









一.编译安装ROS-Academy-for-Beginners-noetic
可以参考我之前的博客ROS-Academy-for-Beginers-noetic安装教程
之后可以看到里面提供了很多例程,包括
| 软件包 | 内容 |
| :--- | :----: |
| **robot_sim_demo** | 机器人仿真程序,大部分示例会用到这个软件包 |
| **topic_demo** | topic通信,自定义msg,包括C++和python两个版本实现 |
| **service_demo** | service通信,自定义srv,分别以C++和python两种语言实现 |
| **action_demo** | action通信,自定义action,C++语言实现 |
| **param_demo** | param操作,分别以C++和python两种语言实现 |
| **msgs_demo** | 演示msg、srv、action文件的格式规范 |
| **tf_demo** | tf相关API操作演示,tf示例包括C++和python两个版本 |
| **name_demo** | 演示全局命名空间和局部命名空间下参数的提取 |
| **tf_follower** | 制作mybot机器人 实现mybot跟随xbot的功能 |
| **urdf_demo** | 创建机器人urdf模型,在RViz中显示 |
| **navigation_sim_demo** | 导航演示工具包,包括AMCL, Odometry Navigation等演示 |
| **slam_sim_demo** | 同步定位与建图演示,包括Gmapping, Karto, Hector等SLAM演示 |
| **orbslam2_demo** | ORB_SLAM2的演示 |
| **rtabmap_demo** | rtabmap的演示 |
| **cartographer_demo** | cartographer安装演示包|
| **dependlib** | ubuntu18所依赖的包(melodic不自带) |
| **ros_academy_for_beginners** | Metapacakge示例,依赖了本仓库所有的pacakge |
具体可看作者的github链接
在每个例程的README.md文件可以看到使用教程;在跑完例程后,我们开始尝试修改一些东西,来使他变得更有趣,更多样化。
二.修改仿真环境
1.首先了解文件的架构
├── CMakeLists.txt
├── launch
│ ├── include
│ │ └── xbot-u.launch.xml #机器人模型(设置机器人初始位置)
│ └── robot_spawn.launch #启动launch文件显示仿真环境
├── models #仿真空间
│ ├── ISCAS_groundplane #地板
