







 超级会员免费看
超级会员免费看
目录
一、Open3D中的aabb和obb包围盒的区别
包围盒是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行,碰撞检测Q或者进行精确的碰撞检测之前进行过滤。
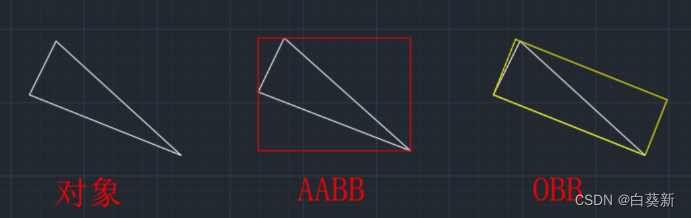
1.1 AABB
主要函数
取坐标最大值和最小值计算简单,但空间有余不能较好的表达物体的真实位姿;
1、get_axis_aligned_bounding_box()获取aabb包围盒。
2、aabb.color = (1,0,0)给aabb包围盒着色。
3、get_center()返回几何坐标的中心。获取AABB包围盒的属性
4、get_extent()获取边界框在x、y和z维度的范围/长度。
5、get_geometry_type()返回已注册的几何类型之一。
6、get_half_extent()返回边框的一半范围。
7、get_max_bound()返回几何坐标的
 订阅专栏 解锁全文
订阅专栏 解锁全文
















 38万+
38万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









