






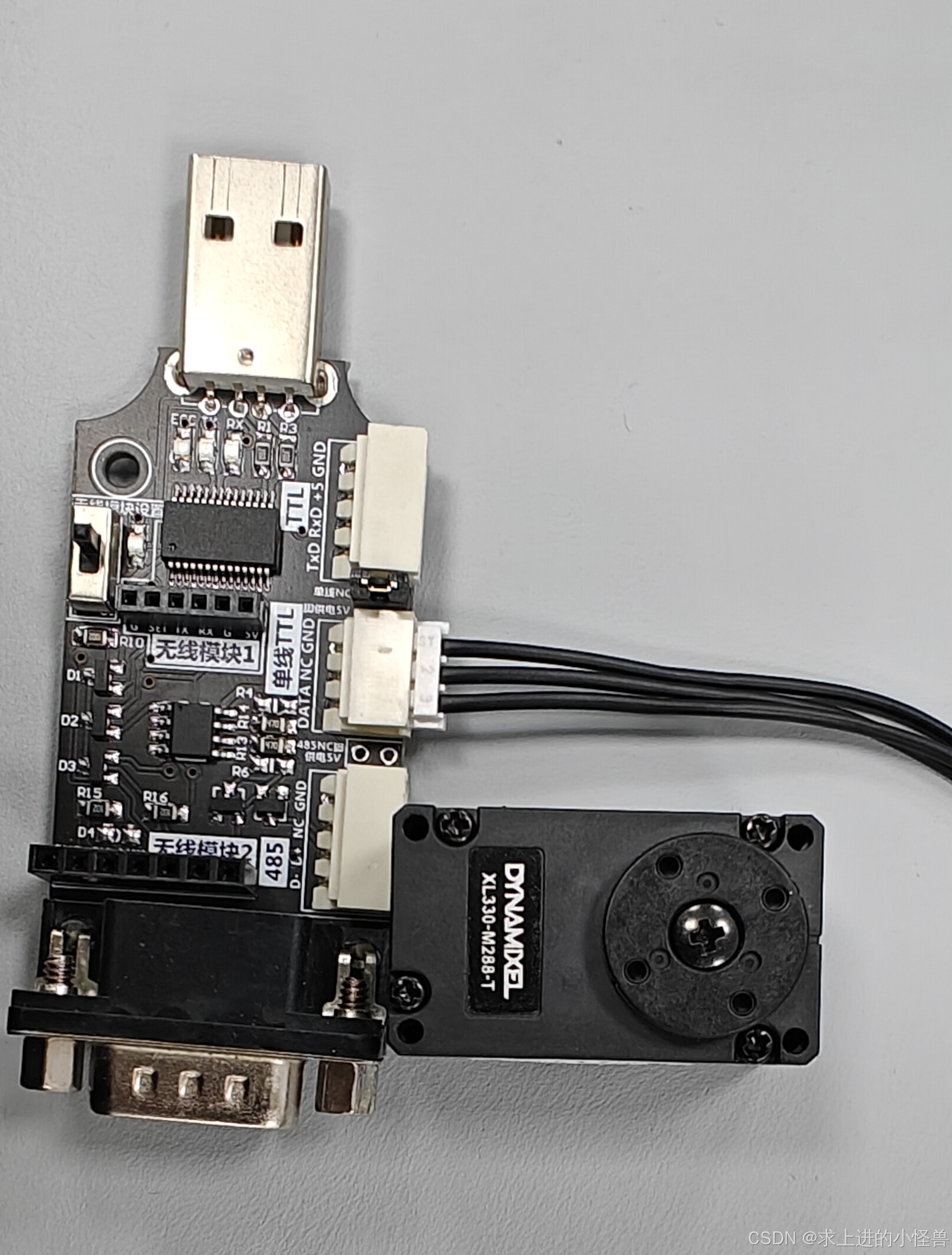
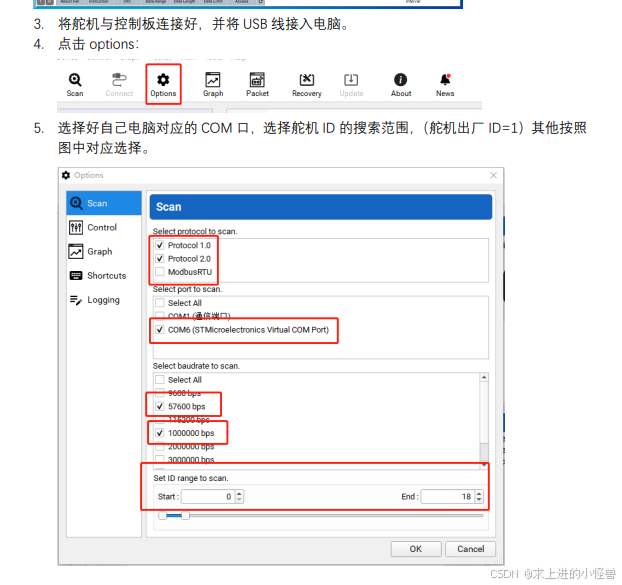
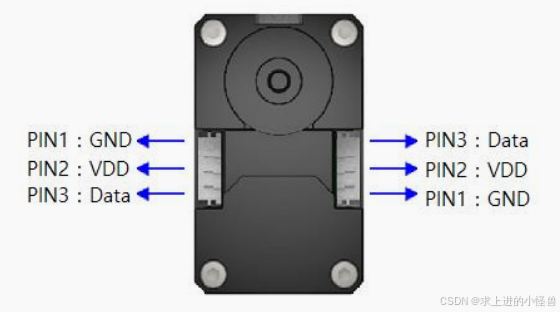
1.连接配置
2.控制模式解读
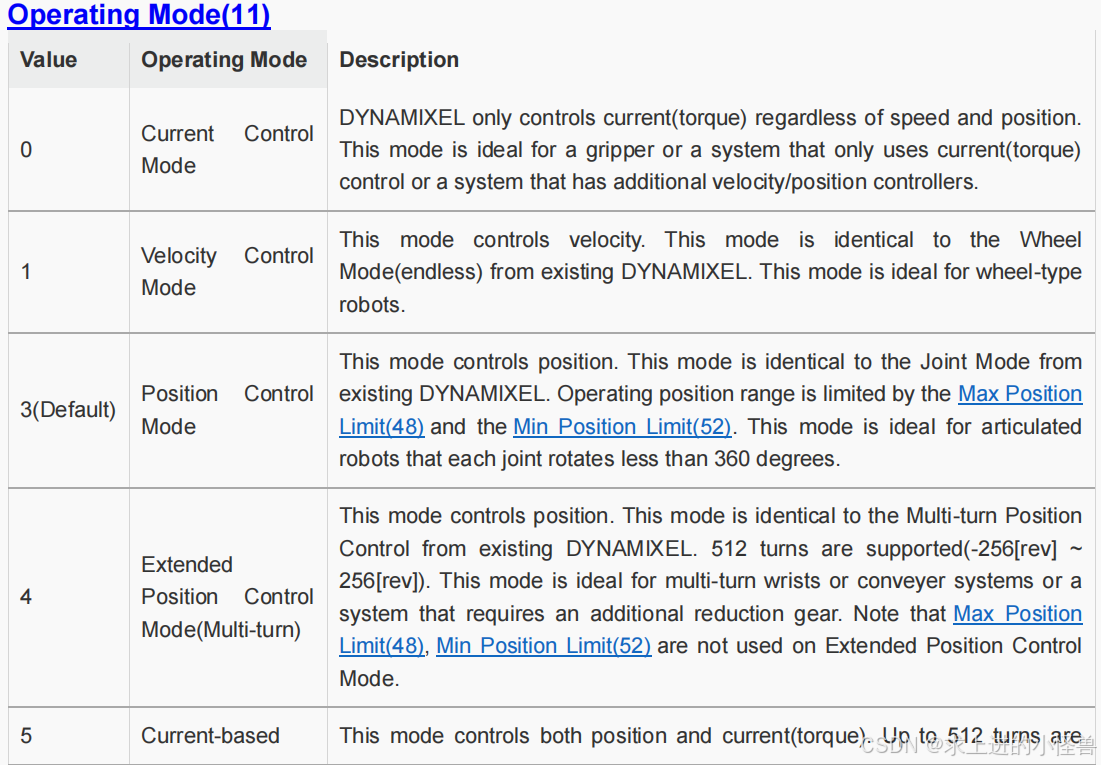
1)电流控制模式
DYNAMIXEL仅控制电流(扭矩),而不考虑速度和位置。这种模式非常适合夹持器或仅使用电流(扭矩)控制的系统,或具有额外速度/位置控制器的系统。
2)速度控制模式
此模式与现有的DYNAMIXEL中的轮模式相同,比较适合于轮式驱动。
3)位置控制模式(默认)
