







1、先获取激光雷达与IMU标定的文件
关于激光雷达与IMU标定可以参考我另一篇博客:
下载链接:

关于如何创建ros工作空间可以参考我另一篇博客
sudo apt-get install -y ros-melodic-navigation
sudo apt-get install -y ros-melodic-robot-localization
sudo apt-get install -y ros-melodic-robot-state-publisher
sudo add-apt-repository ppa:borglab/gtsam-release-4.0
sudo apt install libgtsam-dev libgtsam-unstable-dev
cd ~/catkin_ws
catkin_make此次可能会遇到以下问题:
C++: internal conpiler error: Killed (program cc1plus)Please subnit a full bug report,
with preprocessed source if appropriate.
See <file:///usr /share/doc/gcc-7/README.Bugs> for instructions.
LIO-SAM/CNakeFiles/lio_san_napOptnization.dir /build.nake:62: recipe for target 'LIO-SAM/CMakeFiles/lio_san_napOptnization.dir /src/mapoptnization.cpp.o' failednake[2]: ***[LIO-SAM/CNakeFiles/lio_san_napOptnization.dir /src/mapoptnization.cpp.o] Error 4
CMakeFiles/Makefile2:2868: recipe for target 'LIO-SAN/CMakeFiles/lio_san_napOptnmization.dir/all' failed
make[1]:***[LIO-SAM/CMakeFiles/lio_san_nap0ptnization.dir/all] Error 2make[1]:***waiting for unfinished jobs... .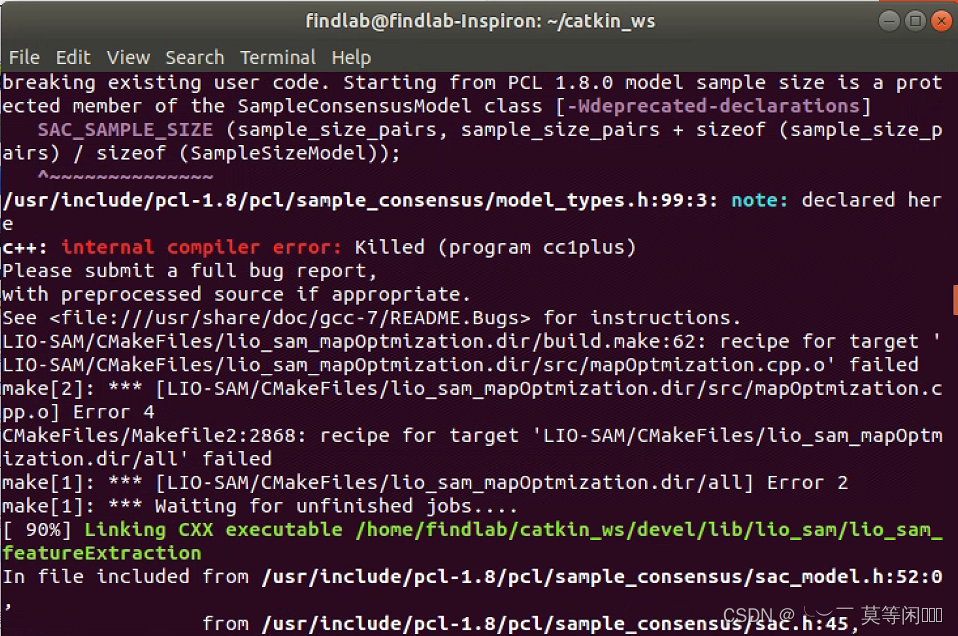
原因是未找到libtbb.so.2相关的库
解决方法:
在终端中搜索该库所在位置:
locate libtbb.so.2 
然后在LIO-SAM文件夹中的CMakeLists.txt文件中对应的位置加入以下代码
"/usr/lib/x86_64-linux-gnu/libtbb.so.2"

最后重新编译catkin_make就没问题了

















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











