






 本文介绍了如何使用Colmap工具进行图像匹配、位姿估计、特征提取和重建,包括稀疏重建、稠密重建以及深度图和点云融合的过程,并提供了获取内外参txt文件的步骤,帮助读者解决Guassiansplatting中的问题。
本文介绍了如何使用Colmap工具进行图像匹配、位姿估计、特征提取和重建,包括稀疏重建、稠密重建以及深度图和点云融合的过程,并提供了获取内外参txt文件的步骤,帮助读者解决Guassiansplatting中的问题。
问题产生:
Guassian splatting第一步用colmap进行位姿估计,图片匹配失败,输出图片全靠运气,最少的时候甚至一张都没匹配上,所以想到用colmap软件先进行匹配,再放入高斯训练。
colmap使用步骤:
1.打开colmap.bat
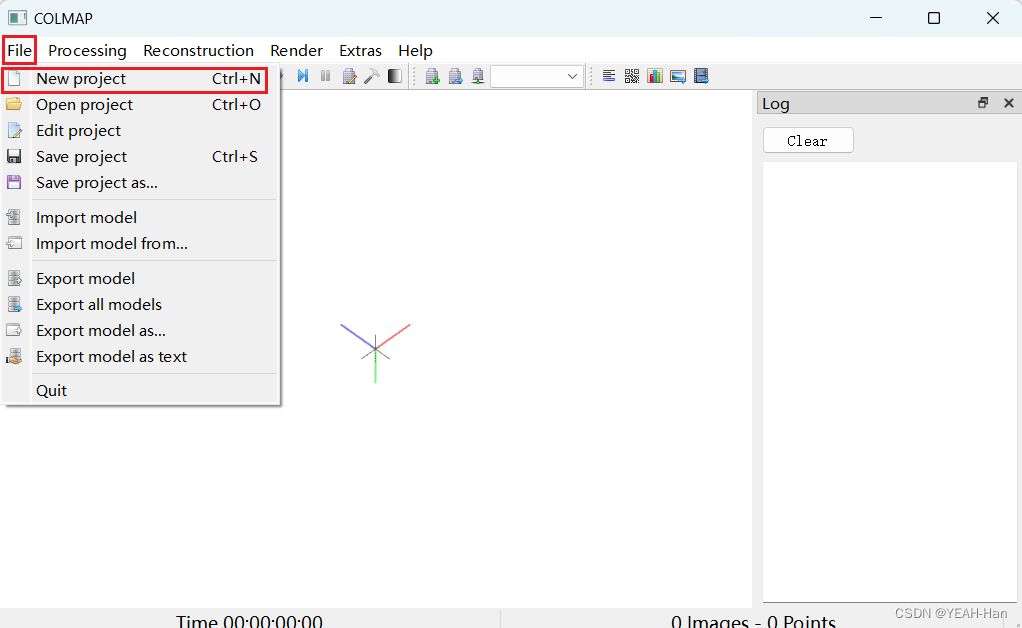
2.新建项目
【File】–> 【New Project】
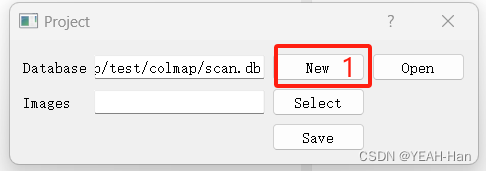
3. 新建database文件,选择images所在路径
【New】新建db文件
【Select】选择images所在路径