此模式控制位置。此模式与现有的关节模式相同。操作位置范围受最大位置限制(48)和最小位置限制(52)的约束。此模式非常适合每个关节旋转角度小于360度的关节式机器人。
4)扩展位置控制模式(多圈位置扩展)
此模式控制位置。此模式与现有DYNAMIXEL中的多圈位置控制相同。支持512圈(-256圈[转] ~ 256圈[转])的范围。此模式非常适合多圈旋转的手腕、输送系统或需要额外减速齿轮的系统。请注意,在扩展位置控制模式下,不使用最大位置限制(48)和最小位置限制(52)。
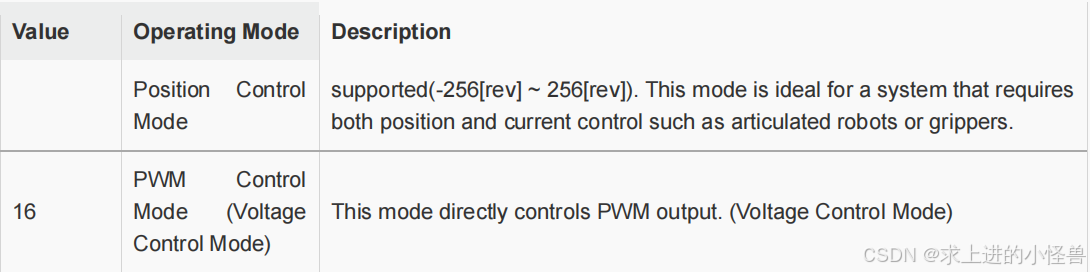
5)基于电流的位置控制模式
此模式同时控制位置和电流(扭矩)。支持最多512圈旋转(-256圈[转] ~ 256圈[转])。此模式非常适合需要同时控制位置和电流的系统,如关节式机器人或夹持器。
6)PWM控制模式(电压控制模式)
此模式直接控制PWM输出。(电压控制模式)
范围是-885~885,代表不同的旋转速度,而且,它可以转512圈。
3.通信协议解读
1)指令包
 A. 报头:现场指示数据包的开始
A. 报头:现场指示数据包的开始
B.
保留位
: 0x00 (
不能用
0xFD)
C.
ID
:
Dynamixel ID
指定的指令包处理
D.
指令包的长度(2 字节)
①
[
命令
] [
参数
] [
校验低位
] [
校验高位
] ,
即
:[
参数
]
长度
+ 3.
一个0x00 算一个
E.
命令(1 字节)
: 要求舵机执行的指令
F.
参数:
命令的辅助数据
,
是必需的。具体要取决于命令。
2)返回数据包

