







要实现对永磁同步电机的控制,第一步就是建立其数学模型;
因为数学模型能够准确的表示出各个参数之间的关系;
所以建立一个合适的模型是实现精准控制的基础;
因此把电机的建模放在了第一位;
永磁同步电机的数学模型包括什么呢?
电压方程、磁链方程、转矩方程等等。
大家都知道永磁电机是一个非线性的系统;
各种变量参数之间的关系及其相应的计算也较为复杂,
因此,通过对坐标进行变换,从而保证坐标变换前后电流矢量的不变,
以达到对坐标系进行简化的目的,
简化之后的坐标系相比简化之前结构更简单,
计算量更少,控制更容易,可以增强对系统的控制。
常见的坐标系表示方法有:
A-B-C坐标系、α-β坐标系、d-q坐标系。
在建模之前需要做一些假设:
1.定子绕组为 Y 型联接,三相绕组对称分布,轴线互差 120°;
2.忽略铁芯饱和效应,不计涡流和磁滞损耗;
3.永磁磁场和电枢磁场在气隙中均为正弦分布;
4.稳态运行时,相绕组中感应电动势波形为正弦波;
5.电机长时间工作受到温度和频率影响不计;
6.把电机具有的高次谐波进行忽略,并对转子上的阻尼绕组不参加计算;
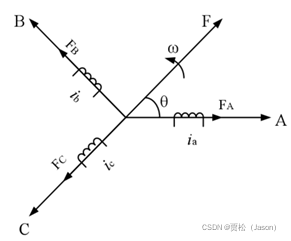
A-B-C坐标系的数学模型:
这种坐标系就是三相静止坐标系。这种坐标系下的PMSM三相定子绕组的轴线彼此相差 ,电机的电压、电流以及磁链分量就是三相的实际分量,因为这种坐标系下三者是对称分布的,因此要想得到在同步角频率下旋转的合成矢量,就必须通以互差120°的正弦电流。
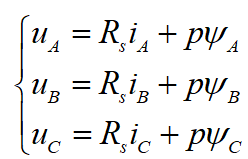
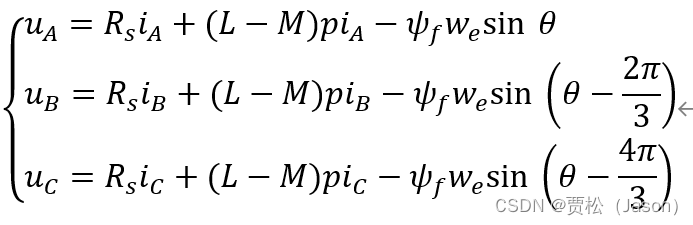
电压方程:
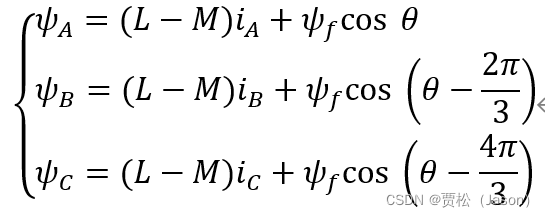
磁链方程:
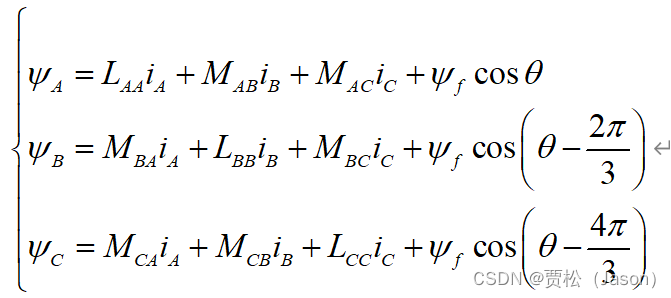
由理想电机的三相绕组是对称分布的可知,

同时 Y 型连接的三相绕组电流满足:
iA+iB+iC=0
将式上面的三个公式联立可将磁链方程化为:
将上式带入电压方程得:
α-β坐标系的数学模型:
这种坐标系就是两相静止坐标系,是将α轴固定,使其在定子A相绕组轴线上保持不动,而β轴相比于α轴超前 90°在 坐标系中也同样可以产生类似于A-B-C坐标系下的合成矢量,即通入互差90°的两相交流电。
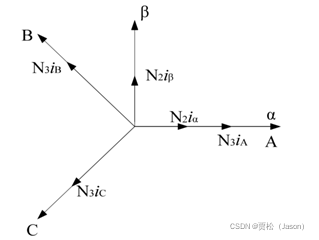
电机模型从A-B-C坐标系变到α-β坐标系需要经过Clarke变换,
Clarke变换:
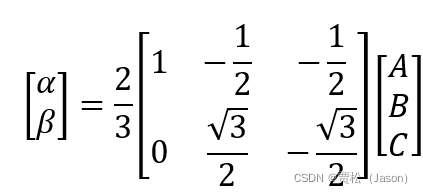
通过上式经过Clarke变换后得到电机的电压方程为:
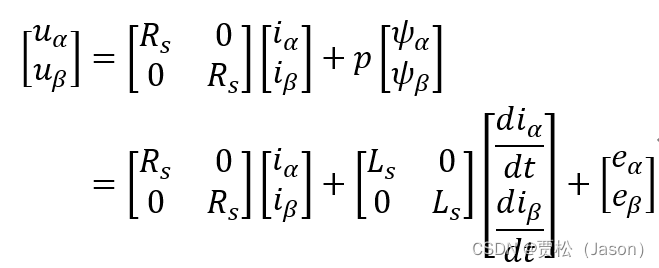
![]()
分别为定子电压、电流和磁链在α-β坐标下的分量。
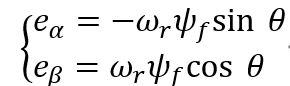
电动势方程的表达式为:
电磁转矩方程如下:

Te为电磁转矩, p为电机极对数。
在α-β坐标系中,经过线性变换使A、B、C三相坐标系中的电机数学模型方程得到一定简化。针对内永磁同步电机,因为转子直、交轴的不对称而具有凸极效应,直轴、交轴电感不相等,即Ld≠Lq,因此,在α-β坐标系中的内永磁同步电机磁链、电压方程是一组非线性方程组,数学模型相当复杂,将该方程组用于内永磁同步电机的分析和控制时也很复杂,一般不采用该坐标系下的电机数学模型。然而,对于具有对称转子结构的表面式永磁同步电机,因为Ld= Lq,电机的数学模型相对简单,可以用于对该电机的分析与控制。但实际上,即便是面装式永磁同步电机,也不能保证Ld= Lq,故在分析永磁同步电机的控制与运行时,一般不用这个模型。在该模型下的运动方程和转矩方程和在A、B、C三相坐标系下的方程相似,运动方程因与电机运动状态有关,不涉及电机的电、磁参量,其表述简单,而转矩方程则相对复杂。
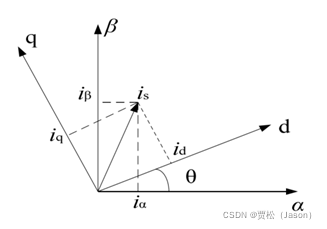
d-q坐标系的数学模型:
坐标系即转子磁链同步旋转坐标系,由正交的d轴和q轴组成,d轴的方向就是转子永磁体磁链方向。d轴和a相绕组轴线之间的夹角为θ。要得到上文中的合成磁动势空间矢量,只要在绕组中加入直流电即可。
Park变换:
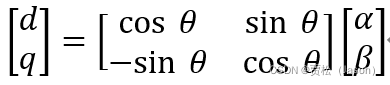
通过上式经过Park变换后得到电机的电压方程为:
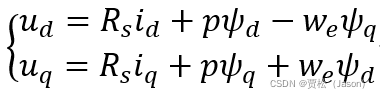
磁链方程:
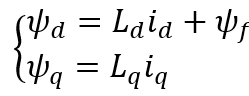
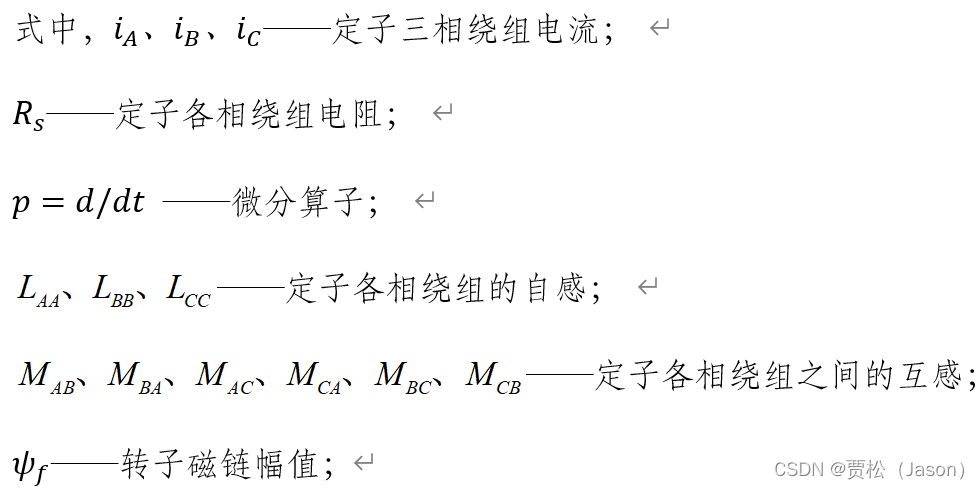
式中:
ud、uq——定子电压在 d、q 轴的分量;
id、iq——定子电流在 d、q 轴的分量;
ψd、ψq——定子磁链在d、q 轴的分量;
Ld、Lq——定子绕组 d、q 轴等效电感;
对永磁同步电机的转矩控制主要在d -q坐标系下实现,这里给出此坐标系
下的电机转矩方程:
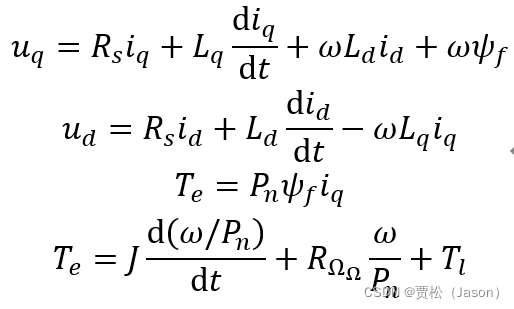
对于表面式永磁同步电机, 有Ld=Lq, 其数学模型成为:
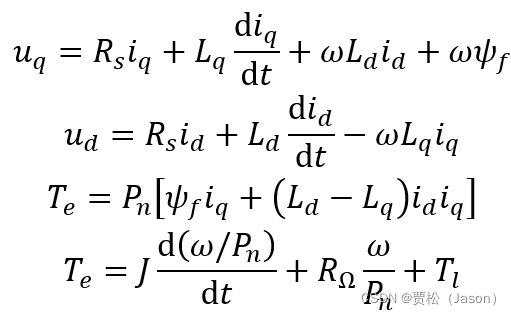
对于内置式永磁同步电机, 有Ld≠Lq, 其数学模型成为:



















 4931
4931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











