









报错1:警告:文件“*****”的修改时间在未来 7404 秒后
参考:https://blog.csdn.net/zally_1994/article/details/84639341
找到报错的目录,执行:sudo find ./* -exec touch {} +
报错2:调用ros::package::getPath报错
在使用ros::package::getPath时,加入了头文件#include<ros/package.h>出现报错
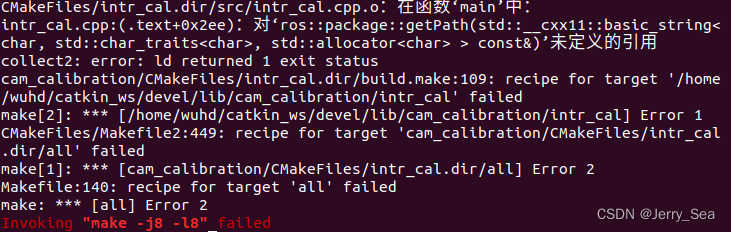
参考:https://blog.csdn.net/qq_29923461/article/details/118991391
报错3:catkin_package() called with unused arguments: roslib
紧接报错2…,在参考另一篇使用ros::package::getPath时,出现报错:
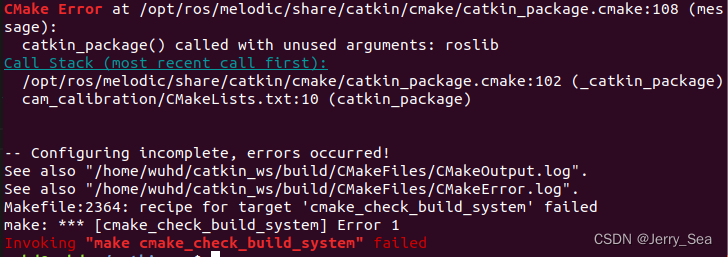
原因:在CMakeLists.txt中,不需要加入下面:
catkin_package(
roslib # 不需要添加这行
)















 6844
6844











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