│ │ ├── materials
│ │ │ ├── scripts
│ │ │ │ └── ISCAS_groundplane.material
│ │ │ └── textures
│ │ │ └── ISCAS_groundplane.png
│ │ ├── model.config
│ │ └── model.sdf
│ ├── ISCAS_Museum #墙面
│ │ ├── meshes
│ │ │ ├── ISCAS_museum.dae
│ │ │ ├── zd_011.jpg
│ │ │ ├── zd_021.jpg
│ │ │ ├── zd_031.jpg
│ │ │ └── zd_041.jpg
│ │ ├── model.config
│ │ └── model.sdf
│ ├── ISCAS_post
│ │ ├── meshes
│ │ │ └── post.dae
│ │ ├── model.config
│ │ └── model.sdf
│ └── meshes #各个模型渲染的部分包括基底以及pitch、yaw平台以及相机和激光雷 达
│ ├── base_link.dae
│ ├── pitch_platform.dae
│ ├── realsense.dae
│ ├── rplidar.dae
│ ├── sick_tim571.stl
│ ├── uvtietu.jpg
│ ├── wheel.dae
│ ├── wheel.jpg
│ ├── xtion_pro_camera.dae
│ ├── xtion_pro_camera.jpg
│ └── yaw_platform.dae
├── package.xml
├── param
│ ├── mux.yaml #订阅话题以及发布话题的相关参数设置
│ └── xbot-u_control.yaml #机器人控制参数的设置(PID)
├── README.md
├── scripts
│ └── robot_keyboard_teleop.py
├── simulation_pic.png
├── urdf #构建机器人模型
│ ├── materials.xacro #颜色设置
│ ├── robot.urdf #urdf文件是通过xacro文件转换自动生成的(xacro文件比较精简, urdf文件比较复杂)
│ ├── robot.xacro #机器人整体模型文件(可以选择激光雷达的类型)包含该文件下的所有文 件
│ ├── sick_tim.gv #使用命令生成的<urdf_to_graphiz robot.urdf>
│ ├── sick_tim.pdf #显示整个机器人模型的连接关系
│ ├── sick_tim.urdf.xacro #激光雷达模型(多种激光雷达,包括rplidarA2、sick_tim310、 551、571等)