A. 报头, 保留位, ID, 指令包长度, 16bit CRC 校验位 (跟指令包相同)
B. 指令固定为 0x55
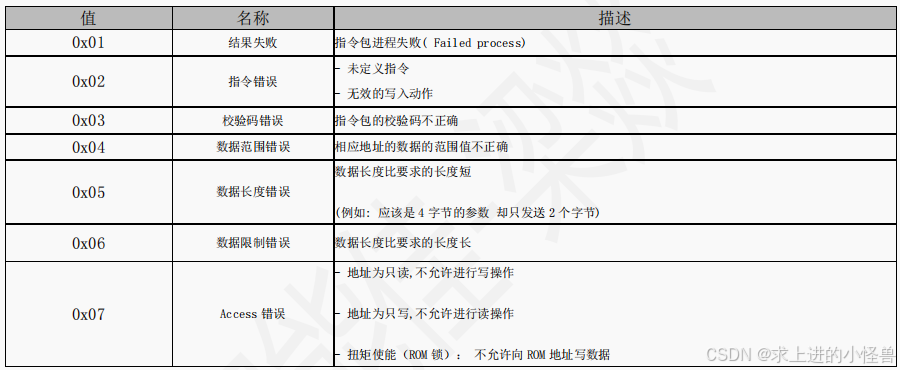
C. 错误 :
指令包错误结果(如下图所示)
D.
参数是指令包的指令字段值
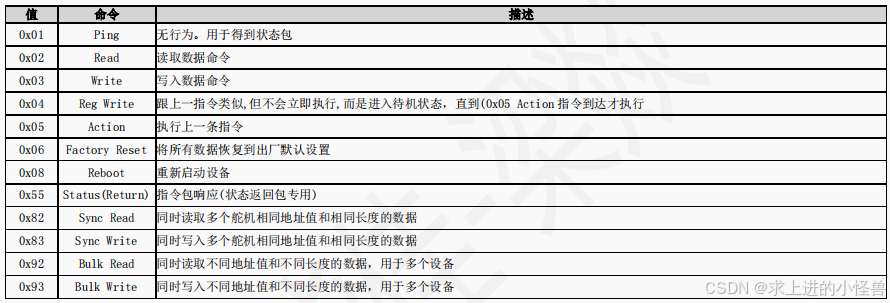
3)命令解读
① Ping命令(0x01)
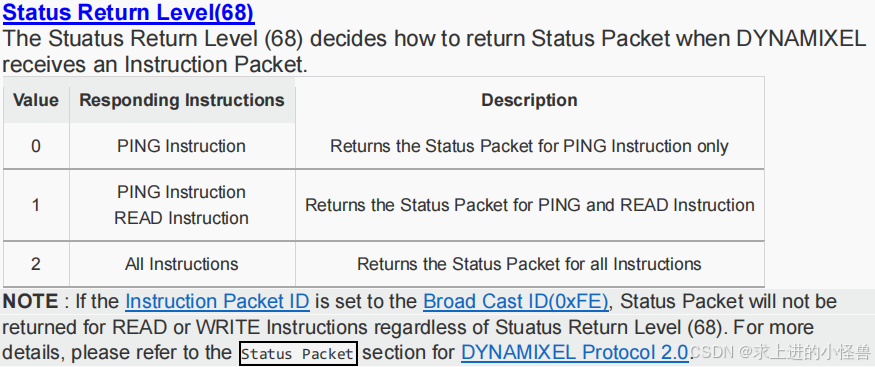
检查设备是否存在基本信息、响应级别。
指令包参数:

