








Webots建模
我们首先要过一遍官方指导,了解node的相关概念:下图为一个solid node
一个有物理效果的实体(重力,碰撞)就必须有boundingObject ,shape,physics节点组成
多个solid可以在children目录通过自身相对上级节点的坐标变换串接起来
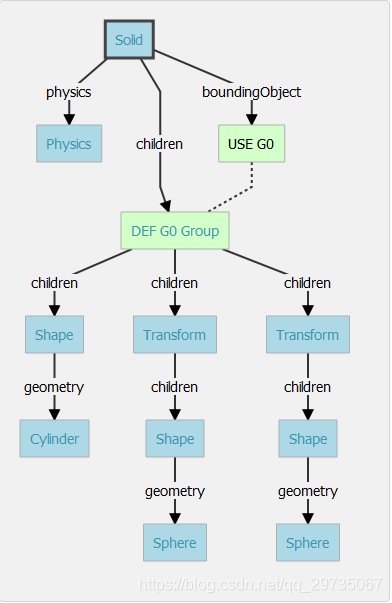
一个实体主要要由boundingObject ,shape,physics 即物理属性 碰撞绑定形状,形状组成
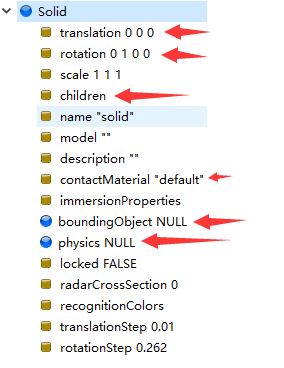
箭头从上到下依次是:
坐标变换:参考坐标系为上一级坐标系(如果是再树中建立,就是以世界坐标系为参考,如果再children目录中的solid及其派生节点,则是以children的坐标原点变换(点击children目录就可以看到其对应的坐标系))
