






我的激光雷达是速腾激光雷达。
首先calibration_toolkit已经把点云话题写死了,所以我们只能修改rosbag话题,修改方法如下:
rosbag play bagName.bag /rslidar_points:=/points_raw
即在播放rosbag的时候修改,上面/rslidar_points原来的话题,/points_raw为我们要改成的话题。
roscore
cd calibration //新的终端
source devel/setup.bash
rosrun calibration_camera_lidar calibration_toolkit
运行以上命令会弹出以下窗口
选择/usb_cam/image_raw
选择Camera->Velodyne
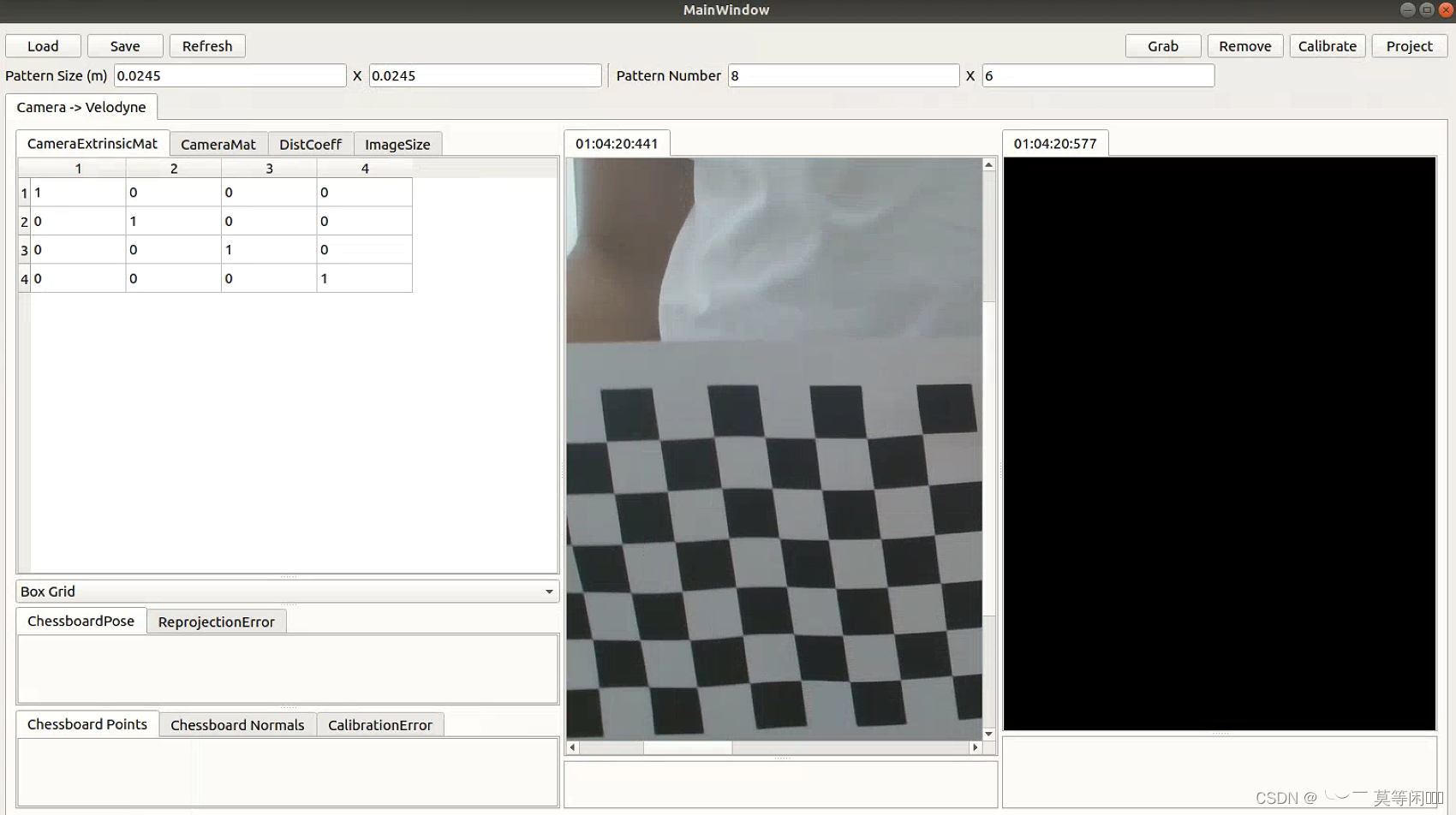
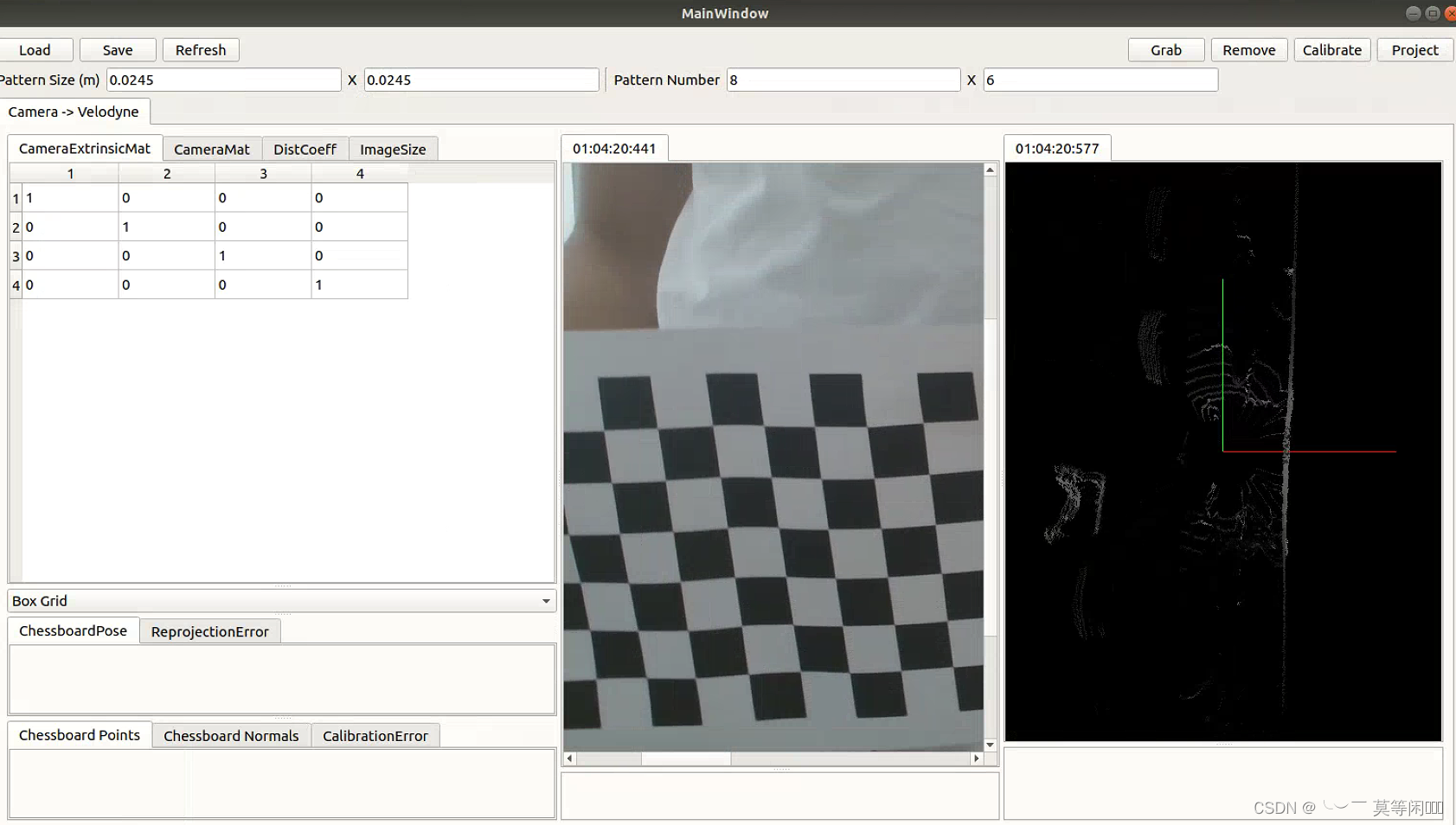