② Read 读命令(0x02)
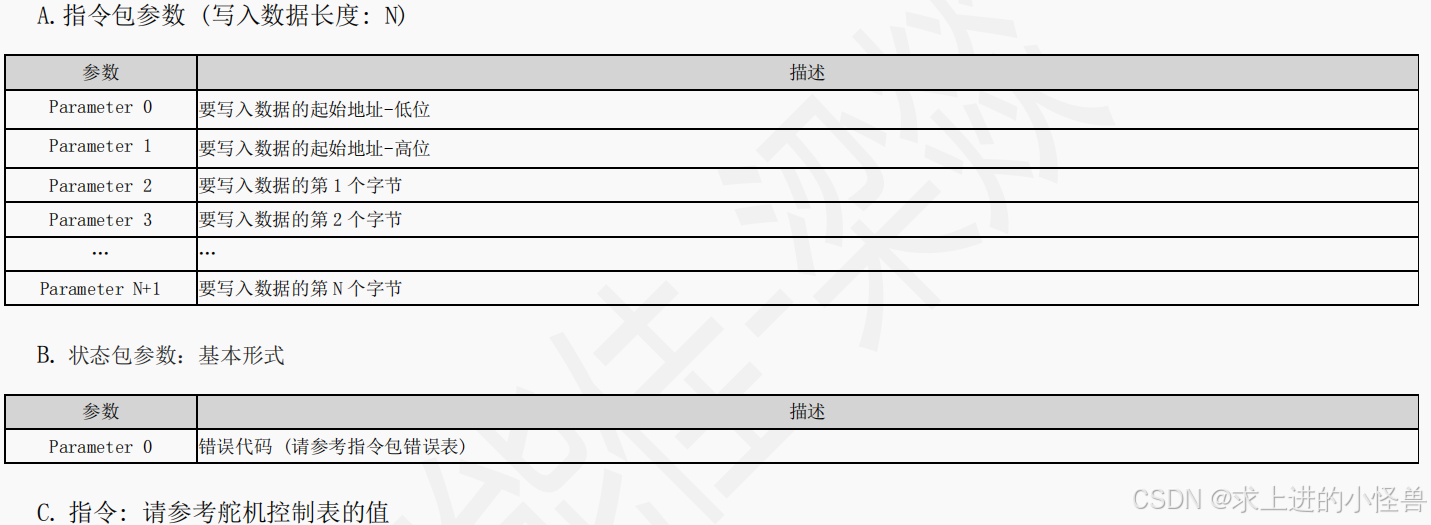
A.指令包参数



③ Write 写指令(0x03)
④ Reg Write寄存器写入(0x04)
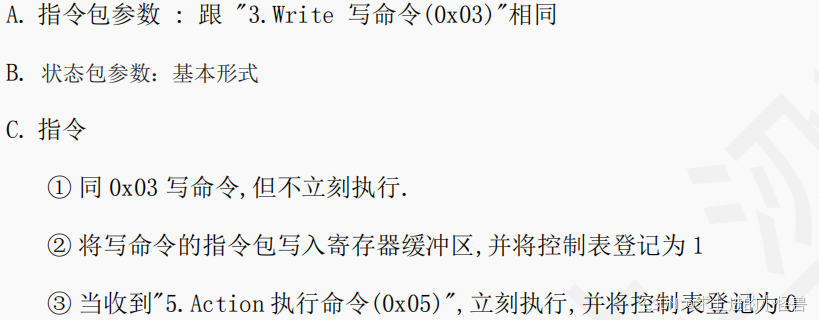
⑤ Action执行命令(0x05)
6. Factory Reset恢复出厂设置(0x06)
7. Reboot重启命令(0x08)
8. Sync Read 同步读操作(0x82)
9. Sync Write同步写操作(0x83)
10. Bulk Read 批量读操作(0x92)
11. Bulk Write 批量写操作(0x93)
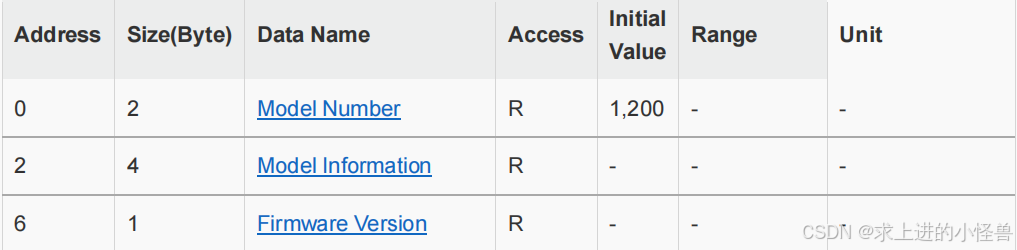
4) 电机控制表
控制表是在设备中实现的数据结构。用户可以读取特定的数据,用读取指令包获取设备的状态,也可以修改数据,用写指令包控制设备。
