







 本文介绍了ROS中的launch文件使用,包括launch文件的基本结构和如何启动节点、设置参数。同时阐述了ROS参数服务器的作用,详细讲解了如何通过launch文件、命令行以及节点源码来维护参数。此外,还展示了向ROS节点传递参数的两种方法,分别是通过参数服务器和main()函数参数。
本文介绍了ROS中的launch文件使用,包括launch文件的基本结构和如何启动节点、设置参数。同时阐述了ROS参数服务器的作用,详细讲解了如何通过launch文件、命令行以及节点源码来维护参数。此外,还展示了向ROS节点传递参数的两种方法,分别是通过参数服务器和main()函数参数。
快速链接:【ROS入门篇】ROS学习简介
一、launch文件使用
1.1 launch文件简介
·launch文件能够同时启动一个ROS Master和多个Node
·launch文件的标签
<launch> <!--根标签-->
<node> <!--需要启动的node及其参数-->
<include> <!--包含其他launch-->
<machine> <!--指定运行的机器-->
<arg> <!--定义变量-->
<param> <!--定义参数到参数服务器-->
<rosparam> <!--启动yaml文件参数到参数服务器-->
<remap> <!--设定参数映射-->
<group> <!--设定命名空间-->
<env-loader> <!--设置环境变量-->
</launch> <!--根标签-->1.2 launch文件基本示例
<launch>
<!--arg是launch标签中的变量声明,arg的name为变量名,default或者value为值-->
<arg name="robot" default="xbot2"/>
<arg name="debug" default="false"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="velodyne_frame_id" default="velodyne"/>
<!--从xx.yaml文件中加载参数到参数服务器,ns声明工作空间,可以省略-->
<rosparam command="load" file="$(find test01)/launch/params.yaml" ns="hello"/>
<!-- Start Gazebo with a blank world --> <!--include用来嵌套仿真场景的launch文件-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find robot_sim_demo)/worlds/ROS-Academy.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 启动process_sub_pub节点 -->
<node pkg="process_velodyne" type="velodyne_sub_pub" name="velodyne_sub_pub" output="screen" >
<param name="velodyne_frame_id" type="string" value="$(arg velodyne_frame_id)"/>
<remap from="velodyne_points" to="processed_points"/remap>
</node>
<!--如果你想连同RViz一起启动,可以按照以下方式加入RViz这个node-->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find robot_sim_demo)/urdf_gazebo.rviz" />
</launch>二、ROS中Parameter server机制
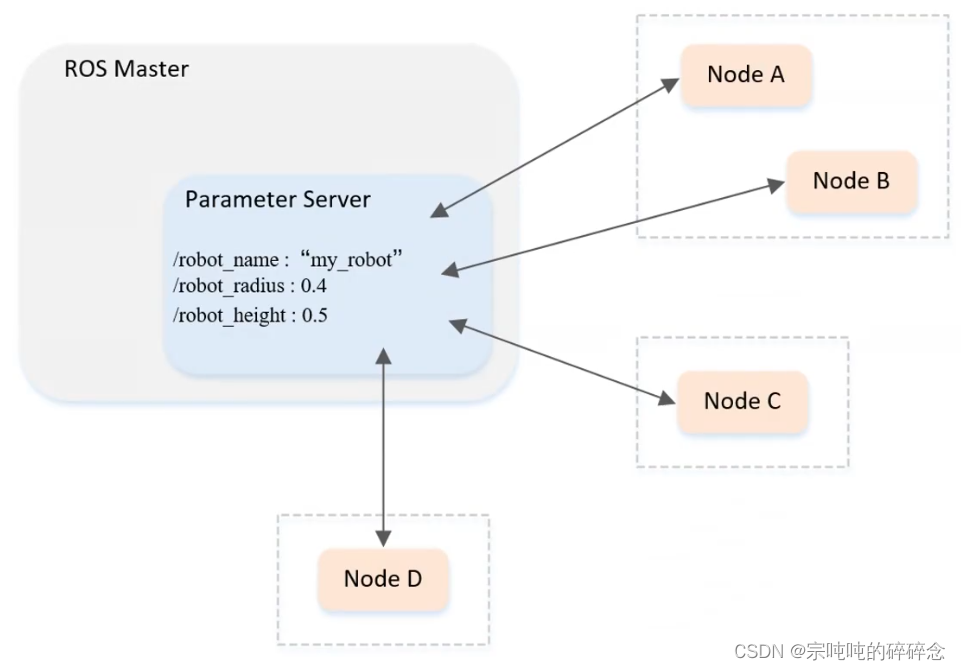
- 用于存储节点参数,以键值对的形式存储,全局共享
2.1 Parameter server中参数维护方式
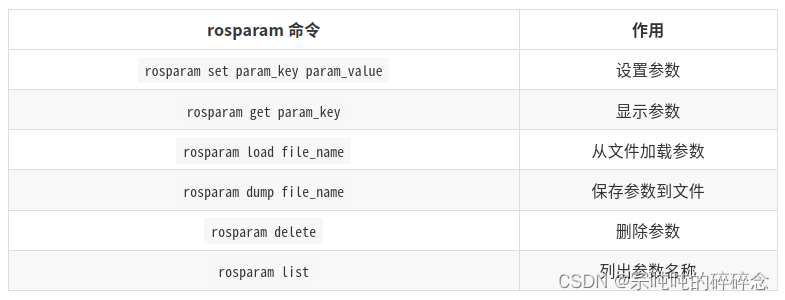
1) 命令行维护
2) launch文件进行读写
- 写入单个参数到参数服务器 <param>
<!--直接定义参数并赋值-->
<param name="velodyne_frame_id" type="string" value="velodyne"/>
<!--定义参数并通过arg给参数赋值-->
<arg name="velodyne_frame_id" default="velodyne"/>
<param name="velodyne_frame_id" type="string" value="$(arg velodyne_frame_id)"/>- 从.yaml文件批量写入参数到参数服务器 <rosparam>
<!--从../config/params.yaml文件中加载参数 -->
<rosparam command="load" file="$(find *package_name)/config/params.yaml" />3) 节点源码内进行读写(C++)
C++节点中实现参数服务器的读写有两套API系统:
- ros::NodeHandle
/**
* C++中分别通过ros::NodeHandle实现参数服务器中参数的读写
**/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//初始化ros节点
ros::init(argc,argv,"param_demo_node");
