






 本文讲述了在使用正点原子的例程驱动MPU6050模块时遇到的初始化问题,发现gyro和accel的st_shift_var值必须小于test.max_accel_var才成功。解决方法包括确保水平放置模块并调整test.max_accel_var的初始值。
本文讲述了在使用正点原子的例程驱动MPU6050模块时遇到的初始化问题,发现gyro和accel的st_shift_var值必须小于test.max_accel_var才成功。解决方法包括确保水平放置模块并调整test.max_accel_var的初始值。
最近使用正点原子的例程驱动MPU6050模块时发现,模块初始化失败。
追踪源码:
mpu_dmp_init() -> run_self_test() -> mpu_run_self_test(gyro, accel) -> accel_self_test(accel, accel_st)
最后跳到以下函数
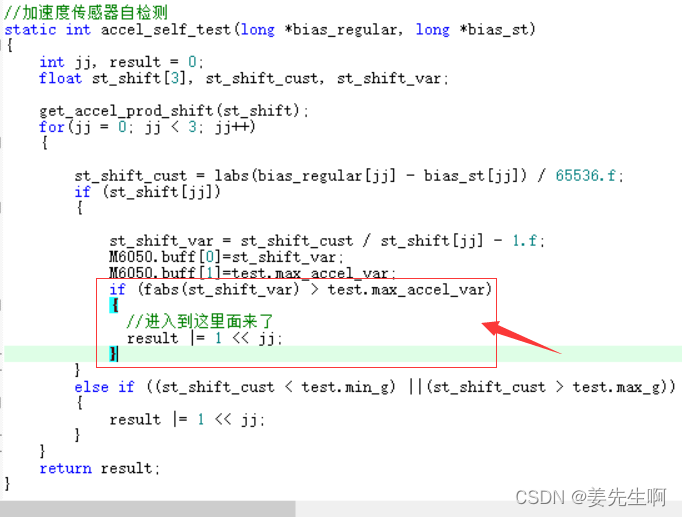
图中标记的位置中,只有当条件不成立时,才算初始化成功。
通过仿真发现。下图是仿真结果
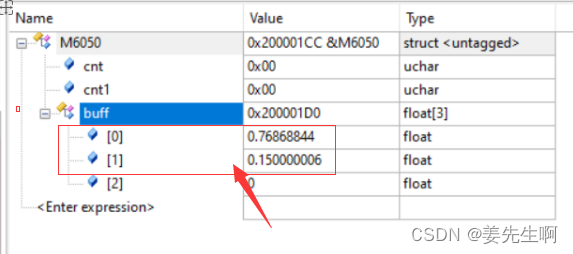
其中buff[0]是st_shift_var的值,buff[1]是test.max_accel_var的值。
既只有当st_shift_var的绝对值<test.max_accel_var的值时,才能初始化成功。
而且不同位置摆放MPU6050模块,st_shift_var的绝对值都不同,只有当水平放置模块时,st_shift_var的绝对值最接近test.max_accel_var的值,所以网上很多的网友说要水平放置模块才能初始化成功。大部分情况下也是这样的。必须水平放置模块才能初始化成功。
但是本人在驱动模块时发现不管怎么摆放,st_shift_var的绝对值始终大于test.max_accel_var的值,最终本人的解决方法是将test.max_accel_var的初始化值从0.14改为0.15。这时水平放置模块时,st_shift_var的绝对值约为0.14,小于test.max_accel_var的值0.15。模块初始化成功。
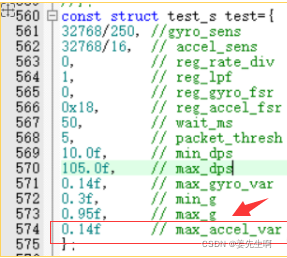
以上的图在inv_mpu.c源文件里可以找到。
至于test.max_accel_var的初始化值的设置是否有什么说法,暂时还未去深究,后面有结果会继续更新。

















 9505
9505

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









