







第九章-PID整定方法
9.1-调整合适的采样周期和PID调参方法
正如之前所说,现在我们PID控制函数是在主函数中循环调用,这样的调用方式并不能保证实时性,不能保证周期得到调用
所以我们要把PID控制函数放到中断里面定时执行,那么如何放到中断里面执行,执行的周期是多少合适那?

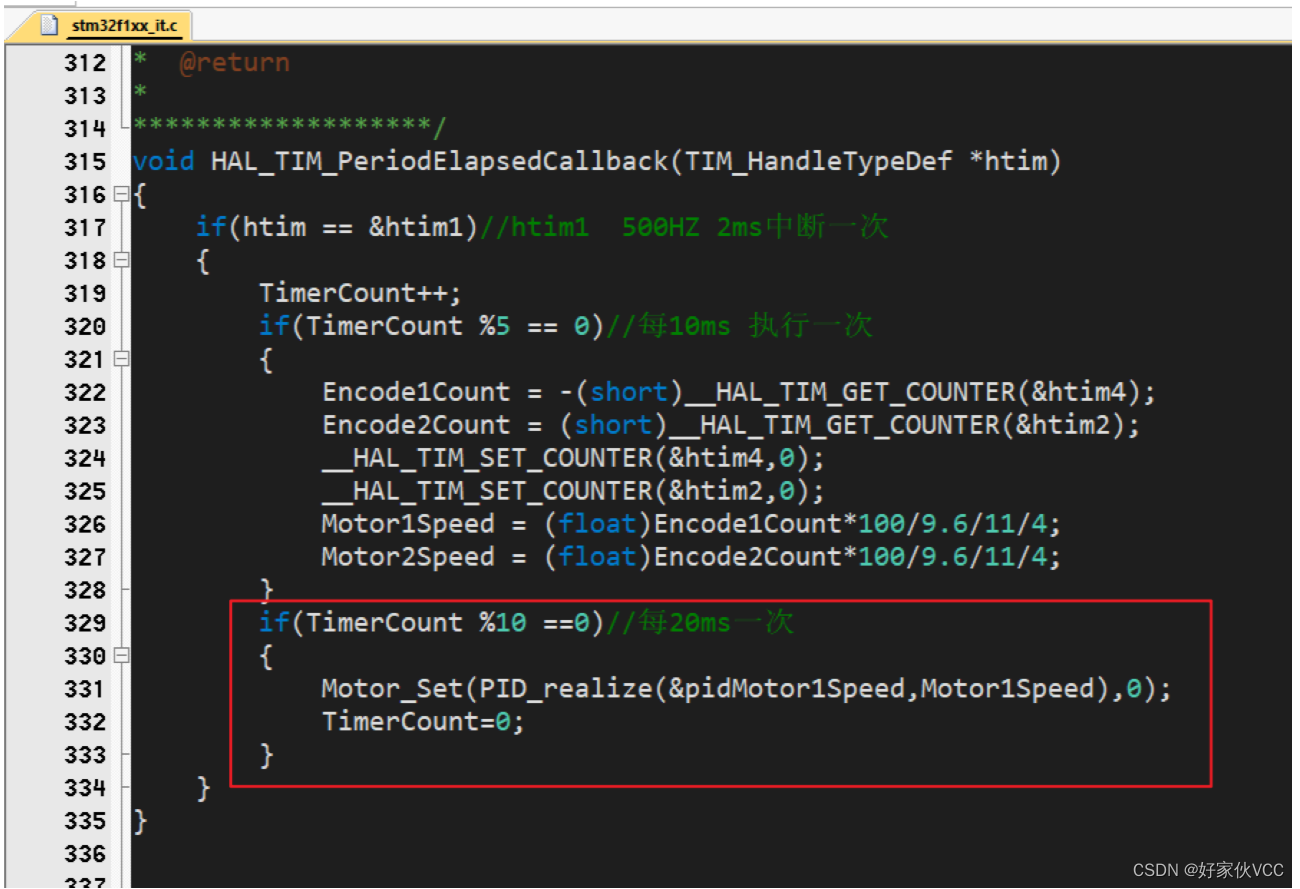
if(TimerCount %10 ==0)//每20ms一次
{
Motor_Set(PID_realize(&pidMotor1Speed,Motor1Speed),0);
TimerCount=0;
}
}
烧录测试一下,是否可以改变波形和调整参数
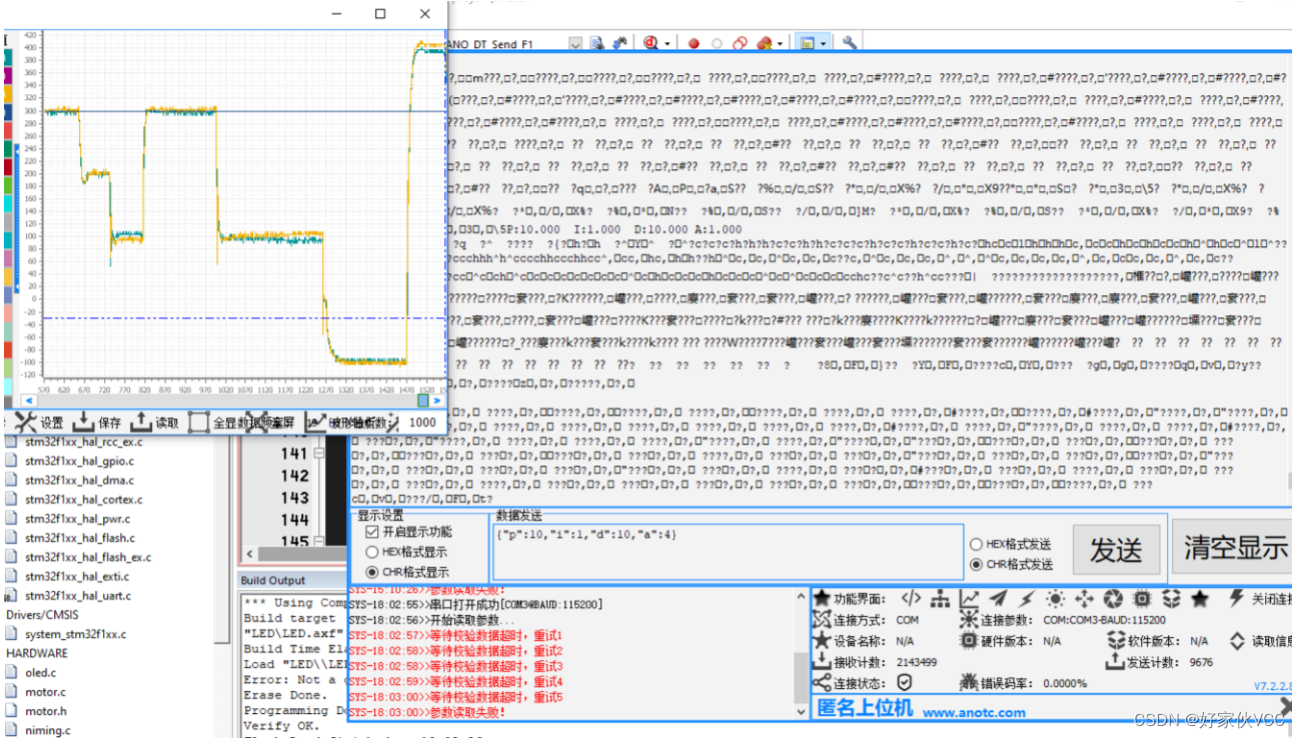