//创建ros节点句柄
ros::NodeHandle nh;
string node_param;
std::vector<std::string> param_names;
// 新增参数到参数服务器中
nh.setParam("param_1", 1.0);
// 读取参数
// 如果参数服务器中参数"param_2"存在, 把"param_2"的值传递给变量node_param;如果"param_2"不存在,就传递默认值"hahaha"
nh.param<std::string>("param_2",node_param,"hahaha");
// 如果参数"param_2"存在,返回true,并赋值给变量node_param;如果"param_2"不存在,返回false,不赋值
nh.getParam("param_2", node_param);
//其他功能
nh.getParamNames(param_names);
nh.hasParam("param_2");
nh.searchParam("param_2",node_param);
}- ros::param
/**
* C++中分别通过ros::param实现参数服务器中参数的读写
**/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//初始化ros节点
ros::init(argc,argv,"param_demo_node");
string node_param;
std::vector<std::string> param_names;
// 新增参数到参数服务器中
ros::param::set("param_1", 1.0);
// 读取参数
// 如果参数服务器中参数"param_2"存在, 把"param_2"的值传递给变量node_param;如果"param_2"不存在,就传递默认值"hahaha"
node_param = ros::param::param("param_2","hahaha");
// 如果参数"param_2"存在,返回true,并赋值给变量node_param;如果"param_2"不存在,返回false,不赋值
ros::param::get("param_2", node_param);
//其他功能
ros::param::getParamNames(param_names);
ros::param::has("param_2");
ros::param::search("param_2",node_param);
}三、向ROS节点传递参数的多种方法(C++)
3.1 通过参数服务器的方式传递
- 通过launch文件启动节点
<launch>
<node pkg="process_velodyne" type="velodyne_sub_pub" name="velodyne_sub_pub" output="screen" >
<param name="velodyne_frame_id" type="string" value="$(arg velodyne_frame_id)"/>
</node>
</launch>- 通过rosrun启动节点,参数前面加_,用:=的方式来赋值
rosrun process_velodyne velodyne_sub_pub _velodyne_frame_id:="velodyne"- 节点中读取参数(见2.1节内容)
3.2 通过main()函数参数的形式传递
- 通过launch文件启动节点
<launch>
<node pkg="process_velodyne" type="velodyne_sub_pub" name="velodyne_sub_pub" args="arg1 arg2" output="screen"/>
</launch>- 通过rosrun启动节点,参数通过空格隔开
rosrun proess_velodyne velodyne_sub_pub arg1 arg2- 节点中读取参数
在节点中main()函数内,argv[0]是节点名称,argv[1], argv[2]...依次是输入的参数
tips:
1、终端动态设置参数(通过终端运行launch文件/运行节点)
·使用rosrun启动节点设置参数,需要添加_velodyne_frame_id:="velodyne",参数名前面有下划线,表示当前节点下设置私有参数
rosrun process_velodyne velodyne_sub_pub _velodyne_frame_id:="velodyne"·使用roslaunch启动launch文件,参数名前不需要下划线
roslaunch process_velodyne velodyne_sub_pub velodyne_frame_id:="velodyne"Q:在使用rosrun/launch向main()函数传递参数时,-d, -r, --hz这类是什么意思?是指定名名称的参数么?
<launch>
<node name="rosplay"pkg="rosbag"type="play"args="−s 5 −r 1 −−clock −−hz=10 (find costmap_2d)/test/simple_driving_test_indexed.bag" />
</launch>
















 2835
2835

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









