







 本文详细介绍了Colmap软件的Windows安装步骤,包括特征提取、特征匹配、SFM和MVS重建方法,以及如何处理图像数据、数据库管理和使用命令行工具。重点讲解了如何使用Colmap进行稀疏和稠密重建,以及注意事项和性能影响因素。
本文详细介绍了Colmap软件的Windows安装步骤,包括特征提取、特征匹配、SFM和MVS重建方法,以及如何处理图像数据、数据库管理和使用命令行工具。重点讲解了如何使用Colmap进行稀疏和稠密重建,以及注意事项和性能影响因素。
一、colmap的安装
1.1 Windows下安装
很简单,下载,双击,打开即可,官网地址:
COLMAP - Structure-From-Motion and Multi-View Stereo (demuc.de) https://demuc.de/colmap/如果电脑有NVIDIA显卡可以使用cuda版本,也可以不使用显卡安装no-cuda版本,如果没有NVIDIA显卡就使用no-cuda版本
https://demuc.de/colmap/如果电脑有NVIDIA显卡可以使用cuda版本,也可以不使用显卡安装no-cuda版本,如果没有NVIDIA显卡就使用no-cuda版本

解压以后双击打开
二、使用
先准备好数据,可以在官网下载一个,注意,图片数量越大越需要好的硬件(显卡或者cpu),链接:
Datasets — COLMAP 3.9-dev documentationhttps://colmap.github.io/datasets.html
2.1快速开始
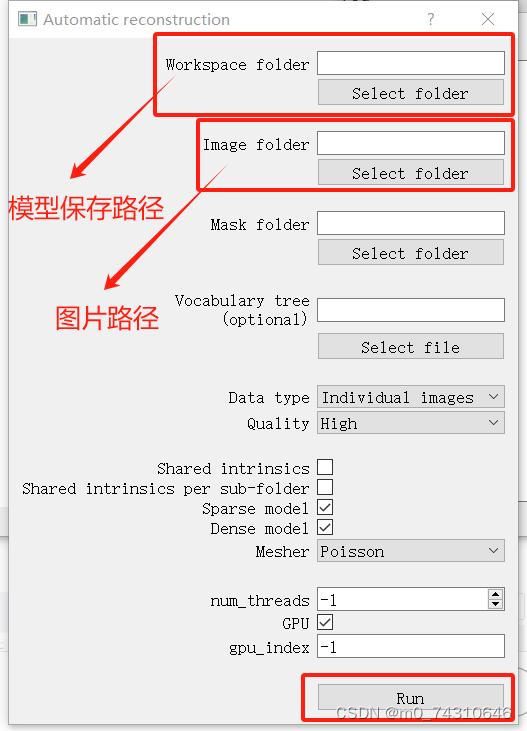
就是直接把图片重建成三维模型,只需要注意两点,一个是图片的路径,另一个是模型要保存的路径。在colmap界面依次点:Reconstruction > Automatic Reconstruction,点击以后会弹出来这个窗口,看图操作即可开始一个简单的三维重建过程!
