Technology, 2021, 71(3): 2385-2398.
[10] 杨立炜,付丽霞,李萍.多智能体系统编队控制发展综述[J].电子测量技术,2020,43(24):18-27.















 1771
1771











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









