






前言
内模控制(Internal Model Control,IMC) 是一种用于控制系统中的模型,基于模型预测和误差补偿的原理。其核心思想是在控制系统中加入一个内部模型,通过与实际系统输出进行比较,并根据差异进行补偿控制,从而实现对系统的精确控制。
1.内模控制(IMC)结构
内模控制的系统框图如下图所示,其中
G
c
G_c
Gc是控制器,
G
G
G是被控对象,
G
f
G_f
Gf是滤波器,
G
^
\hat G
G^是内部模型;
y
r
y_r
yr和
v
v
v为系统输入,分别是设定值和干扰,
y
y
y为系统输出。
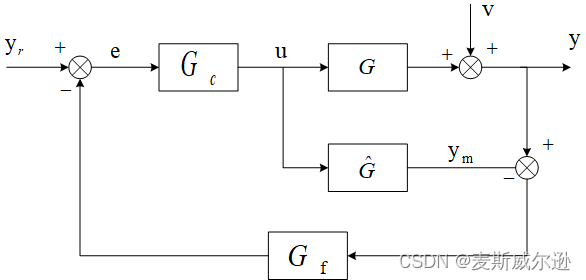
根据梅森增益公式可以得到系统的传递函数为 y ( k ) = G c ( z ) G ( z ) 1 + G c ( z ) G f ( z ) [ G ( z ) − G ^ ( z ) ] y r ( k ) + 1 − G c ( z ) G f ( z ) G ^ ( z ) 1 + G c ( z ) G f ( z ) [ G ( z ) − G ^ ( z ) ] v ( k ) y(k)=\frac{G_c(z)G(z)}{1+G_c(z)G_f(z)[G(z)-\hat G(z)]}y_r(k)+\frac{1-G_c(z)G_f(z)\hat G(z)}{1+G_c(z)G_f(z)[G(z)-\hat G(z)]}v(k) y(k)=1+Gc(z)Gf(z)[G(z)−G^(z)]Gc(z)G(z)yr(k)+1+Gc(z)Gf(z)[G(z)−G^(z)]1−Gc(z)Gf(z)G^(z)v(k)
2.内模控制(IMC)特性
性质1 对偶稳定性
当内部模型与被控对象匹配时,即 G ( z ) = G ^ ( z ) G(z)=\hat G(z) G(z)=G^(z)时,使滤波器 G f ( z ) = 1 G_f(z)=1 Gf(z)=1,系统可以视为一个开环系统。其传递函数为 y ( k ) = G c ( z ) G ( z ) y r ( k ) + [ 1 − G c ( z ) G ( z ) ] v ( k ) y(k)=G_c(z)G(z)y_r(k)+[1-G_c(z)G(z)]v(k) y(k)=Gc(z)G(z)yr(k)+[1−Gc(z)G(z)]v(k)可以看出,如果对象开环稳定,控制器也稳定,则整个系统必然稳定,也称IMC具有对偶稳定性。
性质2 理想控制器
当内部模型与被控对象匹配时, G ( z ) = G ^ ( z ) G(z)=\hat G(z) G(z)=G^(z),设计控制器, G c ( z ) = G ^ − 1 ( z ) G_c(z)=\hat G^{-1}(z) Gc(z)=G^−1(z)(若逆模型存在),使滤波器 G f ( z ) = 1 G_f(z)=1 Gf(z)=1,则根据IMC的传递函数可以得到 y ( k ) = y r ( k ) y(k)=y_r(k) y(k)=yr(k)同时干扰传递函数为0,说明干扰对输出无影响。
性质3 零稳态偏差
若闭环模型稳定,当模型与对象失配时,即 G ( z ) ≠ G ^ ( z ) G(z)\neq \hat G(z) G(z)=G^(z)时,使滤波器 G f ( z ) = 1 G_f(z)=1 Gf(z)=1,可以得到系统输出与设定值之间的偏差: E ( k ) = y r ( k ) − y ( k ) = 1 − G c ( z ) G ^ ( z ) 1 + G c ( z ) [ G ( z ) − G ^ ( z ) ] [ y r ( k ) − v ( k ) ] E(k)=y_r(k)-y(k)=\frac{1-G_c(z)\hat G(z)}{1+G_c(z)[G(z)-\hat G(z)]}[y_r(k)-v(k)] E(k)=yr(k)−y(k)=1+Gc(z)[G(z)−G^(z)]1−Gc(z)G^(z)[yr(k)−v(k)]只要设计控制器 G c ( z ) = G ^ − 1 ( z ) G_c(z)=\hat G^{-1}(z) Gc(z)=G^−1(z),即可让 E ( k ) = 0 E(k)=0 E(k)=0,即对阶跃输入和扰动,稳态偏差为零。
性质4 鲁棒性
在模型失配的情况下,且闭环不稳定时,可以通过调节滤波器 G f ( z ) G_f(z) Gf(z)来改变系统的稳定性,因此称IMC具有鲁棒性。
总结
IMC可以应用到多种领域,同时也为分析一些其他控制算法的性质提供了结构框架。


















 1269
1269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