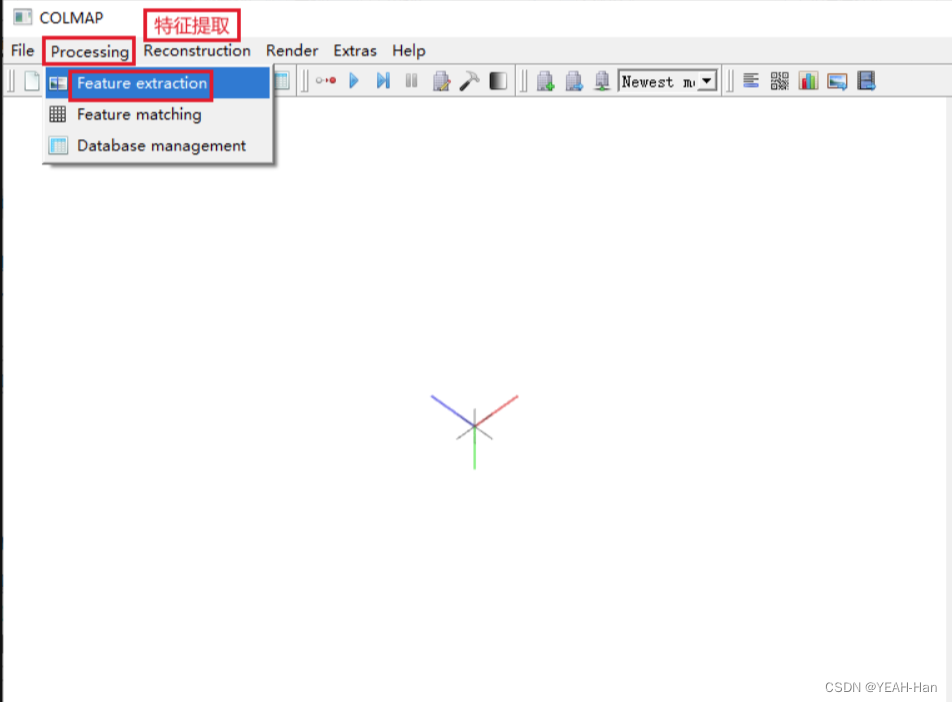
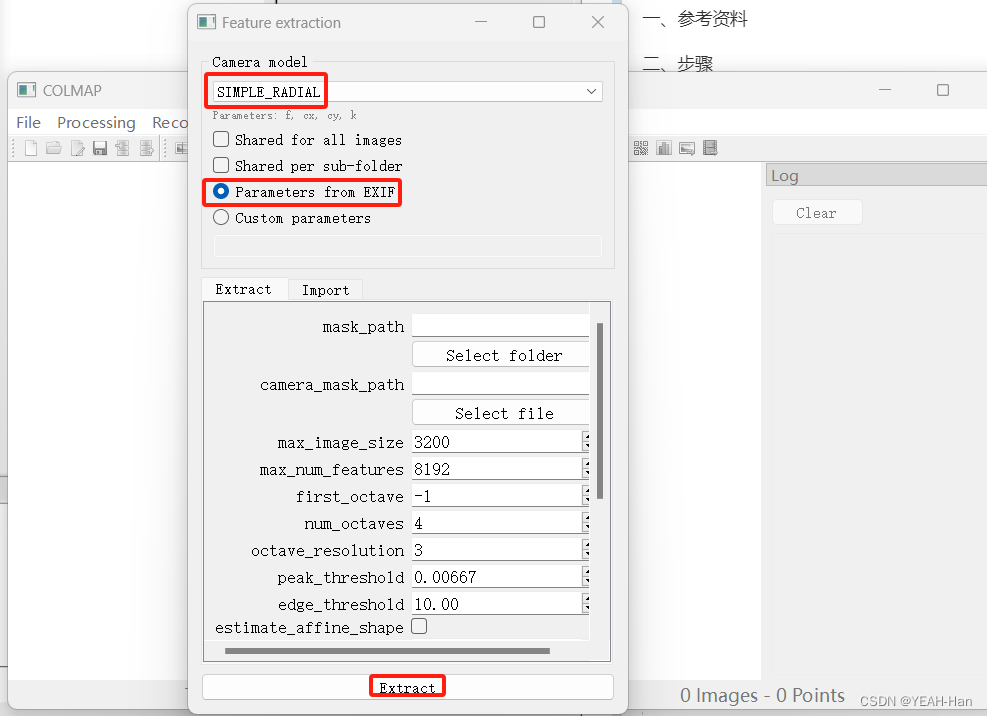
4. 特征提取
【Processing】–> 【Feature extraction】
Camera model选择【SIMPLE_RADIAL】
参数选择【Parameters from EXIF】
点击【Extract】
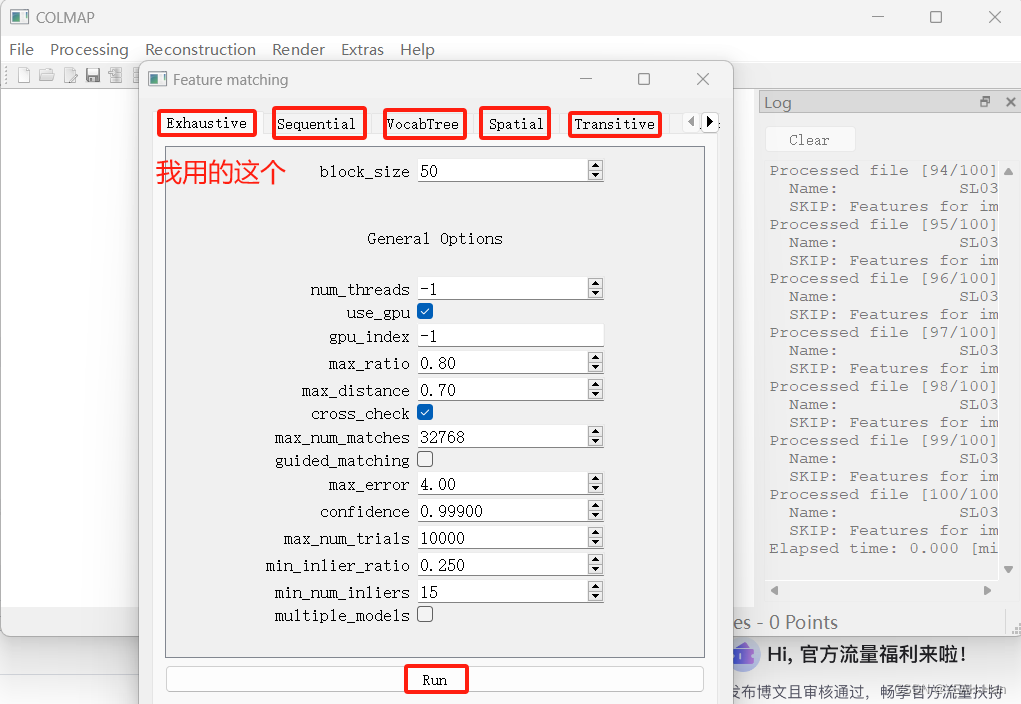
5. 特征匹配