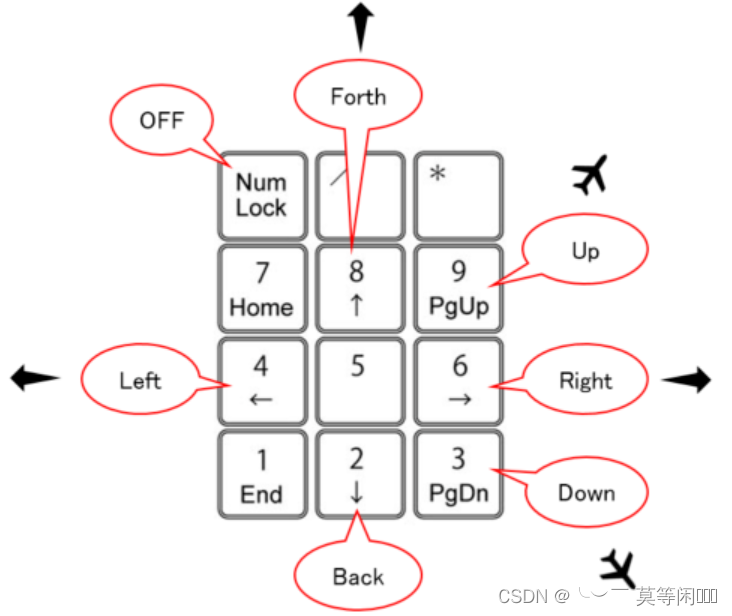
然后弹出以下画面,会看到右边窗口是黑的没有点云,这时我们点击右边窗口点云区域,然后按 ↓ 这个键就可以看到点云了。
工具操作按键:
-
1.右侧数字小键盘中“上”,“下”,“左”,“右”,“PgUp”以及“PgDn”这六个按键用于平移激光点云。
-
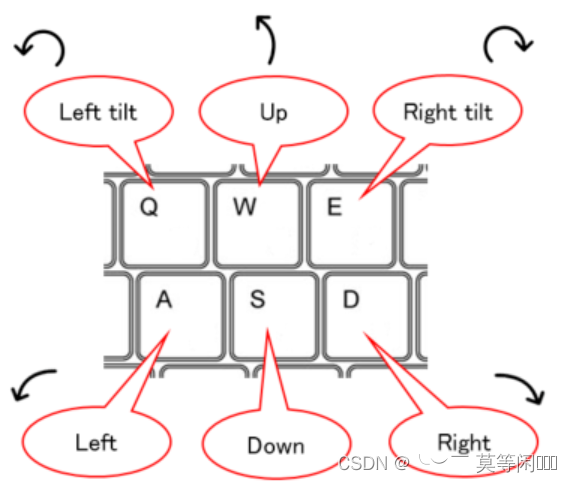
2.a、d、w、s、q、e用来旋转激光点云。
-
3.数字“1”,“2”用来设置是
perspective projection透视投影还是orthogonal projection正交投影。 -
4.用“o”,“p”控制点云的大小,o变小,p变粗。
-
5.用“-”,“+”控制放大,缩小。
















 4304
4304











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