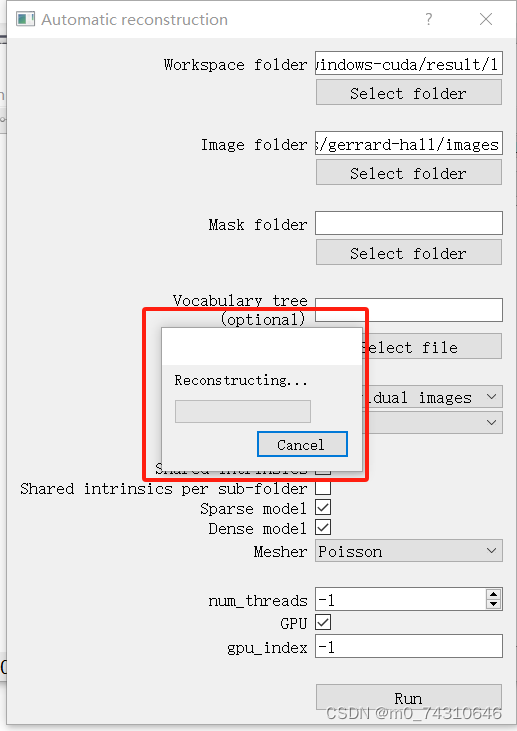
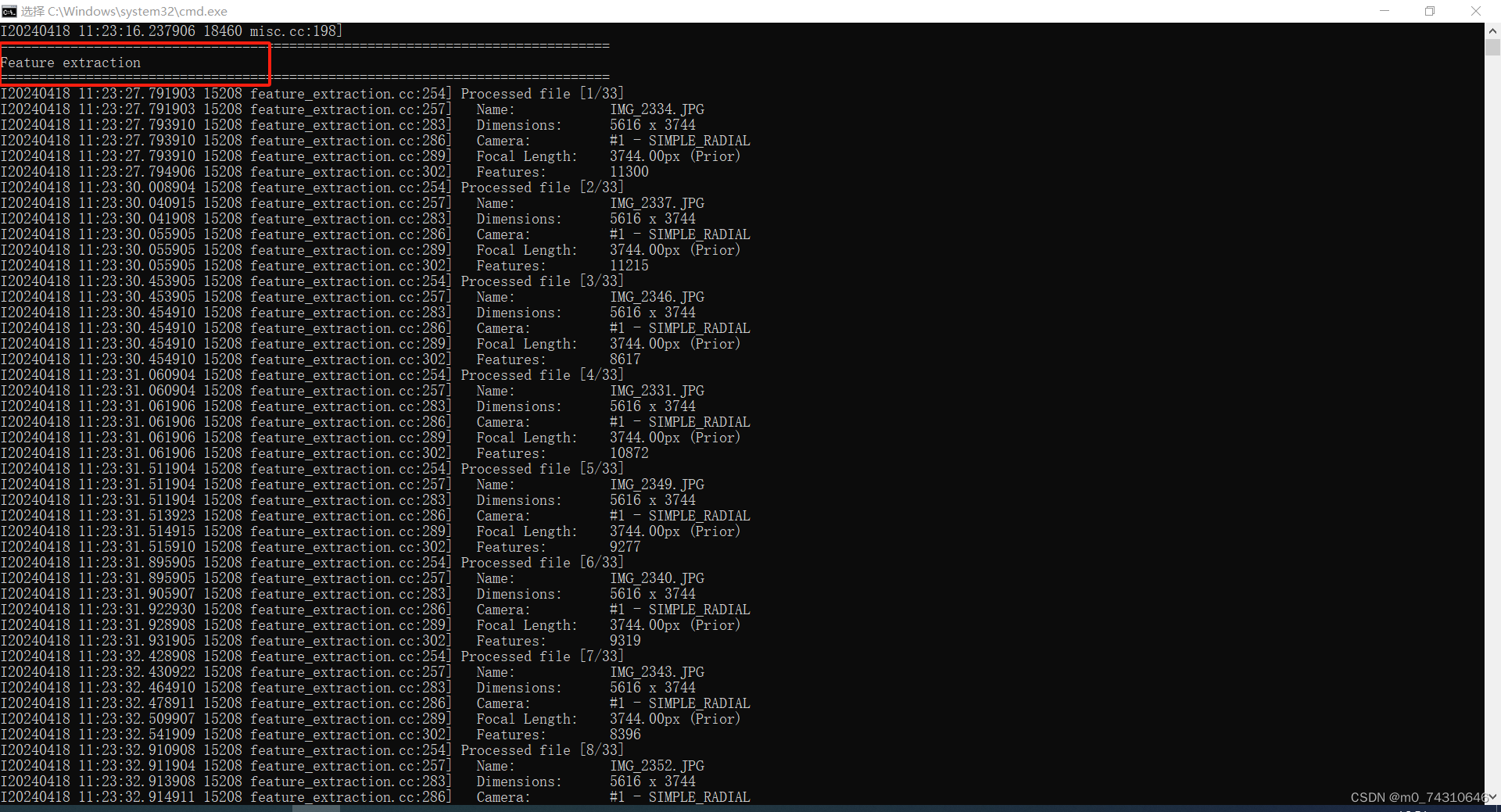
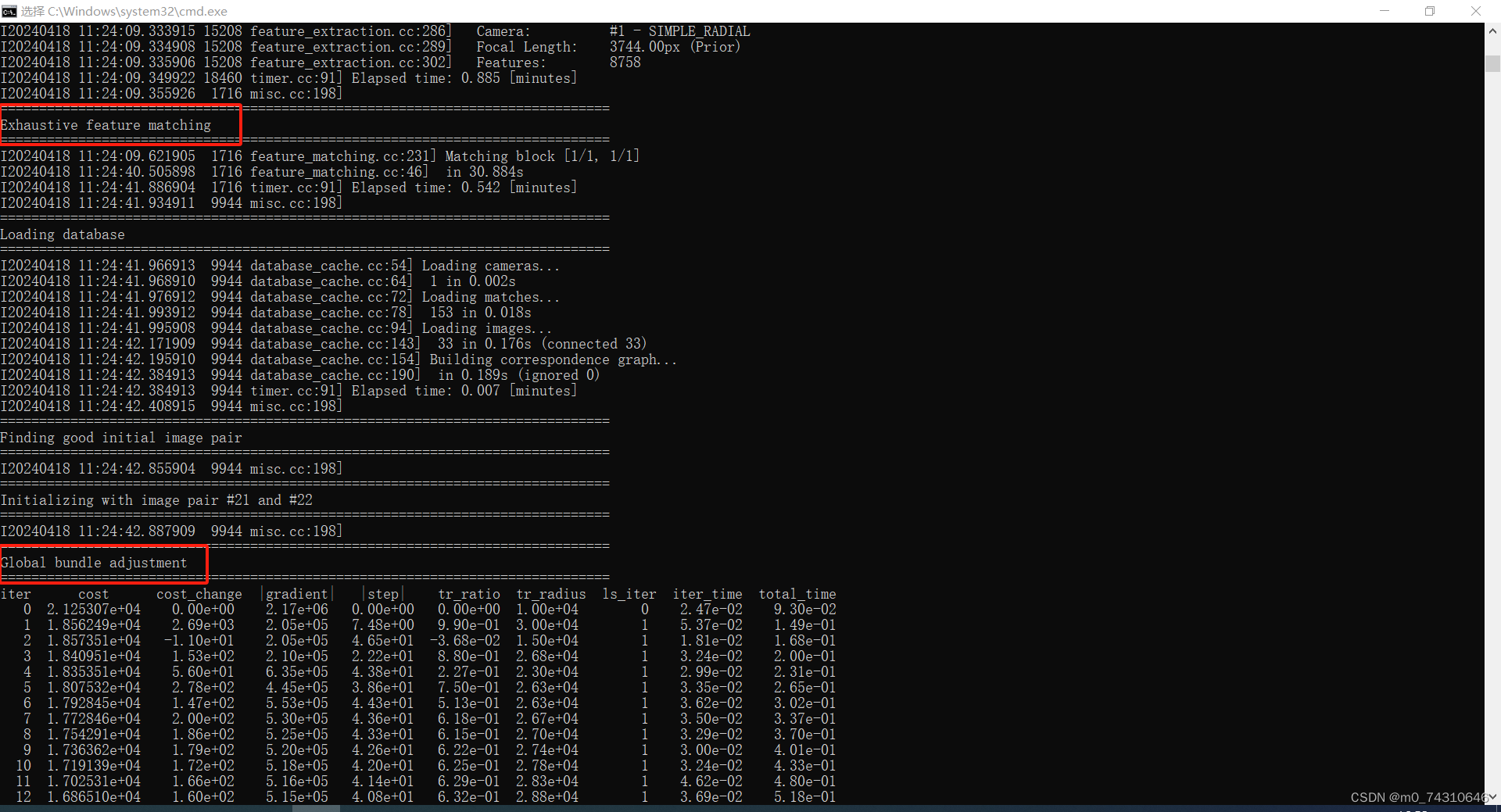
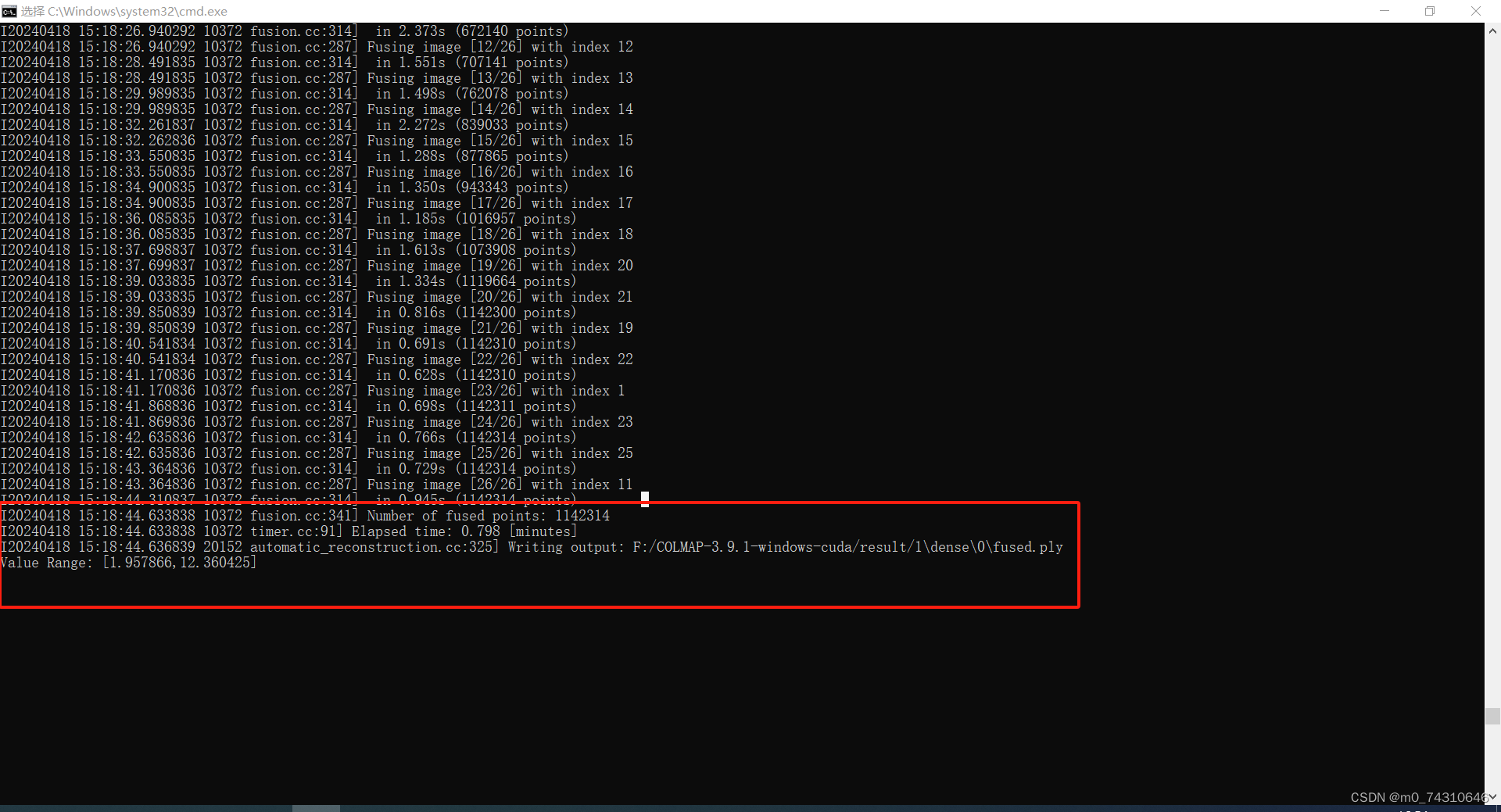