借助上位机调节PID
- 调节P 把I=0、D=0先给正值或负值值测试P 正负、然后根据PID函数输入和输出估算P 大小,然后I=0 D=0去测试,调节一个较大值
- 调节I 把P等于前面的值 然后测试I给较大正值和负值 测试出I正负,然后I从小值调节,直到没有偏差存在
- 一般系统不使用D
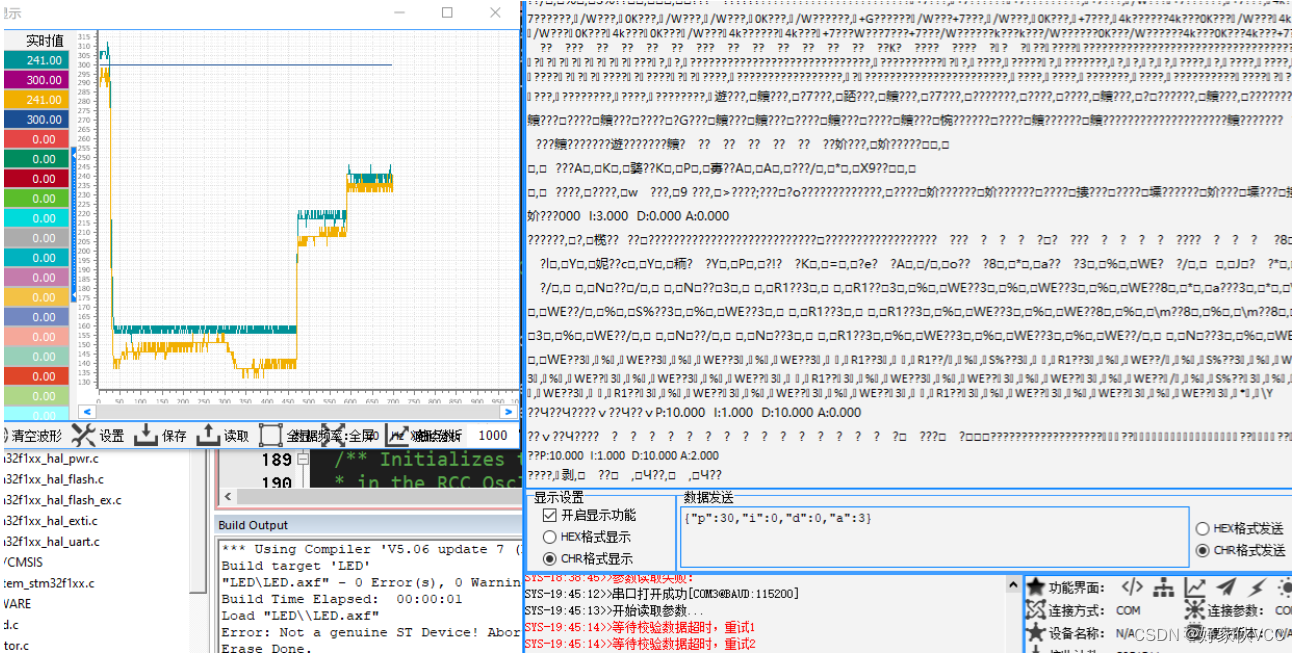
然后当前系统特点 :I 对于系统更重要
下面我们调节I
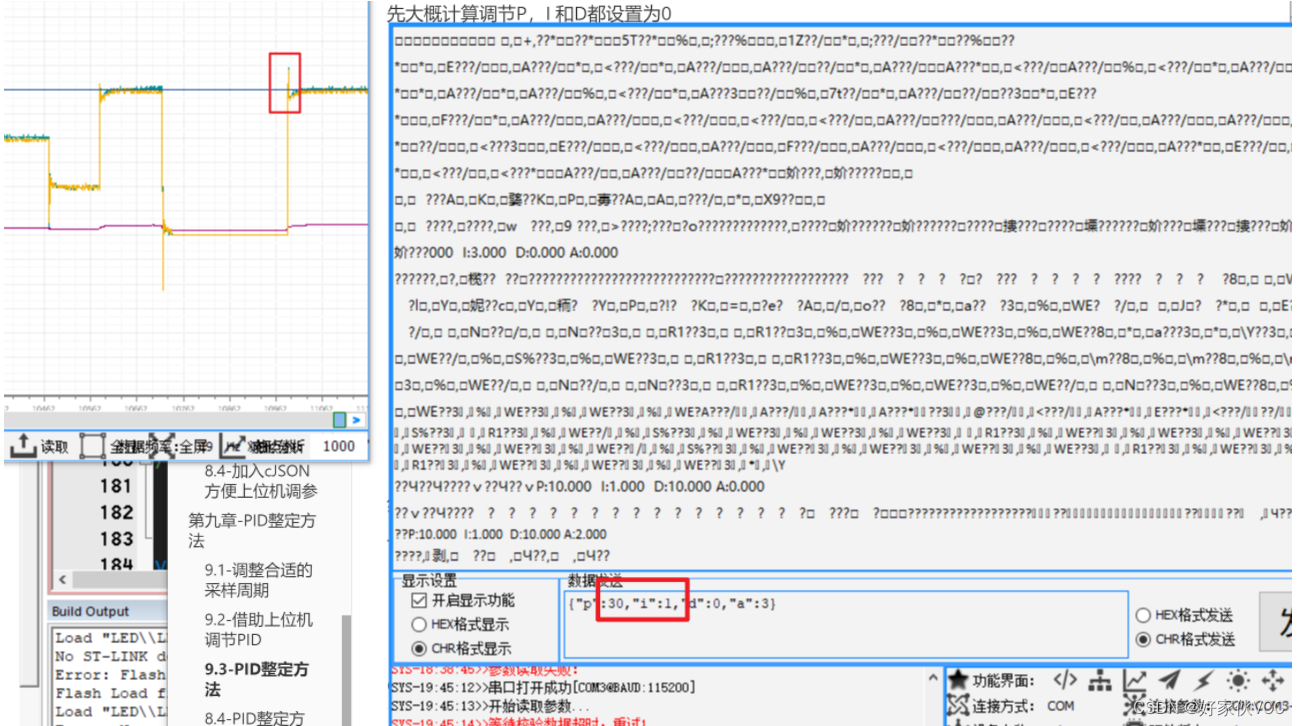
给一个较小的i 发现 有一个大的超调,我们就减少p 、减小一半p
下面是减少一半p 的效果
