






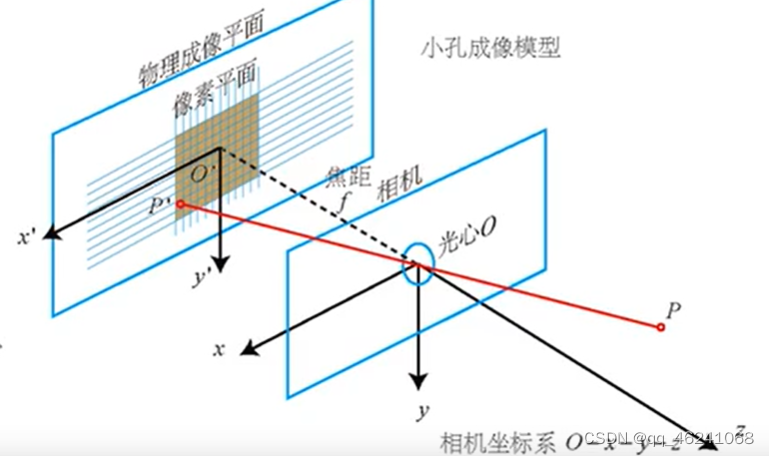
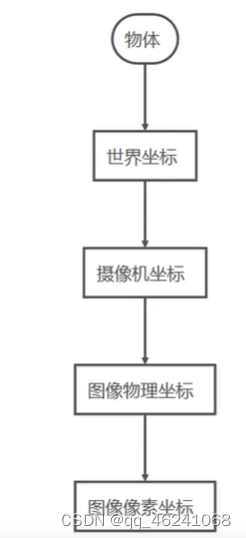
针对相机模型存在4个坐标系,分别是世界坐标系,相机坐标系,图像坐标系,像素坐标系。成像原理需要明白4个坐标系之间的转换,实现P(世界坐标系位置)三维到P'(成像后的像素坐标系位置)2维之间的转换。
P对应现实物体在世界坐标系中的位置,世界坐标系可以任意选择,为假想坐标系。单位为长度单位。
相机坐标系以相机光心Po为原点,以平行于图像的x,y方向为x轴,y轴。z轴与光轴平行。单位为长度单位。
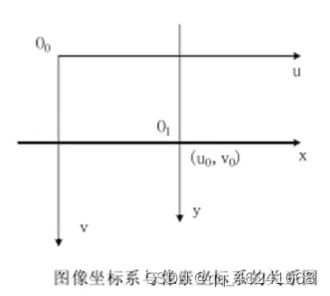
图像物理坐标系,以光轴和图像平面交点为坐标原点,x'和y'方向如图所示,单位为长度单位。
像素坐标系,以图像顶点为坐标原点,u和v方向与x',y'平行。单位以像素为单位。