【Processing】–> 【Feature matching】
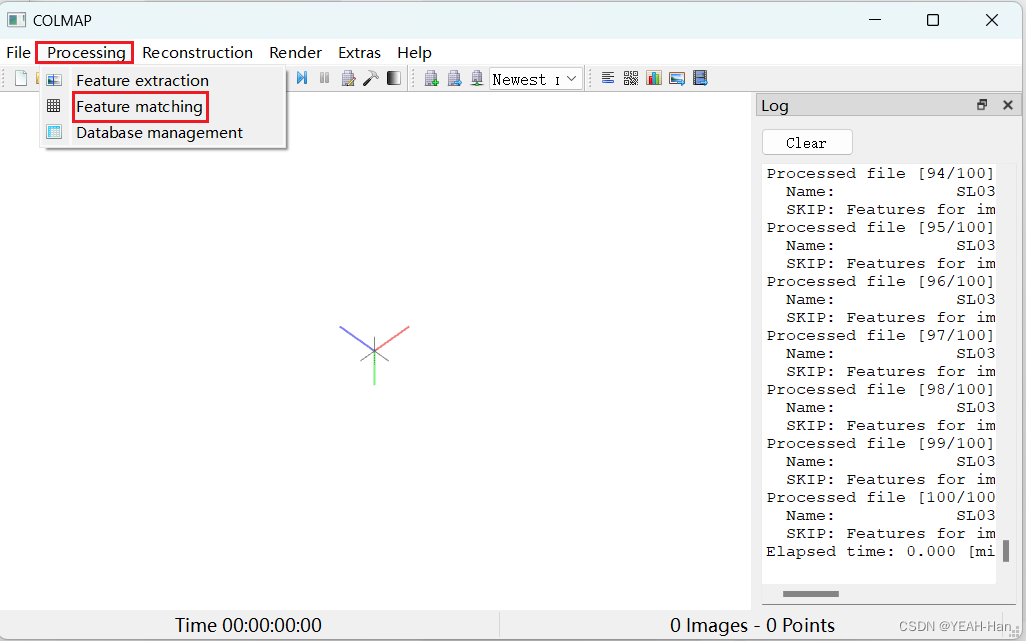
控制面板参数解释,参考博客colmap 【Feature matching】特征匹配参数解释-CSDN博客
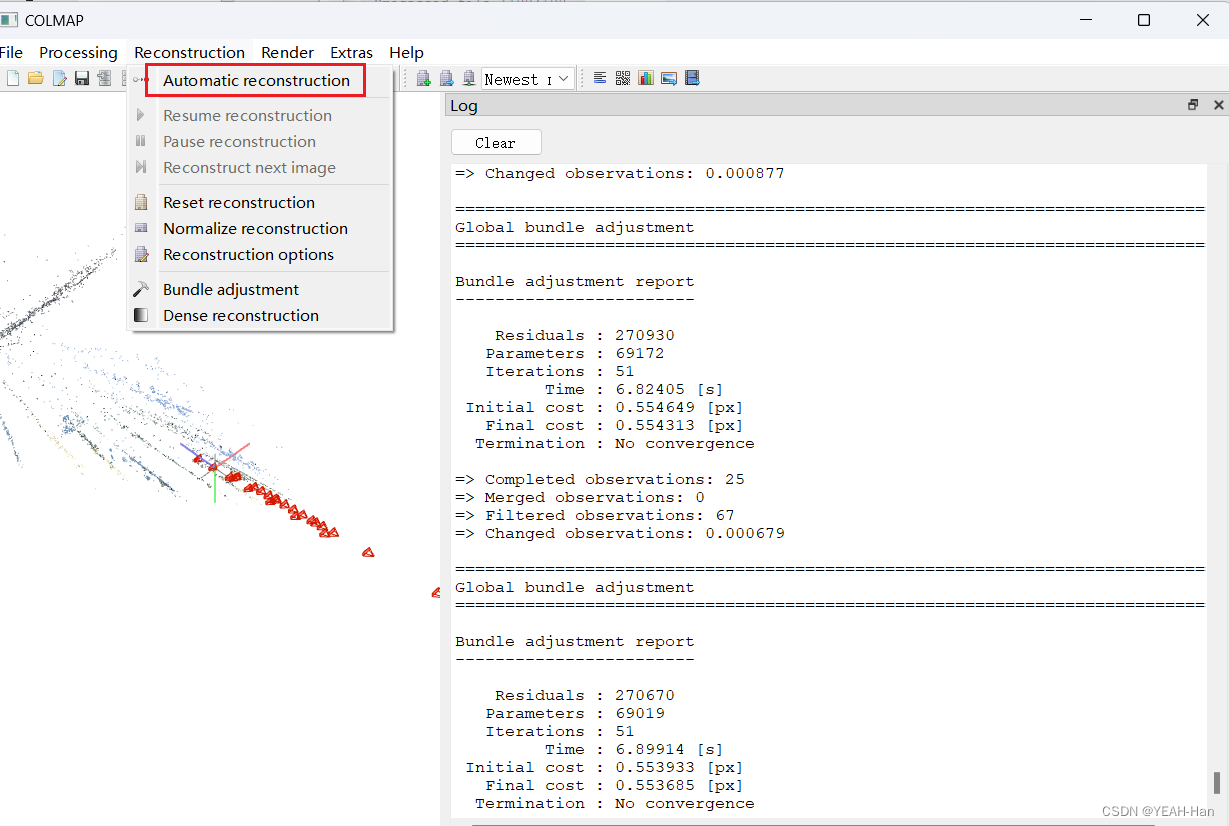
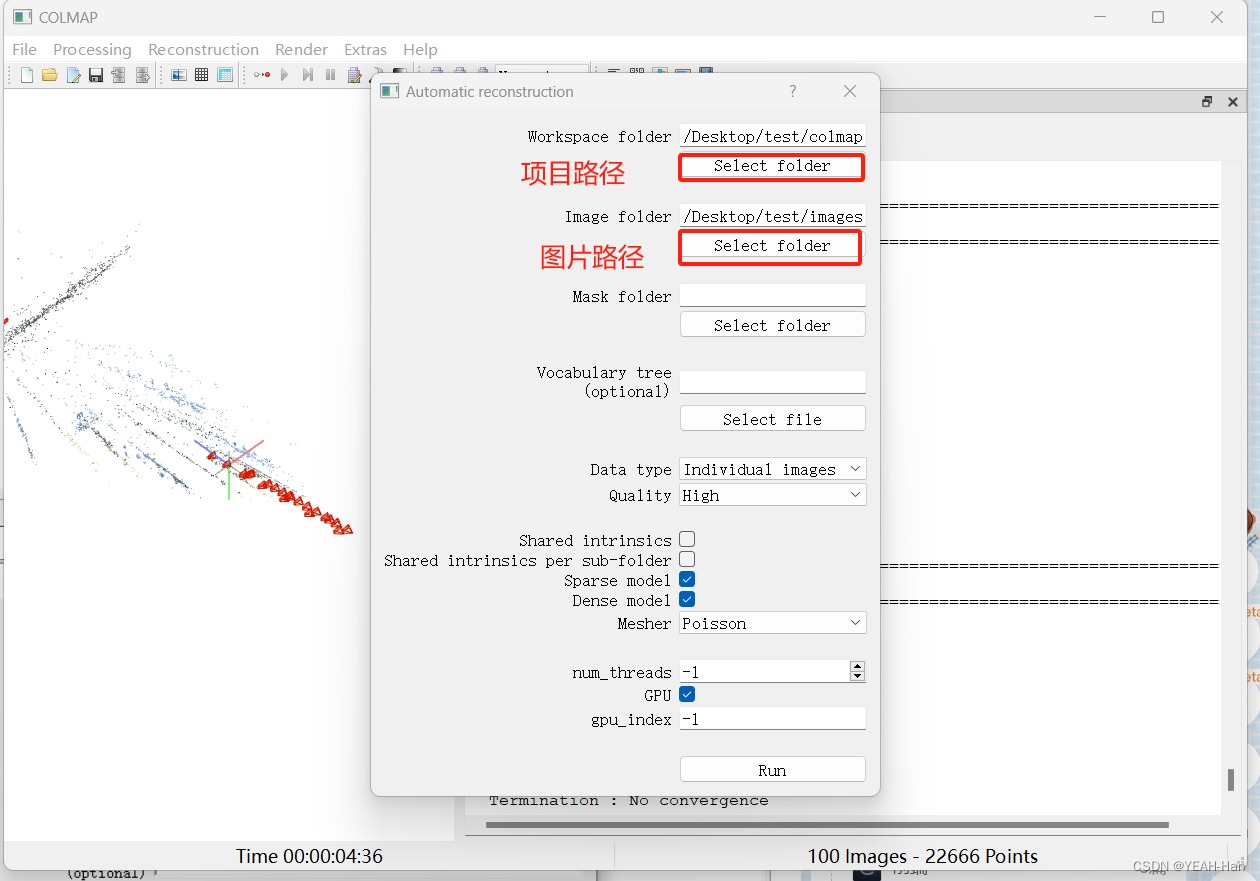
6. 稀疏重建
【Reconstruction】–> 【Automatic reconstruction】