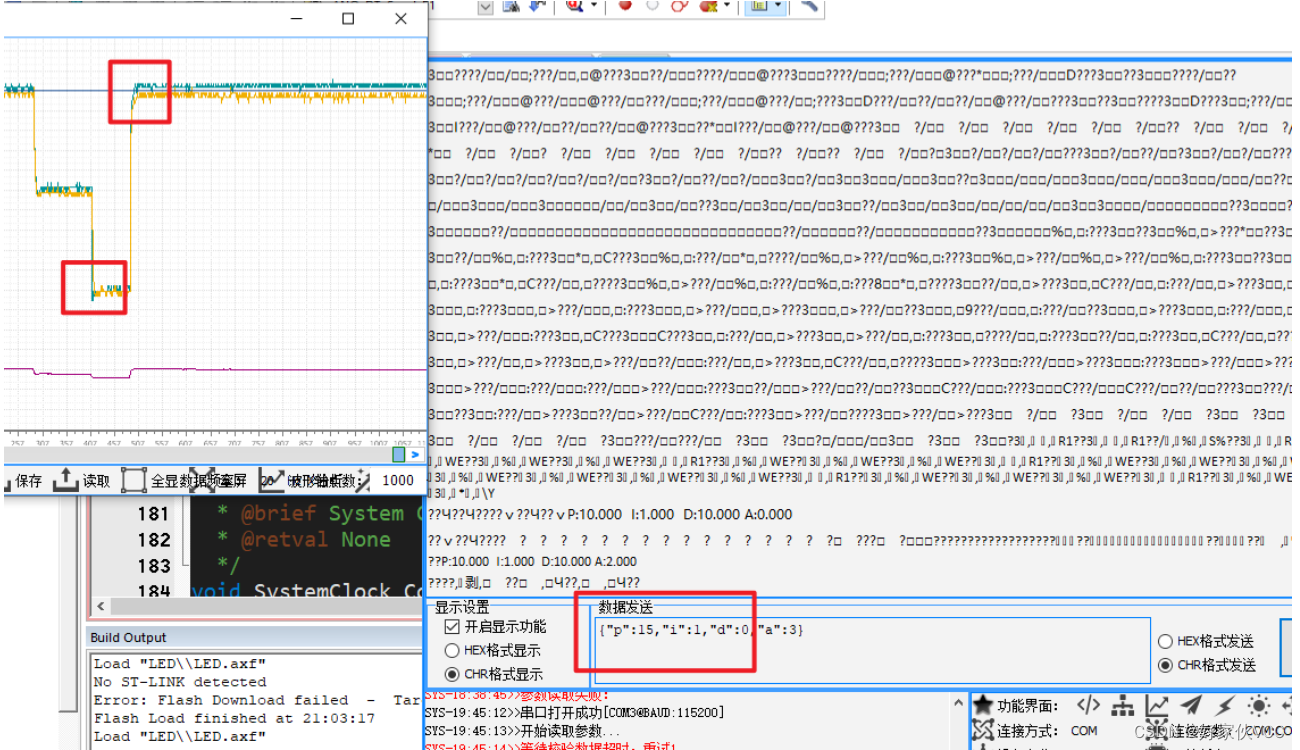
这个效果还可以
整理双电机速度控制
首先我们的需要是控制两个电机,那么这两个电机的特点不同,他们的P I D 参数不同,要控制不同的目标速度,那么他们的目标值、实际值、偏差等都会不同,所以我们的PID函数就要能够根据输入参数控制电机
我们增加tPid 类型函数的定义用于控制电机
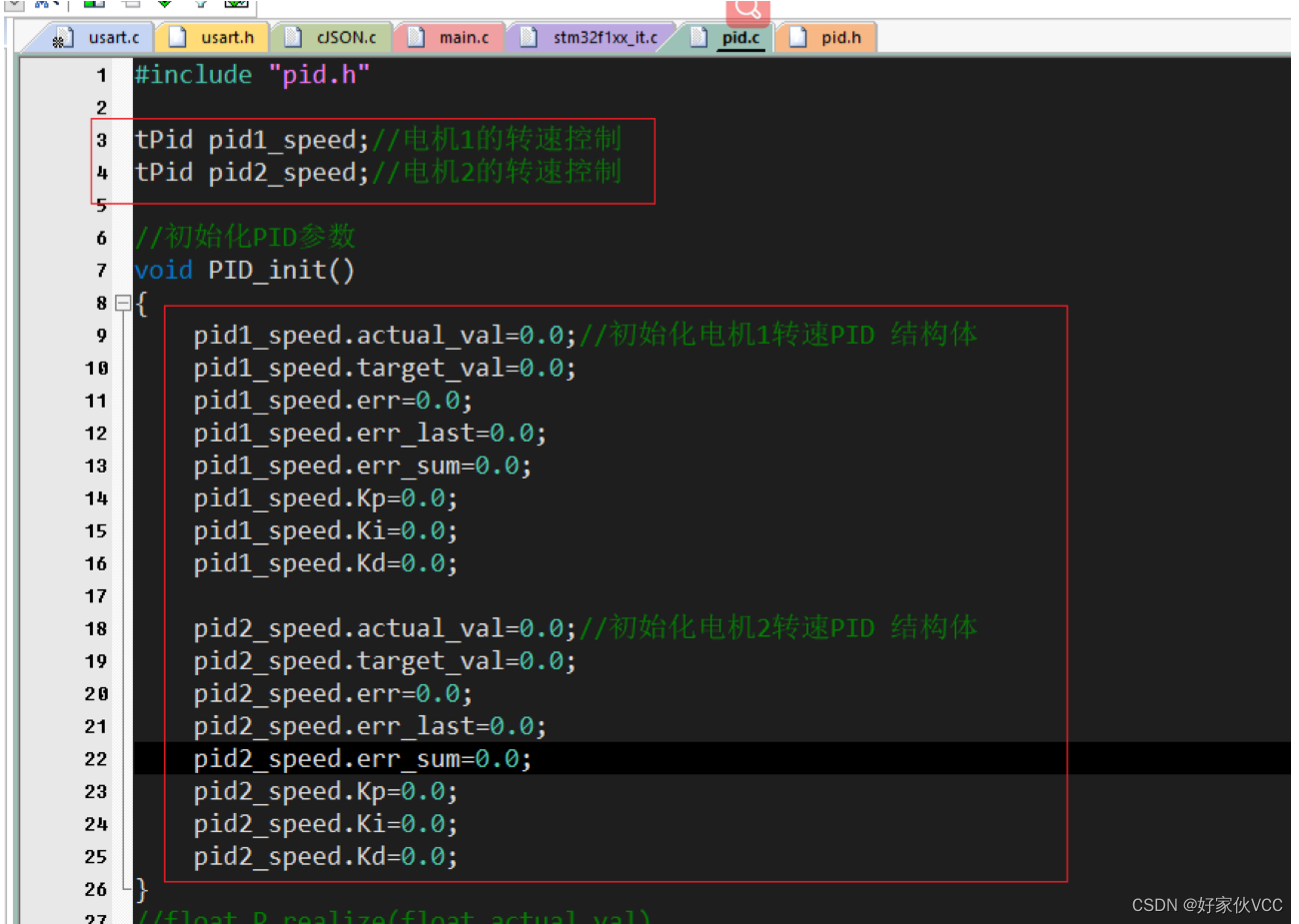
tPid pid1_speed;//电机1的转速控制
tPid pid2_speed;//电机2的转速控制
//初始化PID参数
void PID_init()
{
pid1_speed.actual_val=0.0;//初始化电机1转速PID 结构体
