






GitHub - AlexanderKoch-Koch/low_cost_robot
简单介绍:
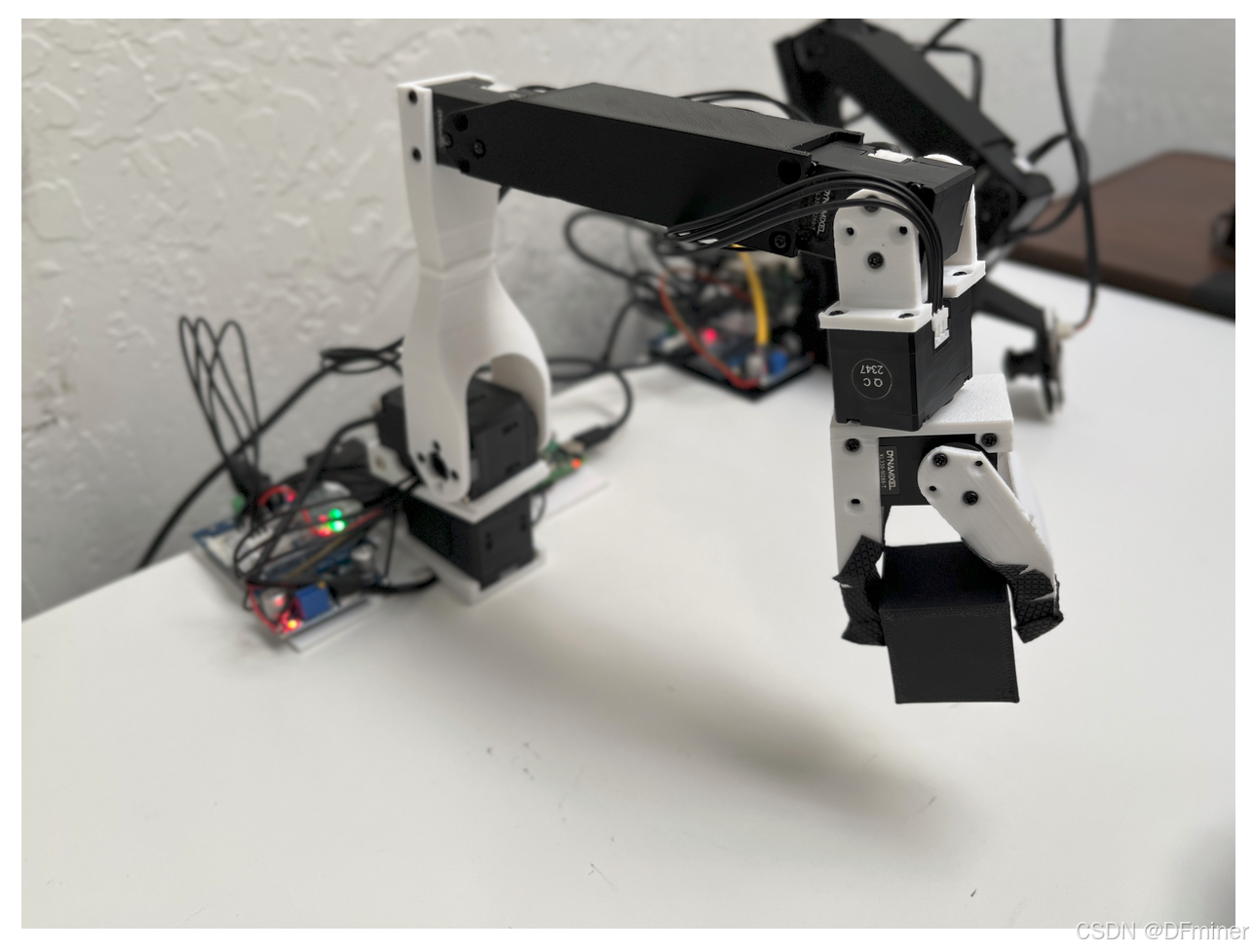
这是一个低成本的机器人手臂项目,包括跟随者手臂(Follower Arm)和领导者手臂(Leader Arm)的设计与组装指南。
-
跟随者手臂:
- 使用Dynamixel XL430和XL330伺服电机。
- 成本约为$258。
- 包括材料清单和组装步骤。
-
领导者手臂:
- 使用6个Dynamixel XL330-M077伺服电机。
- 成本约为$183。
- 用于控制跟随者手臂,装配相对简单。
-
模拟环境:
- 提供了MuJoCo中的基本模拟环境,通过运行
simulation.py脚本来启动。
- 提供了MuJoCo中的基本模拟环境,通过运行
两个手臂可以通过编写Python脚本来控制,并且提供了示例脚本teleoperation.py来测试手臂的功能。
MuJoCo(Multi-Joint dynamics with Contact)是一个高级的物理模拟引擎,主要用于机器人学、生物力学、图形学和动画等领域。它的特点包括:
- 高性能:MuJoCo的核心引擎采用C语言编写,经过优化以达到高性能的模拟速度。
- 准确度:能够精确模拟复杂的物理现象,特别是涉及多关节系统的接触动力学。
- 场景描述:用户可以通过MJCF(MuJoCo XML Configuration Format)这种易于阅读和编辑的XML文件格式来定义模拟场景。
- 支持多种模型格式:除了原生的MJCF格式外,还可以加载URDF(Unified Robot Description Format)模型文件。
- 交互式可视化:自带原生GUI和OpenGL渲染支持,便于可视化模拟结果。
- API接口:提供了C/C++ API,方便集成到其他应用程序中。
- 计算工具:提供了大量的实用函数,用于计算与物理相关的各种量。
MuJoCo最初是由Emo Todorov开发的,并在2021年由DeepMind收购并开源。它是强化学习和机器人研究领域的常用工具之一。
项目目录:
- low_cost_robot-main
- hardware
- follower
- step
- follower_arm.f3z
- step
- leader
- step
- leader_arm.f3z
- step
- follower
- pictures
- simulation
- low_cost_robot
- assets
- low-cost-arm.urdf
- low-cost-robot.xml
- scene.xml
- interface.py
- init.py
- assets
- low_cost_robot
- .gitignore
- dynamixel.py
- LICENSE