Workspace folder,【Select folder】选择项目目录
Image folder,【Select folder】选择图片路径
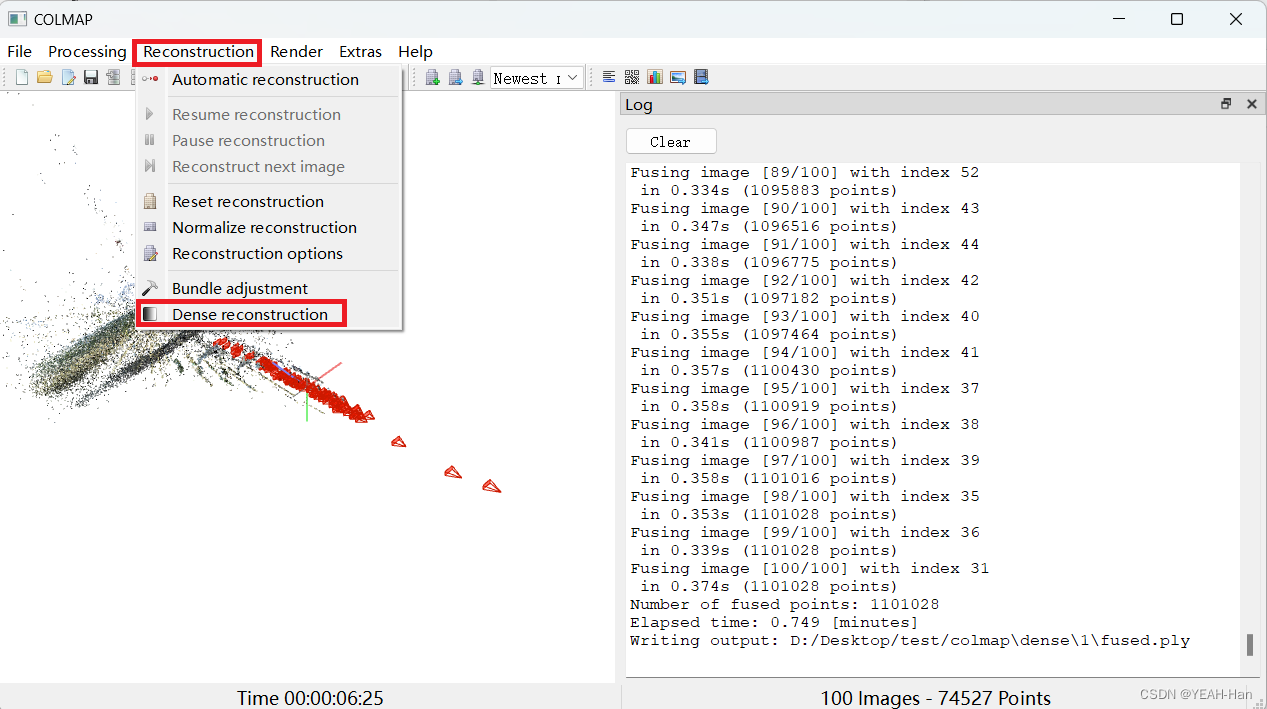
7. 稠密重建
【Reconstruction】–> 【Dense reconstruction】
Workspace工作空间,【Select】选择项目目录–> 【Undistortion】
【Undistortion】是去畸变
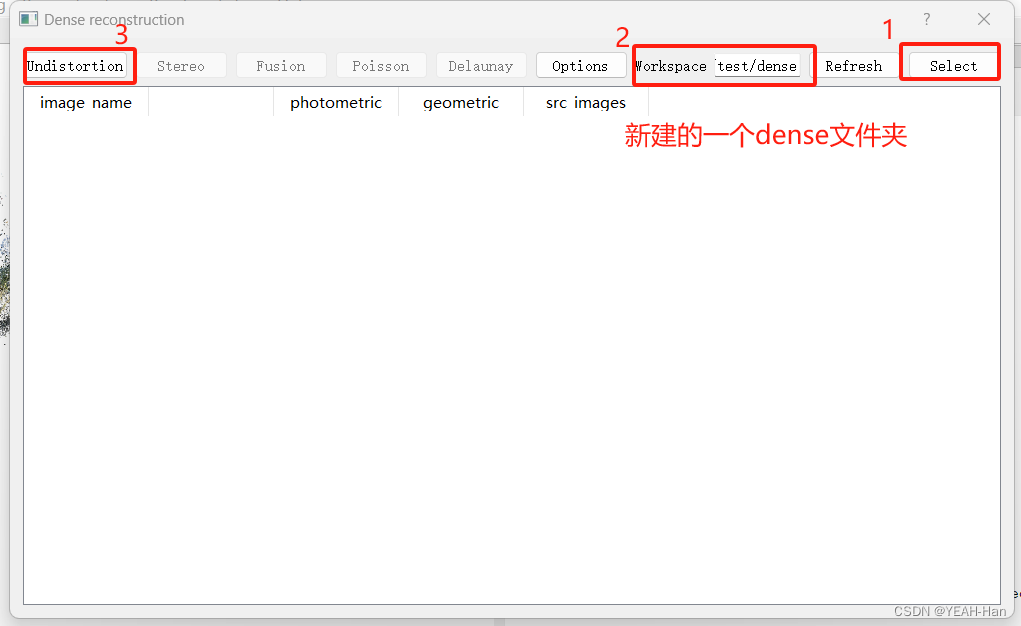