rotation:四个参数,前三个定义一根旋转轴,第四个为角度
children:子节点用来连接其他东西,
contactMaterial:接触材质,在树最开始的worldInfo中设置
参数相关含义即英文含义,这里主要定义接触材质名称,和摩擦系数
boundingObject:绑定碰撞形状,参考官方例程。
physics:物理参数,参考官方例程:如果其为空(NULL),其所在节点将不会移动,参考示例中的场地墙的案例
机器人建模需要的Robot节点和solid节点基本相同这里就不再说明
开始修改模型
我们直接修改官方示例:
需要更改的项目将用其他颜色标出
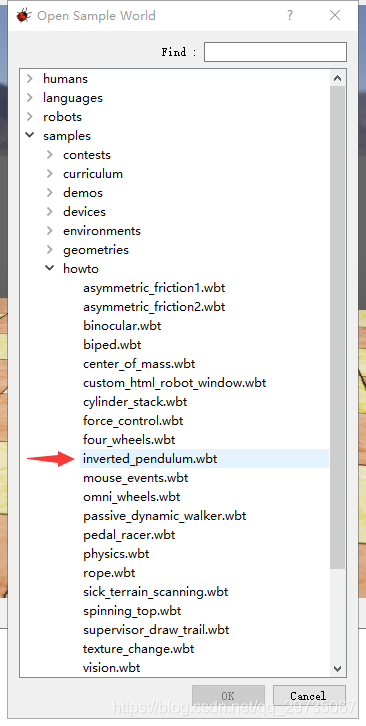
我们将其另存为新后就可以开始更改

蓝绿色的字表示值是非默认值
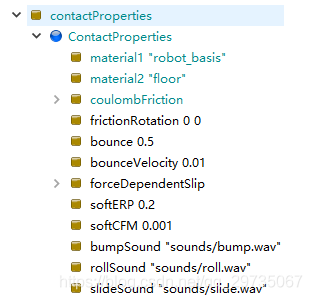