- README.md
- requirements.txt
- robot.py
- simulation.py
- teleoperate_real_robot.py
- teleoperate_simulated_robot.py
- hardware
目录描述:
-
hardware
- 这个目录包含了硬件设计相关的文件。
- follower
- 包含了“follower”机器人手臂的设计文件。
- step
follower_arm.f3z: 这是一个FreeCAD文件,用于3D设计和建模,可能是用来设计或展示follower机器人的机械结构。
- leader
- 包含了“leader”机器人手臂的设计文件。
- step
leader_arm.f3z: 同样是一个FreeCAD文件,用于3D设计和建模,可能是用来设计或展示leader机器人的机械结构。
-
pictures
- 可能存放的是项目的图像资料,如设计草图、成品照片等。
-
simulation
- 这个目录包含了模拟相关的文件。
- low_cost_robot
- assets
low-cost-arm.urdf: URDF文件,用于描述机器人模型,通常用于ROS(Robot Operating System)环境中。low-cost-robot.xml: MuJoCo XML配置文件,用于描述模拟环境中的机器人模型。scene.xml: MuJoCo XML文件,可能描述了整个模拟场景。
- interface.py: Python脚本,可能是用于与模拟环境进行交互的接口。
__init__.py: 标记此目录为Python包的初始化文件。
- assets
-
.gitignore
- 文件忽略规则,用于配置版本控制系统(如Git)忽略某些文件或目录。
-
dynamixel.py
- Python脚本,可能用于控制Dynamixel伺服电机,这些电机常用于低成本机器人项目。
-
LICENSE
- 许可证文件,说明了项目的使用许可条款。
-
README.md
- 项目的介绍文档,通常包含了项目的概述、安装指南、使用方法等。
-
requirements.txt
- 列出了项目依赖的Python包及其版本。
-
robot.py
- Python脚本,可能是用于控制实际机器人硬件的代码。
-
simulation.py
- Python脚本,可能是用于设置和运行模拟的代码。
-
teleoperate_real_robot.py
- Python脚本,用于远程控制真实的机器人。
-
teleoperate_simulated_robot.py
- Python脚本,用于远程控制模拟中的机器人。


















 1470
1470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