如果是Guassian训练,到这一步就足够了,稠密重建新建的dense文件夹如下:
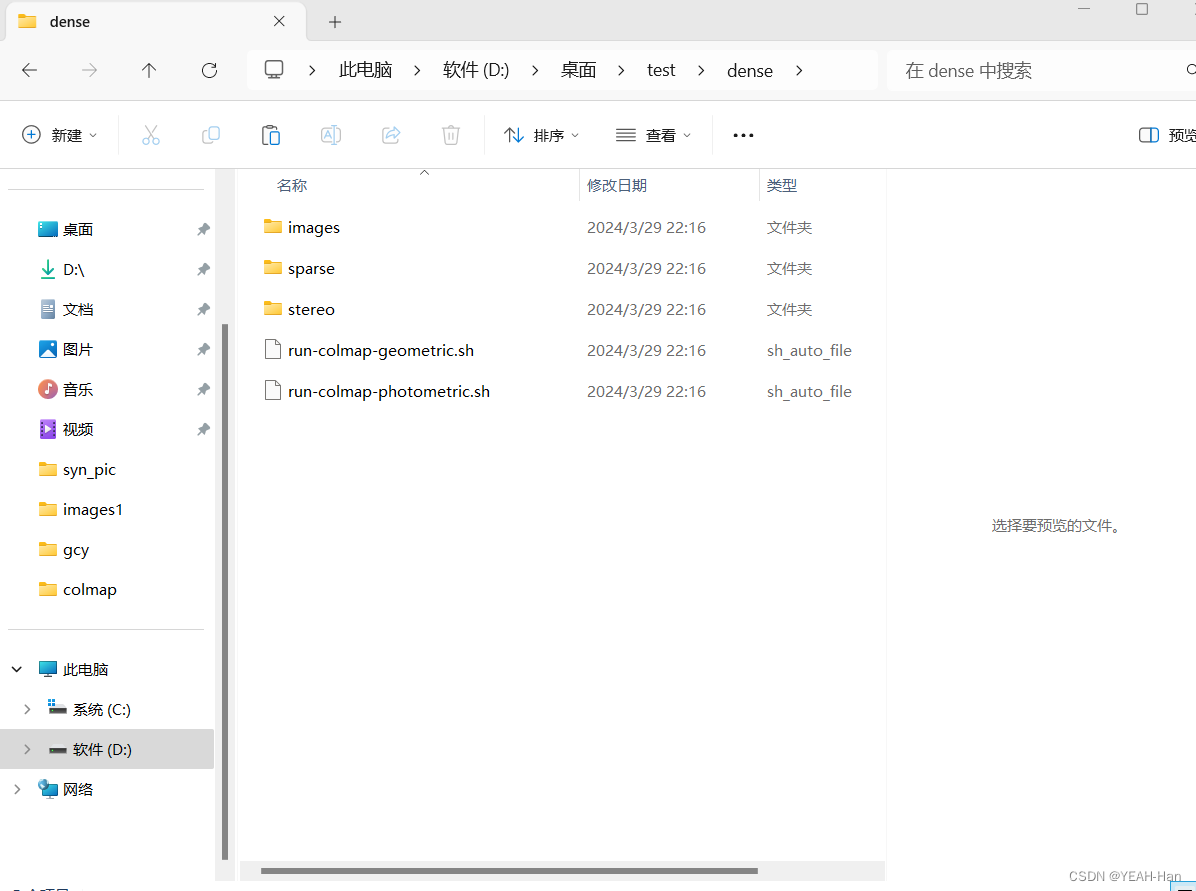
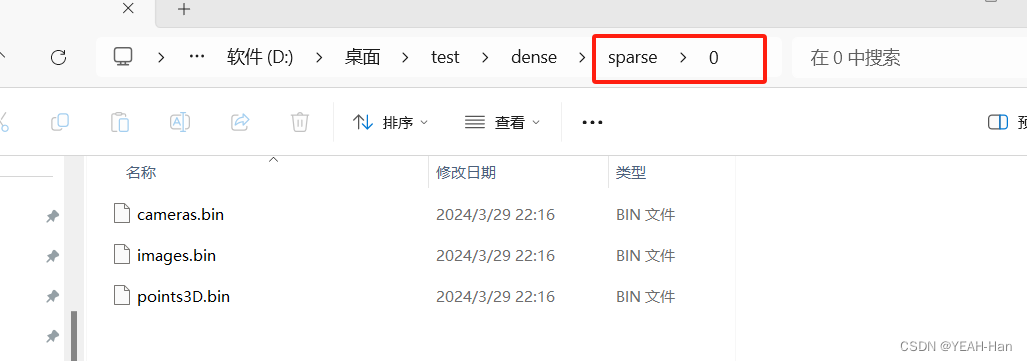
注意:
由于高斯默认是找sparse/0/目录,所以需要将sparse/里面三个文件放到sparse/0/下,
做完上一步就可以将dense里所有文件替换到高斯data目录下的对应文件,就可以进行训练了