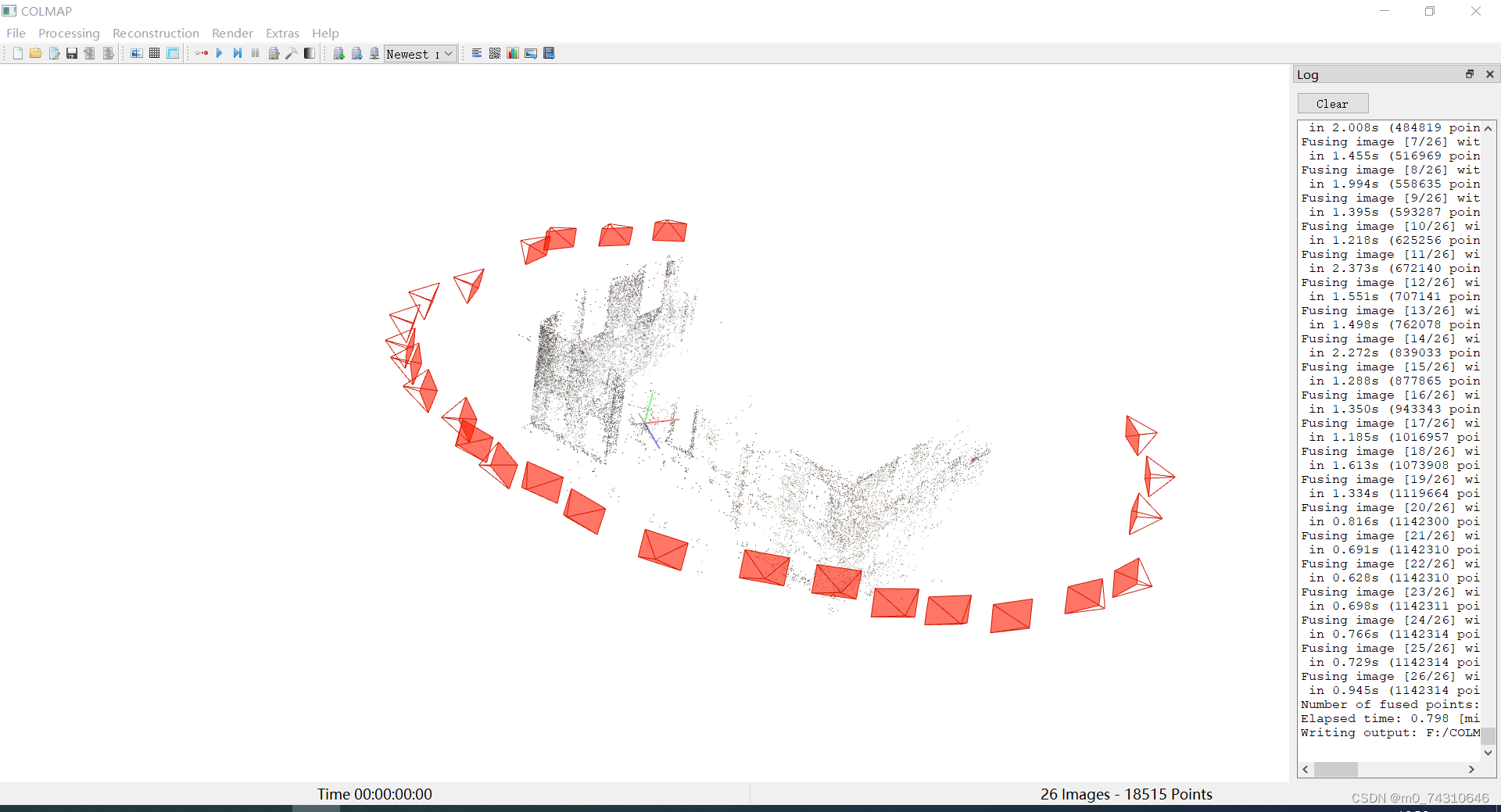
好的,现在重建开始!你的命令行/终端里面会依次自动显示类似以下信息,事实上,这就是一般的SFM重建过程,只不过一般咱们是分开执行罢了,这里因为使用了 Automatic Reconstruction所以是自动执行的。