转换流程:
首先是世界坐标系到相机坐标系之间的转换。如图:
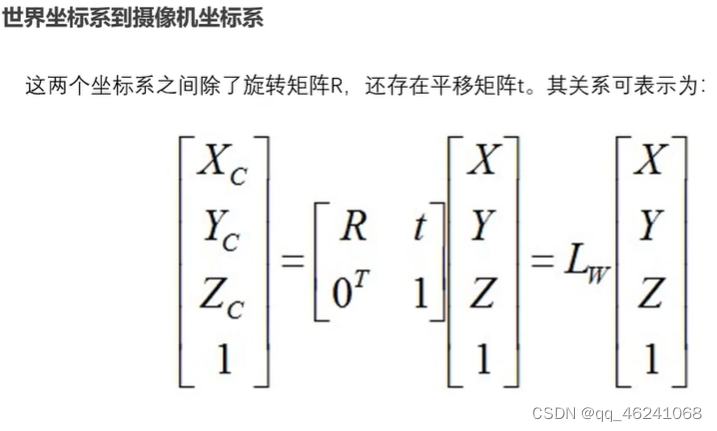
左边为相机坐标系,右边为世界坐标系。
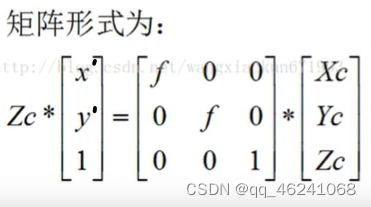
其次是相机坐标系到图像的物理坐标系。
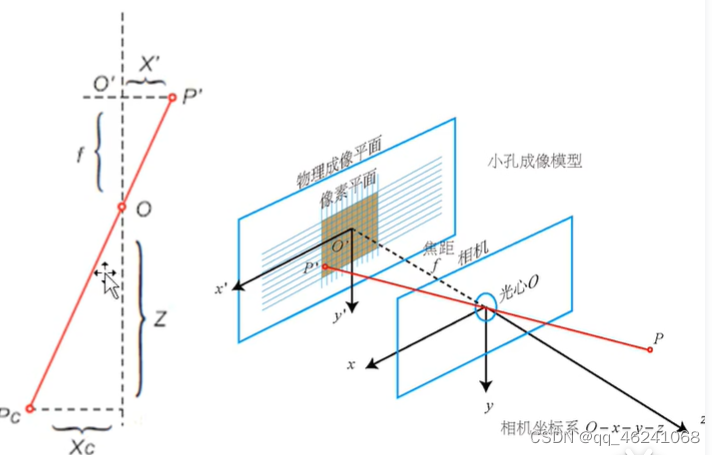
俯视右边成像图,可以得到左边相似三角形关系。得出
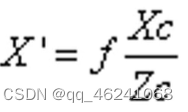
侧边平行于z轴,可以得到:
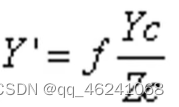
x',y'为图像坐标系坐标,XC ,为相机坐标系坐标。整理得:
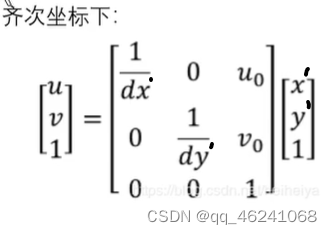
