






前言
对于AGV小车,利用路径规划算法在规划好路径以后,全局路径由一系列路径点构成,这些路径点只要包含空间位置信息即可,也可以包含姿态信息。在上一篇文章中,我们在webots中创建了舵轮小车,在本文中,我们将利用纯追踪算法(Pure Pursuit)来对舵轮小车进行路径点追踪。
一、自行车模型

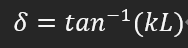
上图为几何学自行车模型,假设我们的自行车模型仅在平面上行驶。我们将四轮模型简化为两轮模型,我们可以计算出前轮转向角度δ与轴距L之间的关系:

R为在给定的转向角δ下后轴遵循着的圆的半径。
二、纯追踪算法

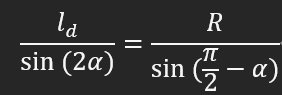
纯跟踪算法以车后轴为切点,车辆纵向车身为切线,通过控制前轮转角,使车辆可以沿着一条经过目标路点的圆弧行驶,如上图所示。上图中(g_x,g_y )是我们下一个要追踪的路点,它位于我们已经规划好的全局路径上,现在需要控制车辆的后轴经过该路点,表示车辆当前位置(即后轴位置)到目标路点的距离,表示目前车身姿态和目标路点的夹角,那么更具正弦定理我们可以推导出如下转换式:
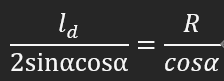
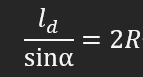
将上式变形可得:
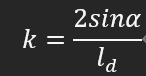
K为圆弧的曲率,前轮的转向角δ:
将以上两个式子结合,并且把时间考虑进来可得:
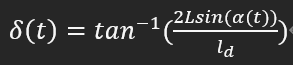
t时刻车身和目标路点的夹角 α(t)和距离目标路点的前视距离ld的情况下,由于车辆轴距L固定,我们可以利用上式估计出应该作出的前轮转角δ,为了更好的理解纯追踪控制器的原理,我们定义el 为车辆当前姿态和目标路点在横向上的误差,由此可得夹角正弦:
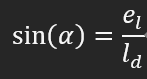
此时,圆弧弧度为:
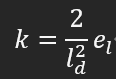
上式可知纯追踪控制器其实是一个横向转角的P控制器,其P系数为l_d^2,这个P控制器受到参数 ld(即前视距离)的影响很大,如何调整前视距离变成纯追踪算法的关键,通常来说,ld 被认为是车速的函数,在不同的车速下需要选择不同的前视距离。
三、Webots中对舵轮使用纯追踪算法
在Webots中新建一个控制器,代码如下:
代码如下(示例):
import time
import numpy as np
from controller import *
import math
robot = Robot()
timestep = int(robot.getBasicTimeStep())
lf_dir = robot.getMotor('lf_dir_motor')
lf_val = robot.getMotor('lf_run_motor')
lb_dir = robot.getMotor('lb_dir_motor')
lb_val = robot.getMotor('lb_run_motor')
rf_dir = robot.getMotor('rf_dir_motor')
rf_val = robot.getMotor('rf_run_motor')
rb_dir = robot.getMotor('rb_dir_motor')
rb_val = robot.getMotor('rb_run_motor')
gps = robot.getGPS("gps")
gps.enable(timestep)
pen = robot.getPen("pen")
k = 0.00001
Lfc = 0.1
Kp = 1.0
dt = 0.032
L = 0.5
# tr_ = 180/3.1415926
def rotation(angle):
lf_dir.setPosition(angle)
lb_dir.setPosition(angle)
rf_dir.setPosition(angle)
rb_dir.setPosition(angle)
def translation():
lf_val.setPosition(float('inf'))
lf_val.setVelocity(leftSpeed)
lb_val.setPosition(float('inf'))
lb_val.setVelocity(leftSpeed)
rf_val.setPosition(float('inf'))
rf_val.setVelocity(rightSpeed)
rb_val.setPosition(float('inf'))
rb_val.setVelocity(rightSpeed)
class VehicleState:
def __init__(self, x=0.0, y=0.0, yaw=0.0, v=0.0):
self.x = x
self.y = y
self.yaw = yaw
self.v = v
def update(state, a, delta):
state.x = state.x + state.v * math.cos(state.yaw) * dt
state.y = state.y + state.v * math.sin(state.yaw) * dt
state.yaw = state.yaw + state.v / L * math.tan(delta) * dt
# 航向角=后轴瞬时速度*tan前轮转角/轴距
state.v = state.v + a * dt
return state
def PControl(target, current):
a = Kp * (target - current)
return a
def calc_target_index(state, cx, cy):
dx = [state.x - icx for icx in cx]
dy = [state.y - icy for icy in cy]
d = [abs(math.sqrt(idx ** 2 + idy ** 2)) for (idx, idy) in zip(dx, dy)]
ind = d.index(min(d))
L = 0.0
Lf = k * state.v + Lfc
while Lf > L and (ind + 1) < len(cx):
dx = cx[ind + 1] - cx[ind]
dy = cx[ind + 1] - cx[ind]
L += math.sqrt(dx ** 2 + dy ** 2)
ind += 1
return ind
def pure_pursuit_control(state, cx, cy, pind):
ind = calc_target_index(state, cx, cy)
if pind >= ind:
ind = pind
if ind < len(cx):
tx = cx[ind]
ty = cy[ind]
else:
tx = cx[-1]
ty = cy[-1]
ind = len(cx) - 1
alpha = math.atan2(ty - state.y, tx - state.x) - state.yaw # 计算当前点到目标点的方向角差
if state.v < 0:
alpha = math.pi - alpha
Lf = k * state.v + Lfc
delta = math.atan2(2.0 * L * math.sin(alpha) / Lf, 1.0) # 计算转向角
return delta, ind
cx = np.arange(0, 50, 1)
cy = [math.sin(ix / 5.0) * ix / 2.0 for ix in cx]
target_speed = 2.0 / 3.6
T = 1000.0
state = VehicleState(x=-0.0, y=-0.0, yaw=0.0, v=2.0)
lastIndex = len(cx) - 1
time = 0.0
# print(state.x)
# print("Hello World")
x1= [state.x]
y1 = [state.y]
yaw1 = [state.yaw]
v1 = [state.v]
t1 = [0.0]
target_ind = calc_target_index(state, cx, cy)
while robot.step(timestep) != -1:
ai = PControl(target_speed, state.v)
di, target_ind = pure_pursuit_control(state, cx, cy, target_ind)
print("di:", di)
state = update(state, ai, di)
print("yaw:", state.yaw)
time = time + dt
x1.append(state.x)
y1.append(state.y)
yaw1.append(state.yaw)
v1.append(state.v)
t1.append(time)
values = gps.getValues()
e_node = [-100000000000000, 60000000000000]
x = values[0]
y = values[1]
if x > e_node[0] and y < e_node[1]:
leftSpeed = 20.0
rightSpeed = 20.0
else:
leftSpeed = 0.0
rightSpeed = 0.0
rotation(di)
translation()
pen.write(True)
print("MY_ROBOT is at position: %g %g %g" % (values[0], values[1], values[2]))
更多内容请关注微信公众号:深度学习与路径规划

参考文献:https://blog.csdn.net/AdamShan/article/details/80555174















 4179
4179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