这个过程会持续一段时间,如果你的电脑显卡或者cpu比较好,会快一些。
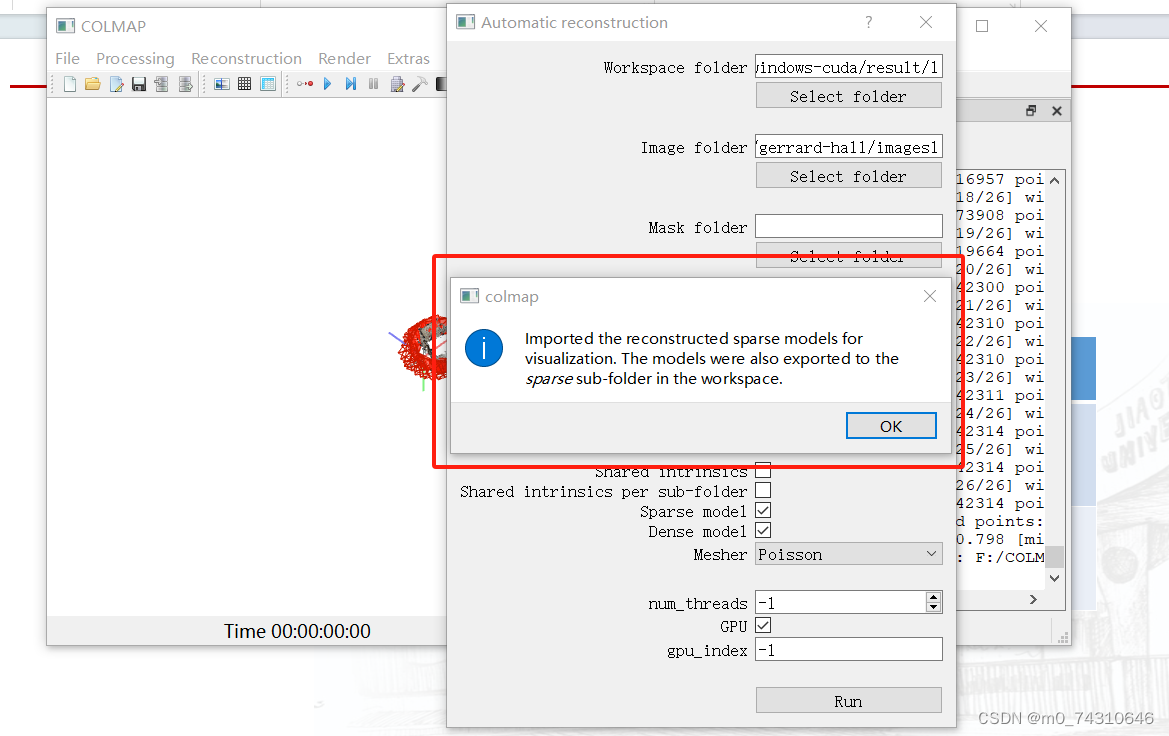
完成重建:这里提示导入重建的稀疏模型以进行可视化。这些模型还被导出到工作空间中的 sparse 下的子文件夹中。点击ok即可
然后又提示:如果想可视化一个稠密点云,依次点击File > Import model from 路径来导入,如果想查看这个稠密点云构建的mesh,可以安装meshlab来查看它,点击ok,再附上meshlab的官网:
MeshLabhttps://www.meshlab.net/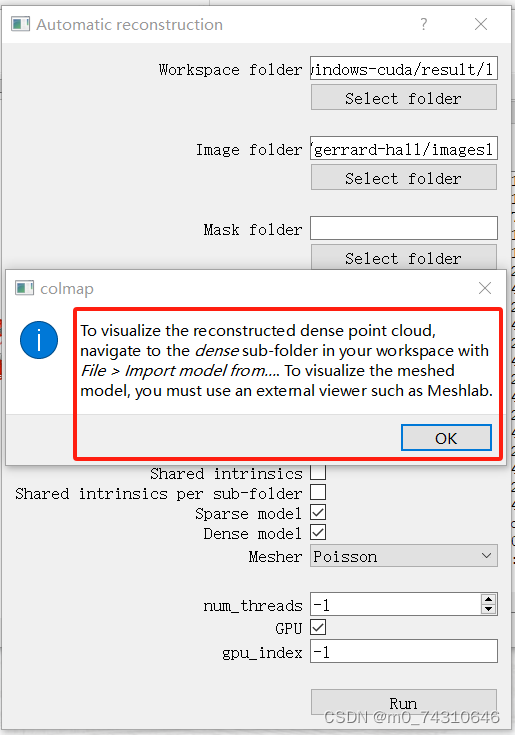
可以看到,构建好的稀疏点云如下
tips1 colmap里面输入的路径不要出现中文,否则报错!!!
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 318
318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