pid1_speed.target_val=0.0;
pid1_speed.err=0.0;
pid1_speed.err_last=0.0;
pid1_speed.err_sum=0.0;
pid1_speed.Kp=0.0;
pid1_speed.Ki=0.0;
pid1_speed.Kd=0.0;
pid2_speed.actual_val=0.0;//初始化电机2转速PID 结构体
pid2_speed.target_val=0.0;
pid2_speed.err=0.0;
pid2_speed.err_last=0.0;
pid2_speed.err_sum=0.0;
pid2_speed.Kp=0.0;
pid2_speed.Ki=0.0;
pid2_speed.Kd=0.0;
}
更改一下PID函数,这里我们使用结构体作为函数地址
访问因为是地址,访问结构体变量要用->
float PID_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//目标值减去实际值等于误差值
pid->err_sum += pid->err;//误差累计求和
//使用PID控制
pid->actual_val = pid->Kp*pid->err + pid->Ki*pid->err_sum + pid->Kd*(pid->err - pid->err_last);
//保存上次误差:最近一次 赋值给上次
pid->err_last = pid->err;
return pid->actual_val;
}
更改主函数,对PID函数的使用
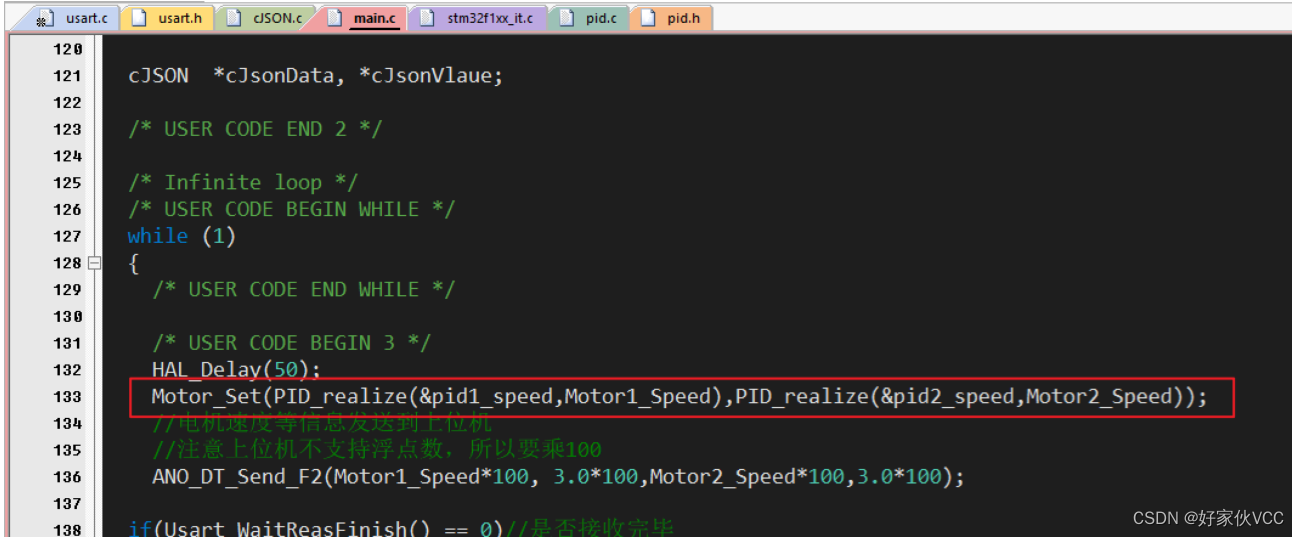
然后可以分别调节电机1的参数和电机二的参数
把测试好的PID 参数分别写在PID_init里面
以上是入门篇
通过上面的学习与实操,大家对:PWM、电机驱动、PID闭环控制、串口通信等有了一定掌握,如果上面那个章节掌握不好,一定要多看两遍视频,多敲边代码,还有疑惑可以百度查找或者留言问题。
后面的内容就是偏应用比较简单了。
这样咱们第九章就结束了,PID就完成了,后面的章节利用PID做小车控制。















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