│ ├── xbot-u.gazebo
│ └── xbot-u.urdf.xacro #机器人模型所需要的各个部分可以通过可以通过rqt_tf_tree查看各个 link和joint之间的连接关系
└── worlds
└── ROS-Academy.world
原文链接:https://blog.csdn.net/qq_36170626/article/details/106542521
2.配制自己的world
在robot_sim_demo/launch目录下复制一份robot_spawn.launch,并重命名为my_ground.launch,并修改其内容如下
<launch>
<arg name="robot" default="xbot-u"/>
<arg name="debug" default="false"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<!-- Start Gazebo with a blank world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find robot_sim_demo)/worlds/my_ground.world"/>
<!--arg name="world_name" value="$(find robot_sim_demo)/worlds/sai_di.world"/-->
<!--arg name="world_name" value="$(find turtlebot_gazebo)/worlds/playground.world"/-->
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Oh, you wanted a robot? -->
<include file="$(find robot_sim_demo)/launch/include/$(arg robot).launch.xml"/>
<!--node name="rviz" pkg="rviz" type="rviz" args="-d $(find robot_sim_demo)/urdf_gazebo.rviz" /-->
</launch>可以看到,在加载world时,加载的是已经修改好的my_ground.world。
所以,在robot_sim_demo/worlds下,复制一份ROS-Academy.world,并取名为my_ground.world,其具体内容为
<?xml version="1.0" ?>
<sdf version="1.4">
<world name="default">
<scene>
<ambient>0.68 0.68 0.68 1.0</ambient>
<shadows> false</shadows>
<sky>
<sunrise/>