contactProperties:定义接触面的相关参数
material:接触面名称
coulombFriction:摩擦系数
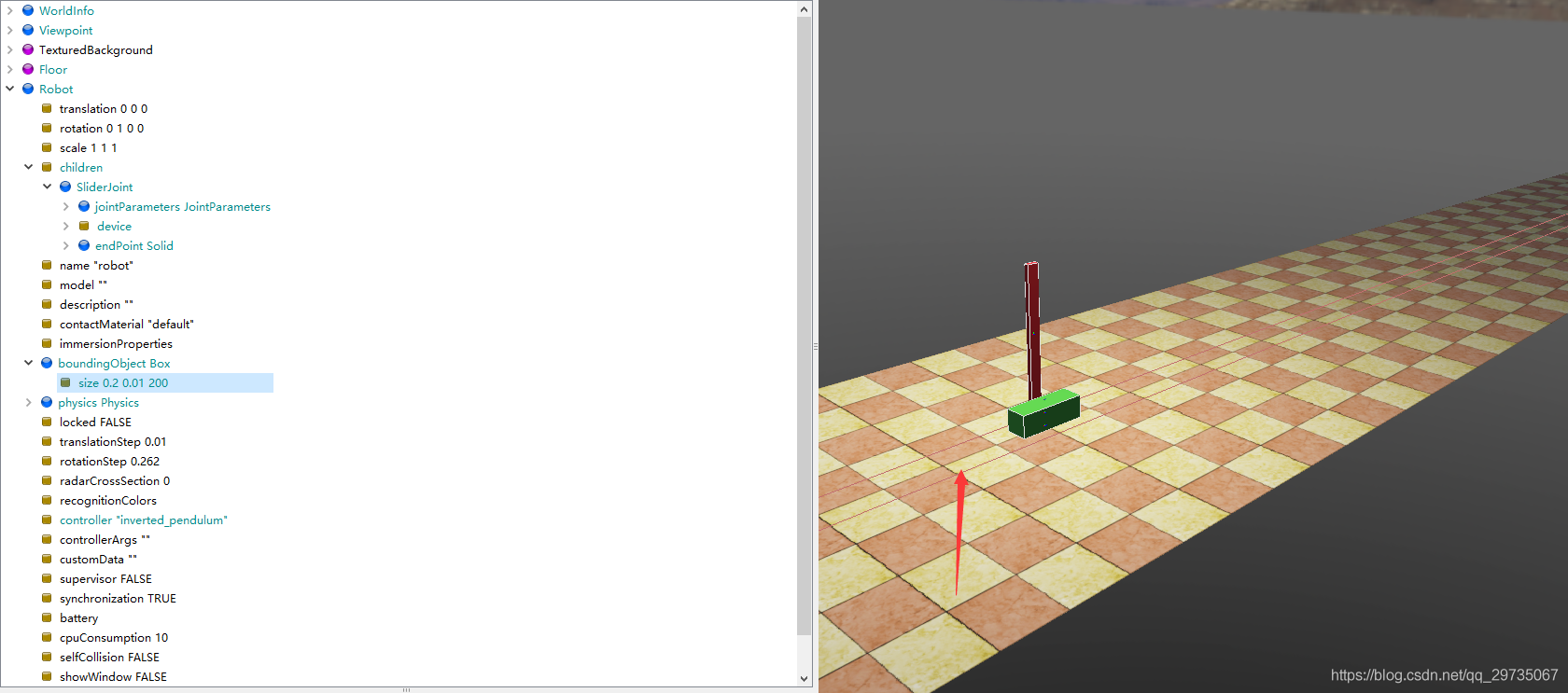
我们可以看到官方例程里的碰撞绑定为图中红色箭头指示的红色框;我们要将它和下面的物理属性删掉;
因为不知道什么原因,这里设置的质量会影响LQR控制器的控制;比如本来小车只有1KG的质量,但是如果你要在计算状态空间方程时小车质量 设为1KG 控制器控制的小车就会飞掉。
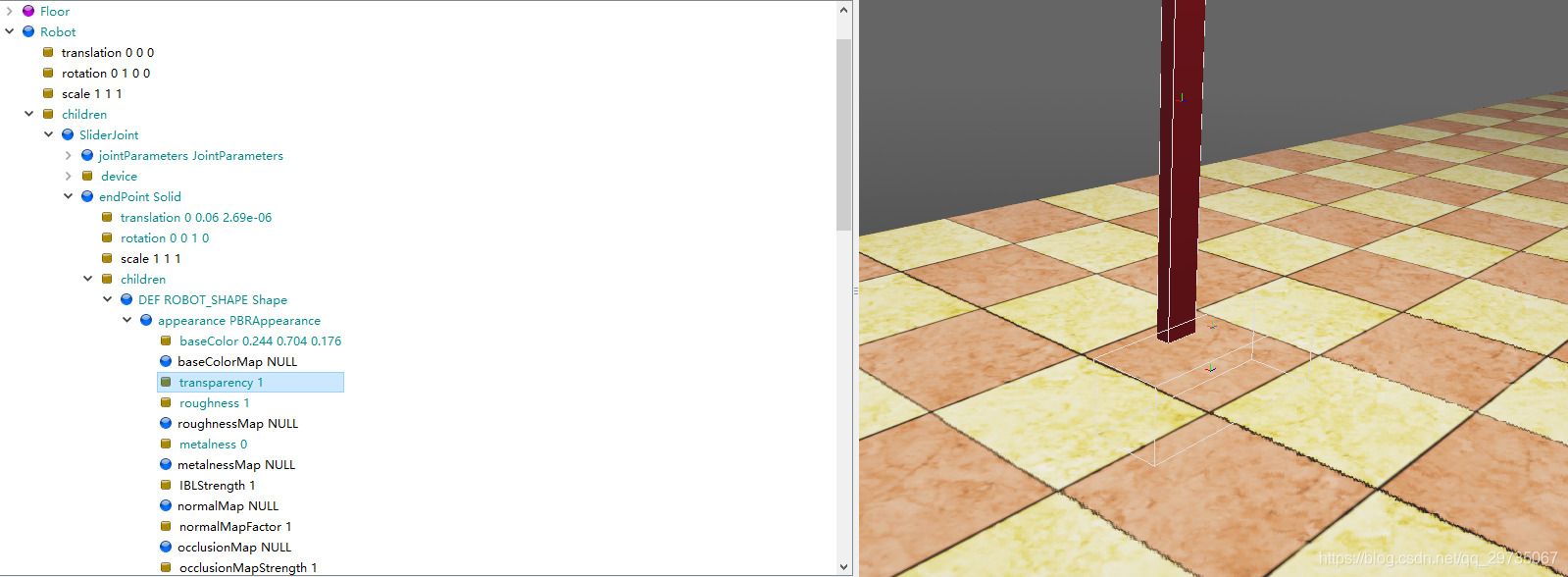
修改小车材质,使其透明 方便后续
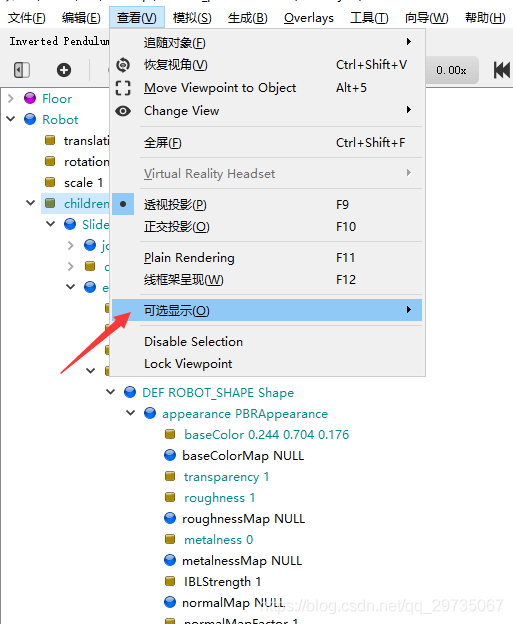
在其中选择 show joint axis 显示关节轴,可以看到其中会有两条条黑线:
其他显示参数自行调整
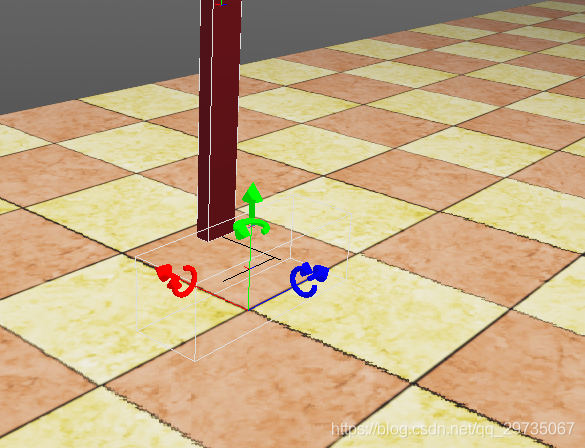
蓝色箭头方向的为小车导轨,红色箭头方向的就是摆杆的转轴。白色线框为小车碰撞边界
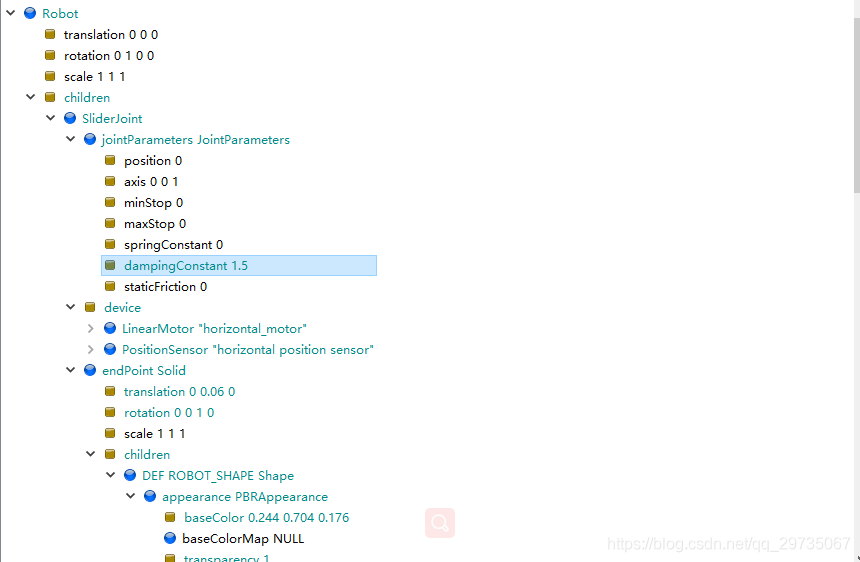
SliderJoint :线性驱动器,参数名称就是英文本意 ,从上到下为
关节参数:关于初始位置,方向 ,限位,弹簧参数,阻尼系数
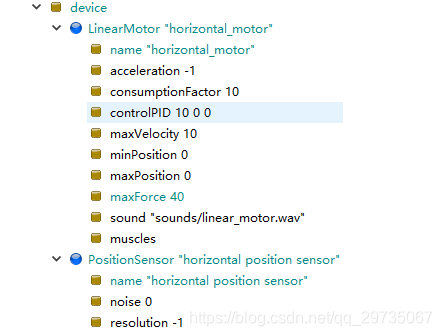
驱动器:线性马达,位置传感器,要记住驱动器名称 后期的控制器需要它来调用API
现在可以看到:
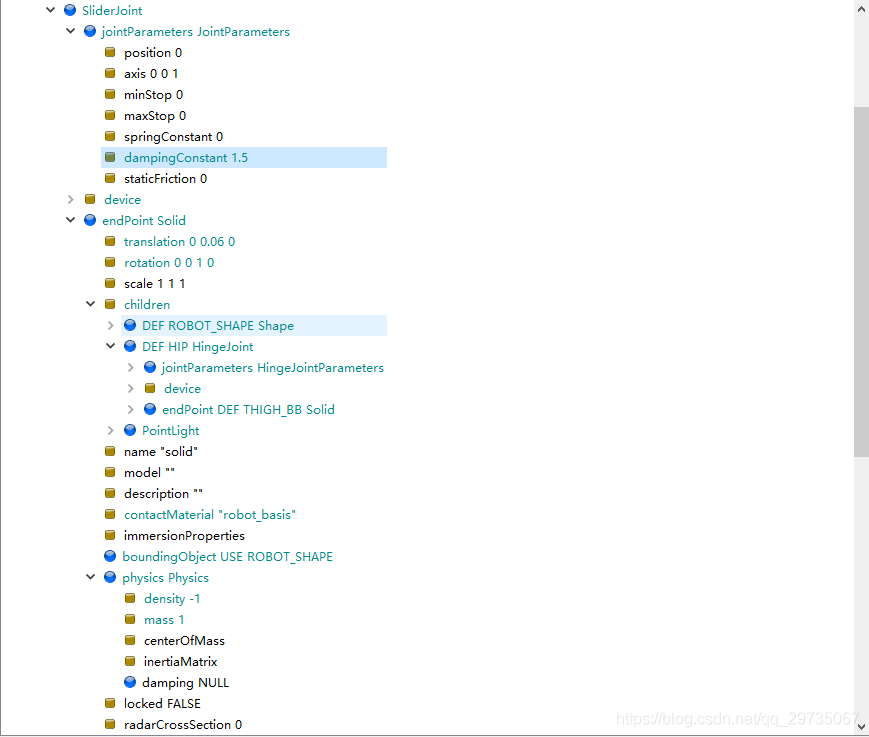

箭头所指的有一个颜色较暗的小坐标系,这个是一个solid 节点质心的标志,它的位置明显不对劲