------------------------------------------------------------分界线-----------------------------------------------------------
更多需要就继续进行以下步骤:
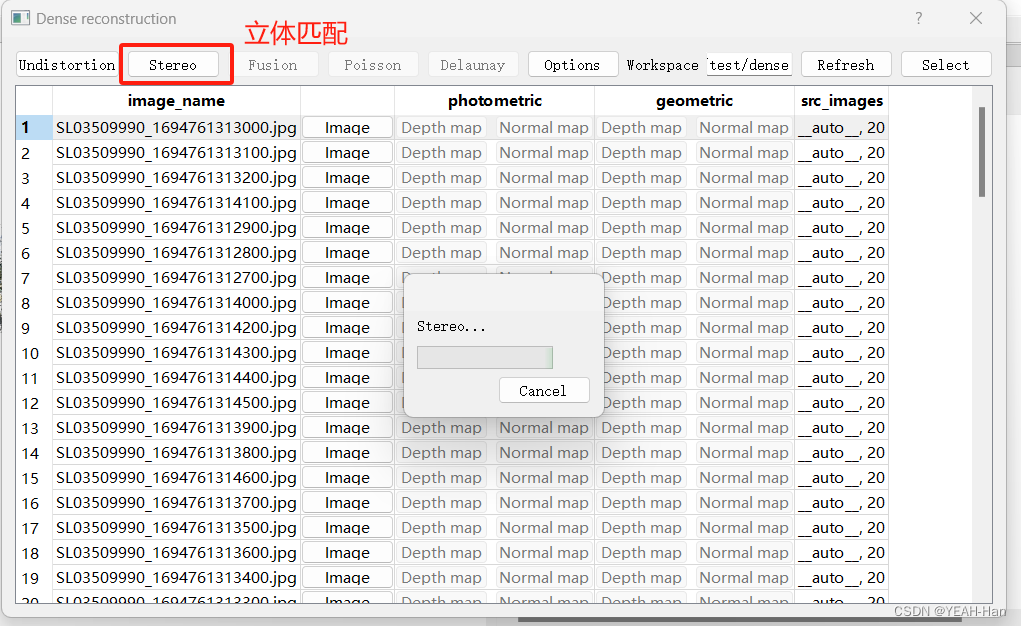
深度图:
如果需要深度图,就继续进行【Stereo】
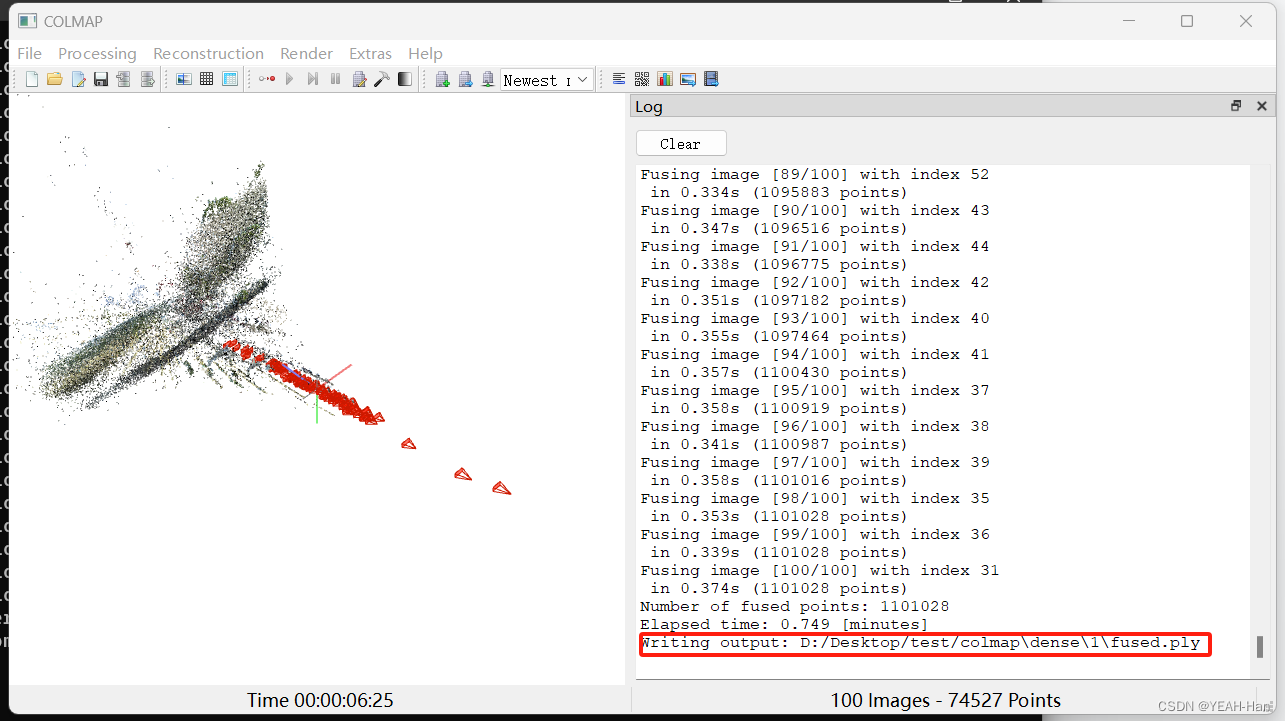
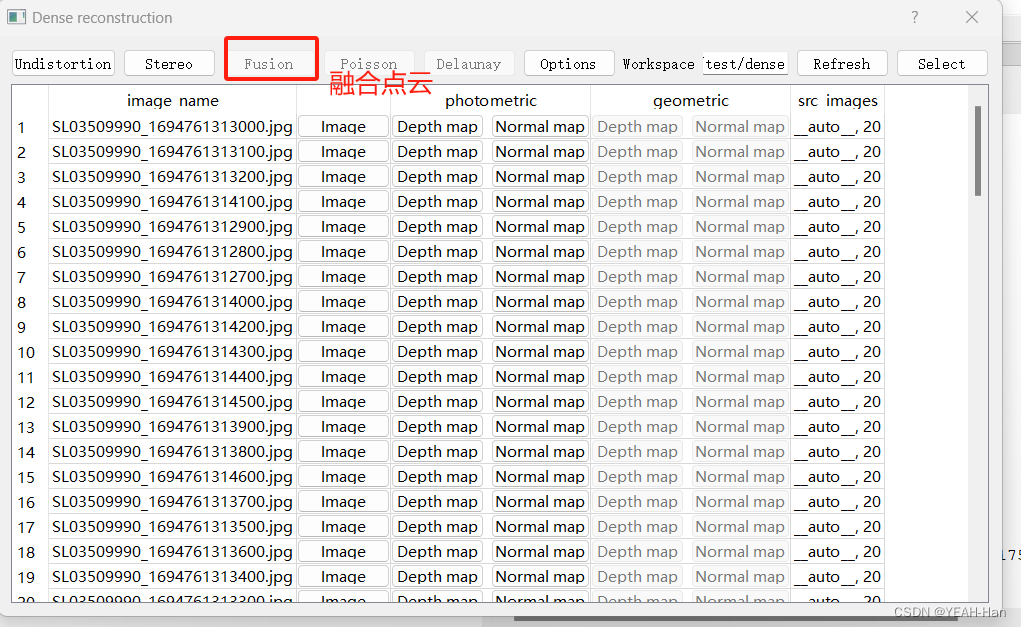
 稠密融合点云:
稠密融合点云:
【Fusion】稠密点云融合
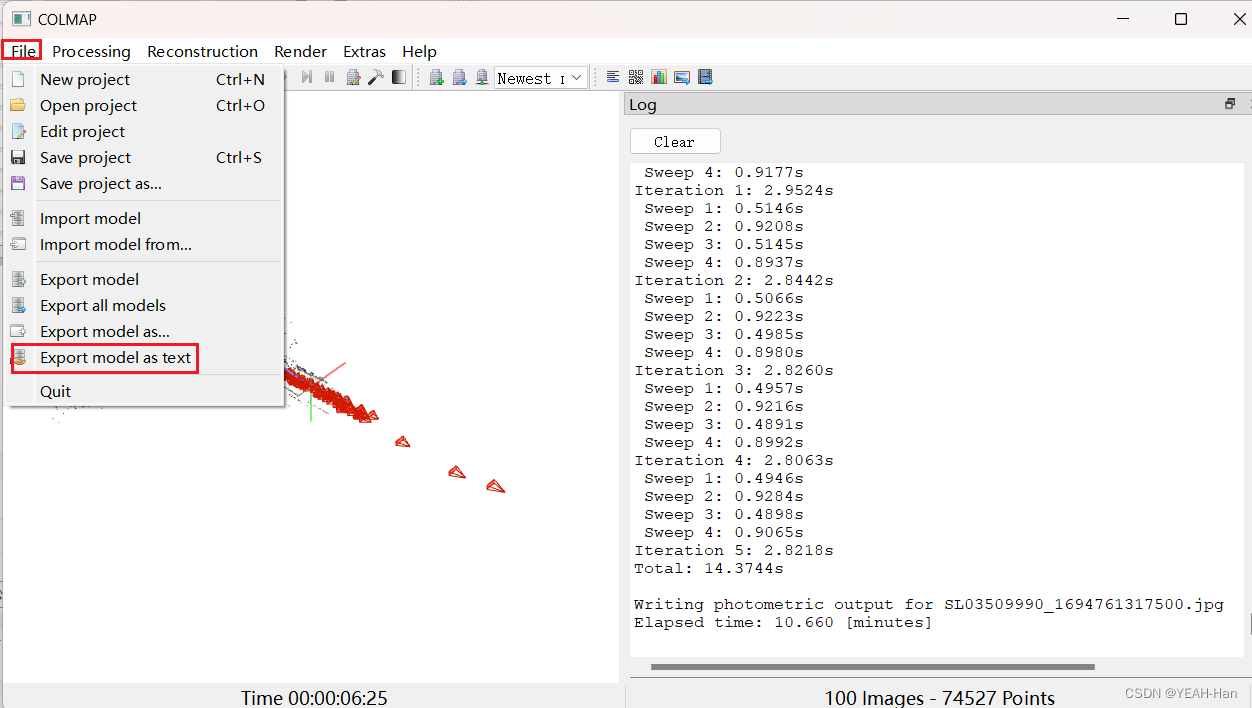
8.获取内外参txt文件:
【File】->【Export model as text】导出txt文件
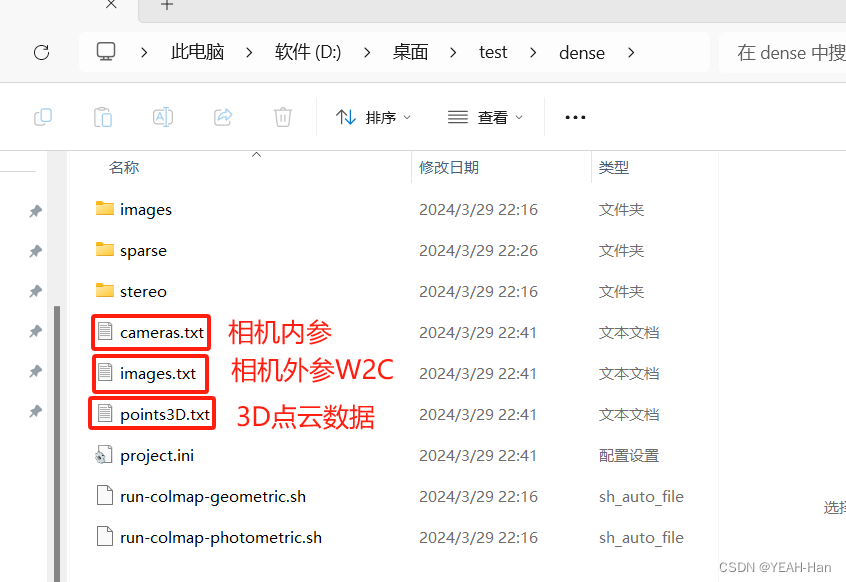
至此,colmap重建就完成了!

















 2660
2660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