<clouds>
<speed>12</speed>
</clouds>
</sky>
</scene>
<physics type='ode'>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
<gravity>0 0 -9.8</gravity>
</physics>
<include>
<uri>model://sun</uri>
</include>
<include>
<uri>model://ISCAS_groundplane</uri>
</include>
<include>
<uri>model://SampleScene</uri>
<pose>0 0 0 0 0 -1.57</pose>
</include>
<!--<include>
<uri>model://ISCAS_post</uri>
<name>table1</name>
<pose>8 3.5 0 0 0 1</pose>
</include>
<include>
<uri>model://ISCAS_post</uri>
<name>table2</name>
<pose>6 5 0 0 0 1.57</pose>
</include>-->
</world>
</sdf>可以看到我们用了该项目自带的ISCAS_groundplane作为地面,SampleScene作为模型。完成后,可以运行
roslaunch robot_sim_demo my_ground.launch查看结果
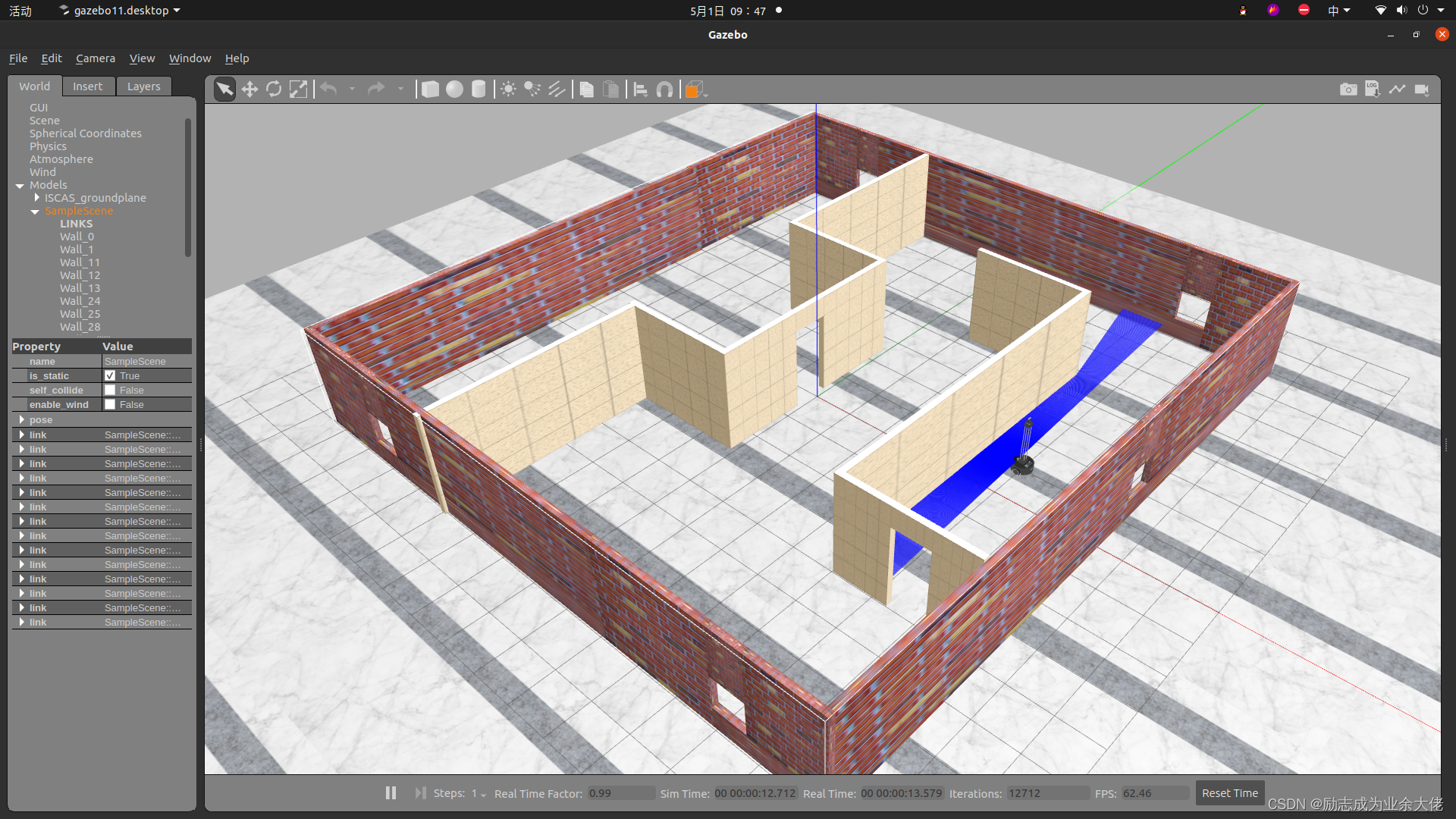
如果显示这样,那么就成功了。
3.自定义模型
可以参考链接
三.在此环境下使用gmapping建图
查看slam_sim_demo/README.md文件,发现只需要替换掉仿真场地即可。
执行代码
roslaunch robot_sim_demo robot_spawn.launch
rosrun robot_sim_demo robot_keyboard_teleop.py
roslaunch slam_sim_demo gmapping_demo.launch
roslaunch slam_sim_demo view_slam.launch 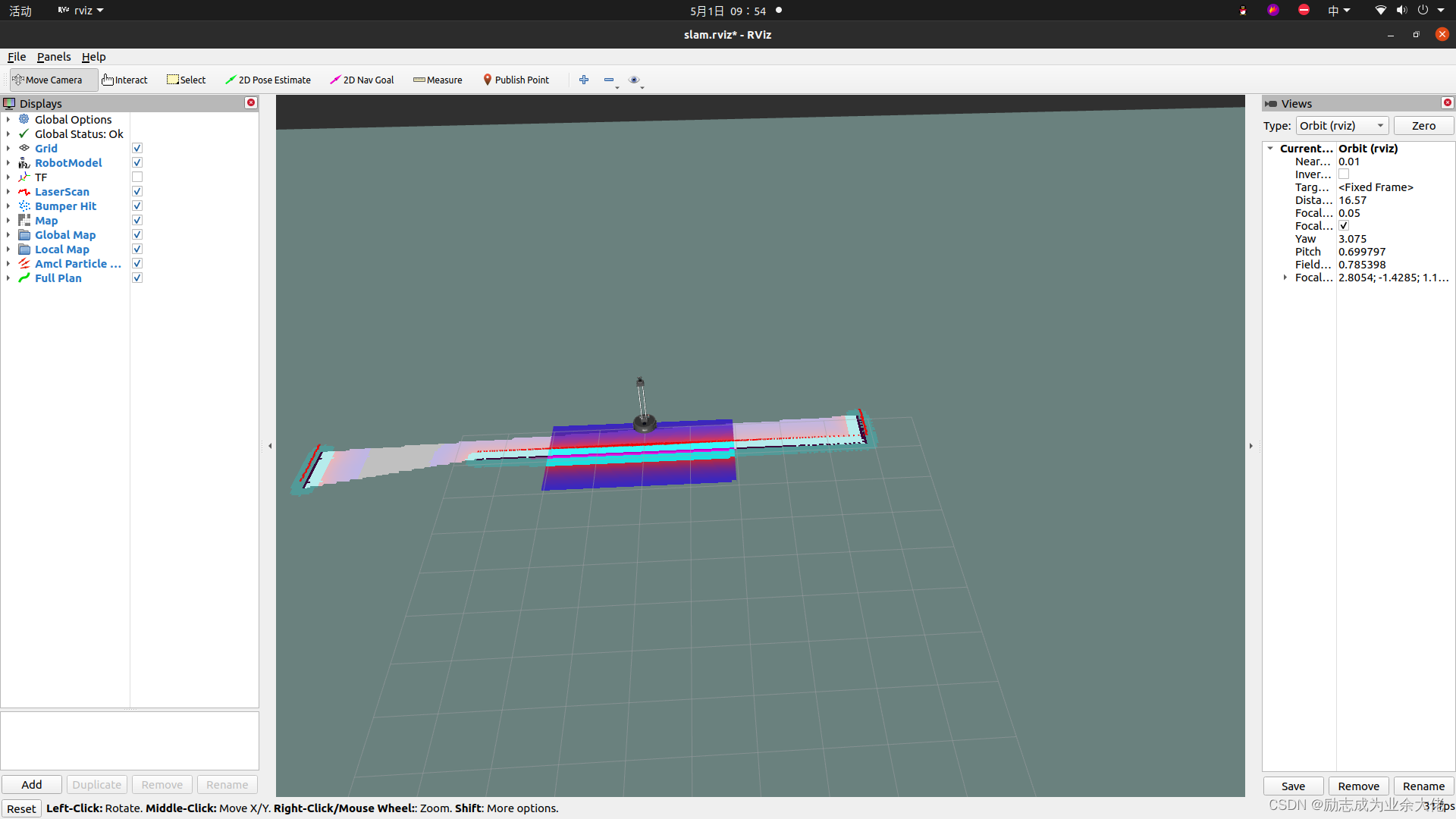 如果最终是这样,说明成功了。
如果最终是这样,说明成功了。
接下来需要控制键盘完成小车移动建图,在建完图后,执行代码
rosrun map_server map_saver -f path完成地图的保存,保存完会生成2个文件,一个pgm文件和一个yaml文件,即地图图片文件和地图描述文件。
如图中的my_ground.pgm和my_ground.yaml
四.完成在新建地图下的导航