我们可以看到线性驱动器的endPoint的物理属性,形状和碰撞边界表现为小车,centerofmass为默认,没有偏移,所以这个节点的坐标系原点应该是摆杆的质心,其质量为1KG
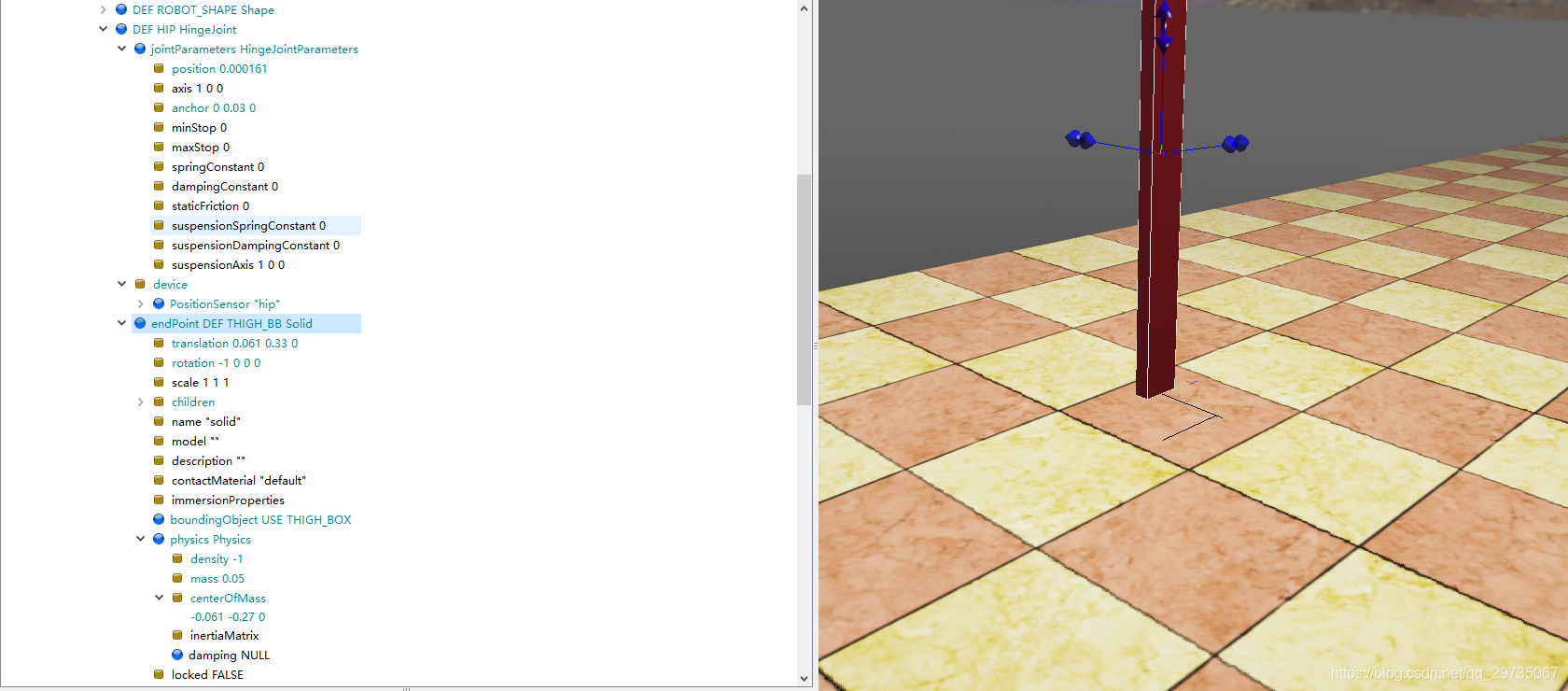
我们将转动关节HIP 的关节参数的position(初始位置)改为0,方便读取后续坐标值,
anchor:转轴原点,改不改对本例没有影响。
可以看到 图中大号坐标系为转动关节endpoint 的坐标系,其参考坐标系为上级,(即滑动关节endpoint),有兴趣的可以自己改下参数观察。
我们看下面物理参数部分,centerOFMass有值,y=-0.27 就是以endpoint为参考,我们将其删掉,或回复默认值

这样质心就会和endpoint solid的坐标系重合,质心离转轴等于摆杆的坐标系Y轴数值
如果要修改摆杆长度,需要先修改endpoint的坐标变换,在修改其children中的shape相关。