最后是图像坐标系到像素坐标系的转换:

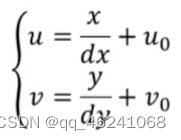
dx和dy分别表示:x方向和y方向的一个像素分别占多少个长度单位。
综合以上,先实现相机坐标系到像素坐标系的转换:
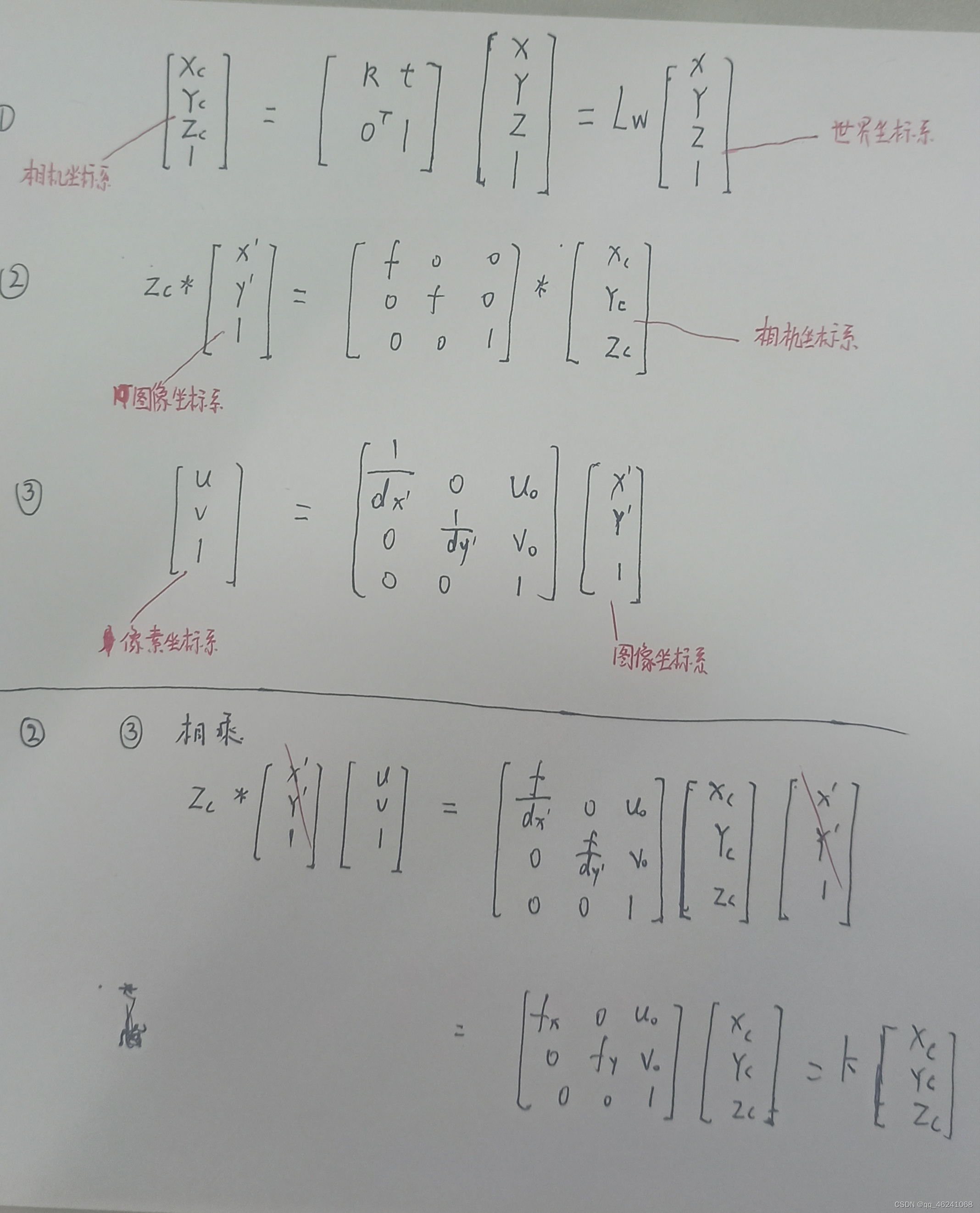
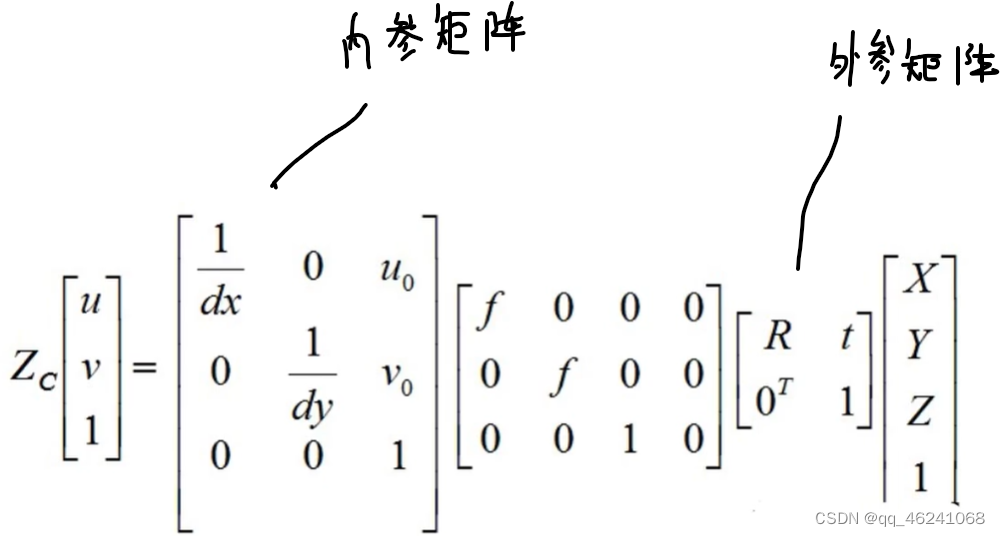
K为相机内参,然后将Xc,Yc,Zc(相机坐标系)用X,Y,Z(世界坐标系)代替。
最终得到像素坐标系到世界坐标系的转换:
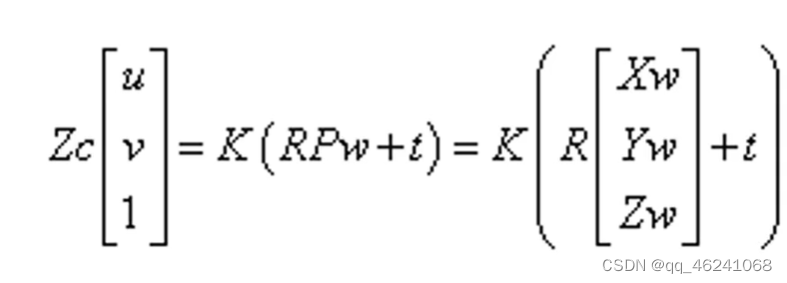
即:















 3729
3729











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