控制表分为RAM和EEPROM两个区域。重新上电时,RAM数据会重置,EEPROM数据会保持。
只有将扭矩关闭时
Torque Enable() is cleared to ‘0’(Torque
OFF),才能写入EEPROM区域中的数据。
启动电机运动之前需要先启动扭矩。
注意:负值采用两个补值。
1)Control Table of EEPROM Area
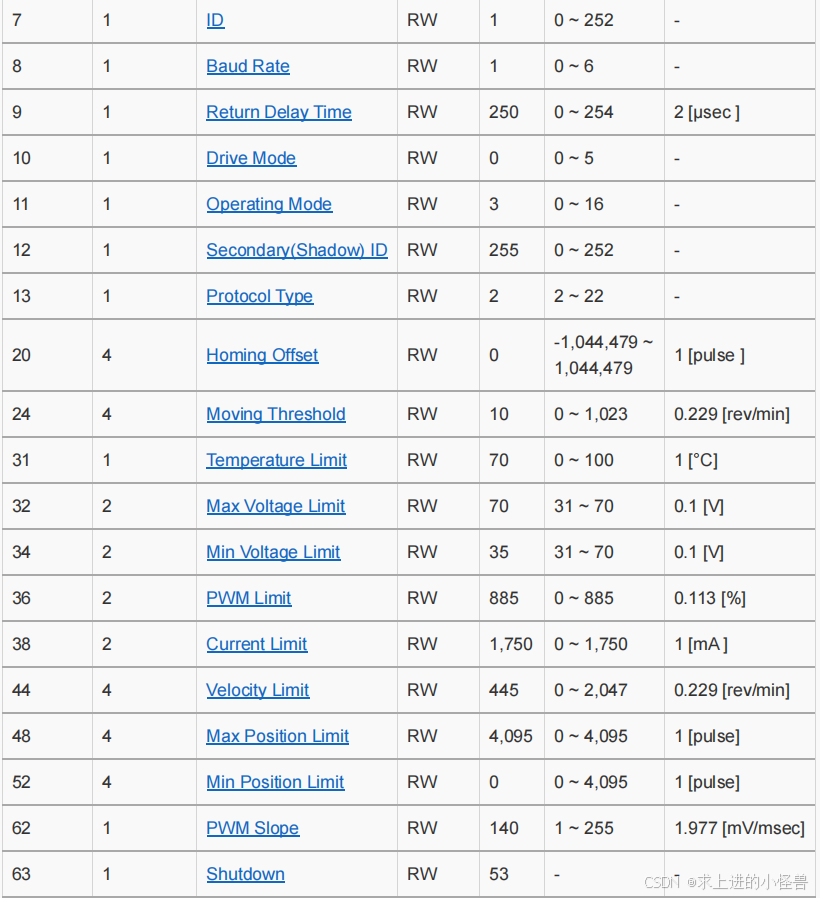
- Drive Mode(10) :地址为10的Drive Mode Bit 0 值设置为1时,转向反转。

-
Operating Mode(11) :地址为11的操作模式,默认为地址控制
-
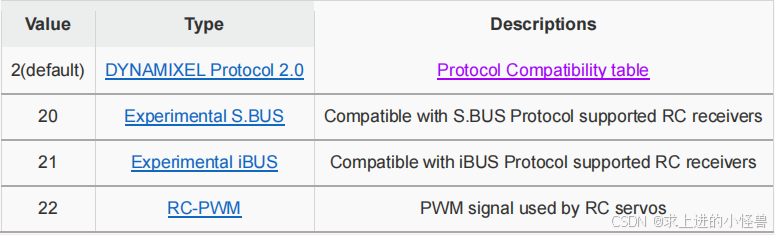
Protocol Type(13)
-
2)Control Table of RAM Area
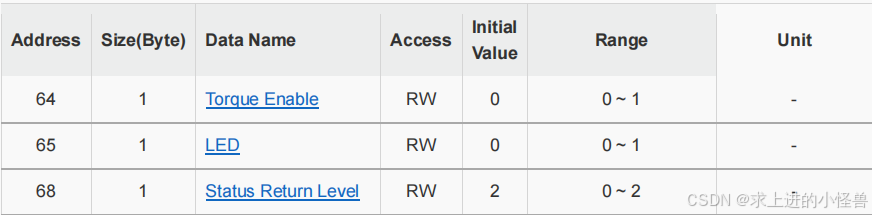