倒立摆控制率及属性模型参考https://zhuanlan.zhihu.com/p/54071212
这里仅给出状态空间方程:
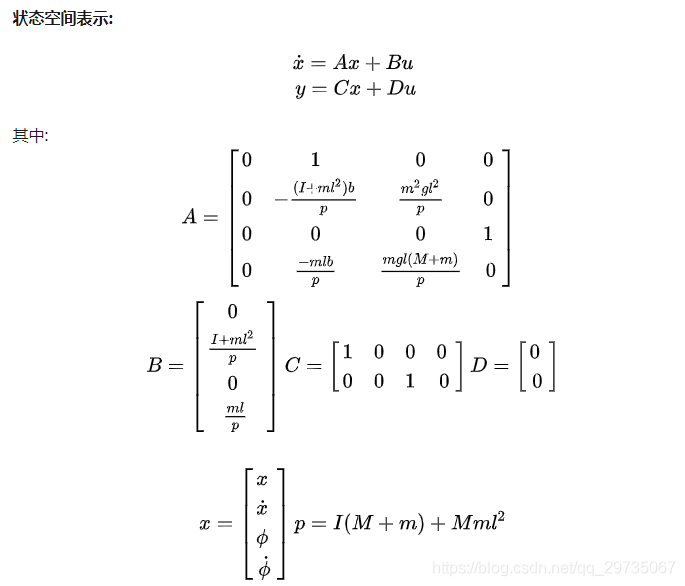
其中q:

控制器输入U=-[K1 K2 K3 K4] X
X=[X,X_DOT,TH,TH_DOT],
K矩阵由matlab的LQR函数算出 代码参照上述链接
控制器主要通过传感器获取位置和角度信息,计算状态变量,传给控制率来控制小车实现平衡。
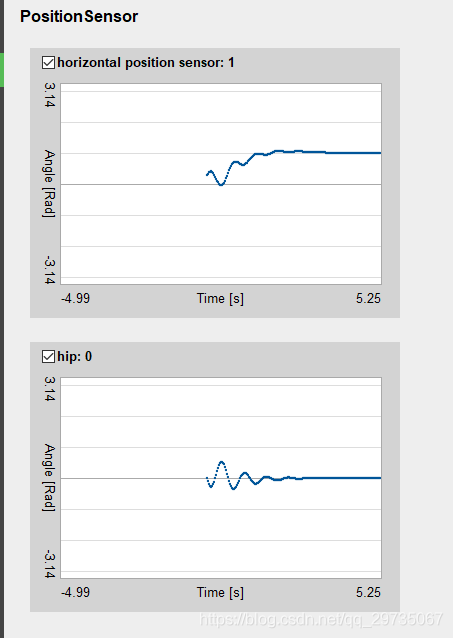
这是控制效果,位置设置为1














 1530
1530











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