在navigation_sim_demo/README.md文件,查看发现地图的加载是在amcl_demo.launch里实现的,因此我们复制一份该文件,并重命名为my_ground_amcl.launch,并修改如下
<launch>
<!-- Map server -->
<arg name="map_file" default="$(find slam_sim_demo)/maps/my_ground.yaml"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<!-- Localization -->
<arg name="initial_pose_x" default="5.0"/>
<arg name="initial_pose_y" default="0.0"/>
<arg name="initial_pose_a" default="-2.0"/>
<arg name="custom_amcl_launch_file" default="$(find navigation_sim_demo)/launch/include/robot_amcl.launch.xml"/>
<include file="$(arg custom_amcl_launch_file)">
<arg name="initial_pose_x" value="$(arg initial_pose_x)"/>
<arg name="initial_pose_y" value="$(arg initial_pose_y)"/>
<arg name="initial_pose_a" value="$(arg initial_pose_a)"/>
</include>
<!-- Move base -->
<include file="$(find navigation_sim_demo)/launch/include/move_base.launch.xml"/>
</launch>可见,在第三行修改成了刚刚建好的my_ground.yaml地图配置文件。
接着执行代码
roslaunch robot_sim_demo my_ground.launch
roslaunch navigation_sim_demo my_ground_amcl.launch
roslaunch navigation_sim_demo view_navigation.launch实现在现有地图的导航
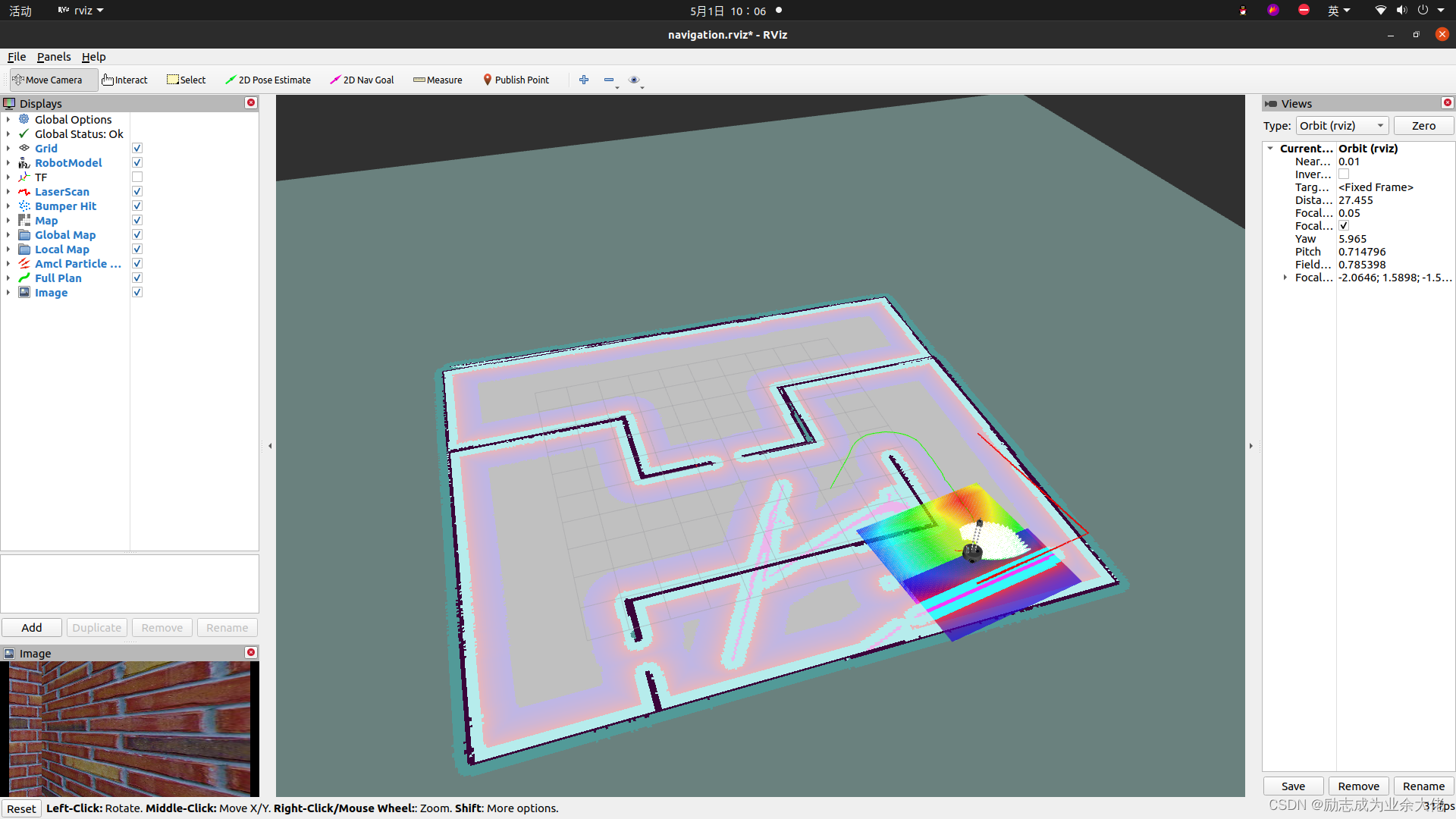
可以看到,小车成功在地图导航。
感兴趣的小伙伴也可以自己搭建仿真环境,实现建图和导航。
也可以把差速轮换成麦克纳姆轮,这也是我之后想做的地方,大家可以多学习交流。















 381
381











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