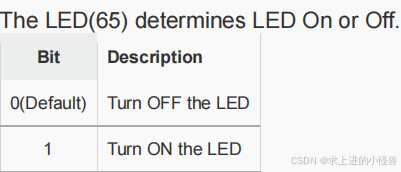
- LED(65)
- 开启扭矩

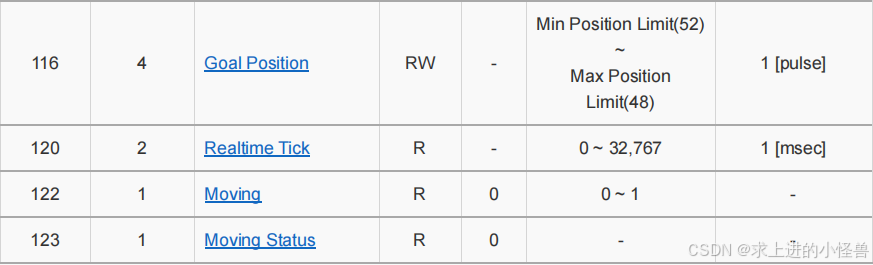
- 设定位置(写指令)1[rev] : 0 ~ 4,095

- 读取位置(读数据)

- 读取电压

-
测试命令
- 读电压:0xFF 0xFF 0xFD 0x00 0x01 0x07 0x00 0x02 0x90 0x00 0x01 0x00 0x18 0x9B
- (实发数据) FF FF FD 00 01 07 00 02 90 00 01 00 18 9B
- 开启扭矩:0xFF 0xFF 0xFD 0x00 0x01 0x06 0x00 0x03 0x40 0x00 0x010 0xDB 0x66
- (实发数据) FF FF FD 00 01 06 00 03 40 00 01 DB 66
- 关闭扭矩:0xFF 0xFF 0xFD 0x00 0x01 0x06 0x00 0x03 0x40 0x00 0x00 0xDE 0xE6
- (实发数据) FF FF FD 00 01 06 00 03 40 00 00 DE E6
- 写角度:
- 0xFF 0xFF 0xFD 0x00 0x01 0x09 0x00 0x03 0x74 0x00 0x00 0x08 0x00 0x00 0x42 0x89
- (实发数据) FF FF FD 00 01 09 00 03 74 00 00 08 00 00 42 89
- (0~0;180~2048;359~4095)
- 读角度:0xFF 0xFF 0xFD 0x00 0x01 0x07 0x00 0x02 0x84 0x00 0x04 0x00 0x1D 0x15
- (实发数据) FF FF FD 00 01 07 00 02 84 00 04 00 1D 15
- 返回角度值之后,参数解读:低位-高位 0801~2049~180°

- 打开LED :0xFF 0xFF 0xFD 0x00 0x01 0x06 0x00 0x03 0x41 0x00 0x01 0xCC 0xE6
- (实发数据) FF FF FD 00 01 06 00 03 41 00 01 CC E6
后续PX4 配置舵机相关资料(控制协议)
舵机性能参数:
| 属性 | 数值 |
| 重量 | 18[g] |
| 体积 (W*H*D) |
20.0 x 34.0 x 26.0 [mm]
|
| 齿比 | 288.4:1 |
| 失速扭矩 |
0.52 [N.m] (at 5.0 [V], 1.47 [A])
|
| 空载速率 |
103 [rev/min] (at 5.0 [V])
|
| 通信协议 | 单线TTL
(8bit, 1stop, No Parity)
|
| 输入电压 |
3.7 ~ 6.0 [V] (推荐5V)
|
| 反馈信息 | 位置、速度、电流、输入电压等。 |



















 1830
1830

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











