







论文题目:Perception-aware Receding Horizon Navigation for MAVs
作者:Zhang, Zichao ; Scaramuzza, Davide
作者机构:苏黎世大学
论文链接:https://files.ifi.uzh.ch/rpg/website/rpg.ifi.uzh.ch/html/docs/ICRA18_Zhang.pdf
研究目的:为了安全、准确地到达指定的目的地,同时最小化其状态估计的不确定性。
主要贡献:
- 利用前向单目相机用于状态估计和建图。
- 利用单目状态估计和地图系统的信息,生成一个候选轨迹库,并从感知质量、碰撞概率和到目标的距离三个方面对每条轨迹进行评分,选择得分最高的轨迹。
- 在一个实际的四旋翼机上通过仿真和实际实验证明,与纯反应式导航系统相比,文中的主动式导航方法能够提高目标到达任务的状态估计精度,特别是在困难场景(例如,弱纹理)下。
1 前言
微型飞行器(MAVs)既灵活又通用,适用于工业检测、农业和货物运输等各种任务。为了使无人机能够在未知环境中自主运行,需要可靠的定位和对自身位姿的估计。在用于状态估计的不同传感器中,摄像机重量轻且节能,非常适合于微型飞行器。
在对于基于视觉的状态估计中,摄像机的运动对估计精度有重要影响。因此,在规划无人机的运动时,既要考虑以上的任务,又要考虑感知质量。
本文的设计思路是一个典型的ActiveSLAM问题,作者选择了使状态估计精度最大化的运动,使得无人机在运行过程中不至于发生定位丢失,而且他们没有摒弃了优化全局地图中的运动轨迹的方法,而是用滚动的方式来解决主动SLAM问题,这样有效地降低了计算资源。
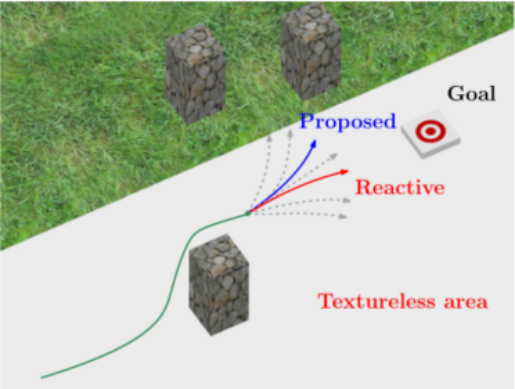
形象说明:他们算法的示意图如上所示,这个方法遵循图中蓝色轨迹运动,这个轨迹可以避开障碍物、到达指定的目的地并且最小化状态估计的不确定性。相比之下,纯反应式导航方案(红色线)虽然距离更近,但会进入无纹理区域,导致状态估计误差大,最终无法到达指定的目的地。
2 本文架构
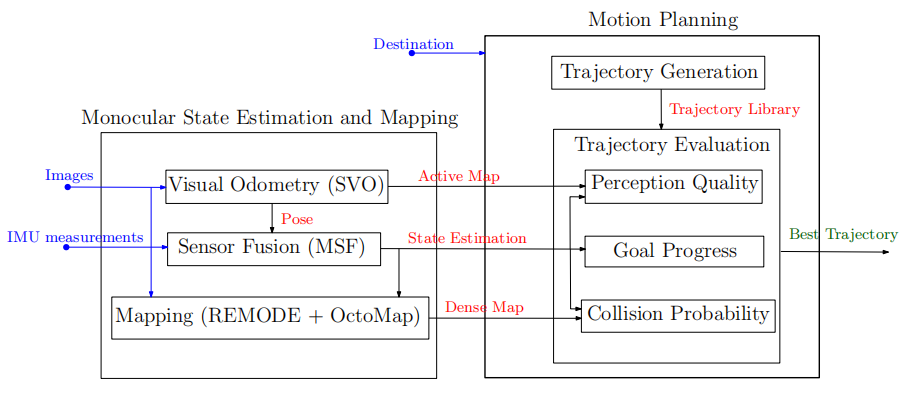
该系统包括单目状态估计和建图系统以及运动规划系统。
-
单目状态估计和建图系统:首先使用SVO来估计摄像机的6自由度姿态。利用多传感器融合(MSF)软件将姿态估计与IMU测量进一步融合,得到正确的尺度和额外的速度估计。然后,将状态估计值和图像输入REMODE的变体,得到正面视图的密集三维地图。在使用稠密地图进行运动规划之前,利用OctoMap来降低地图中的噪声。
-
运动规划系统:由轨迹生成模块和轨迹评估模块组成。使用一种有效的轨迹生成方法,根据当前状态估计生成候选轨迹库。然后,我们根据感知质量、碰撞概率和到目标的距离三个指标评估每个轨迹。
3 单目状态估计与建图
文中的单目状态估计和建图采用SVO+MSF进行状态估计,通过REMODE生成稠密点云进行避障。SVO是一种非常有效的VO算法,适用于资源受限的系统(无人机)。
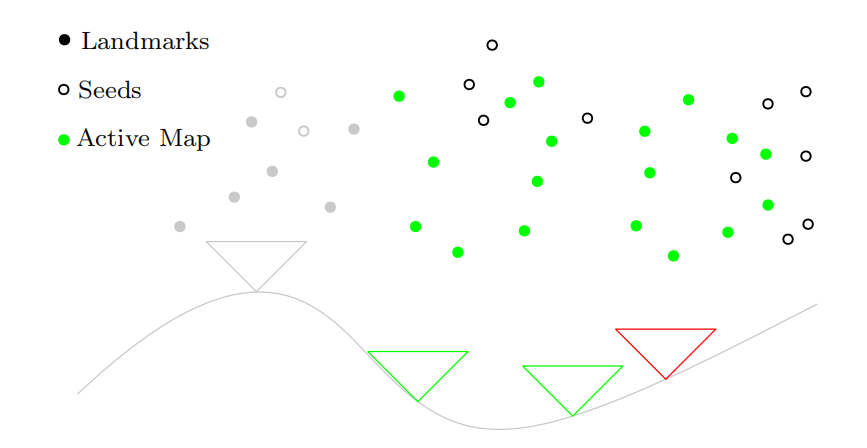
首先,为了评估感知质量,他们还从SVO中提取一个活动地图。在内部SVO维护一组稀疏点,这些点可以分为标志和种子两类。
- 标志点是从不同的帧多次观测到的三维点,它们的位置已经得到了很好的估计,对帧姿态估计的准确性贡献最大
- 种子是三维点,其位置尚未精确估计。
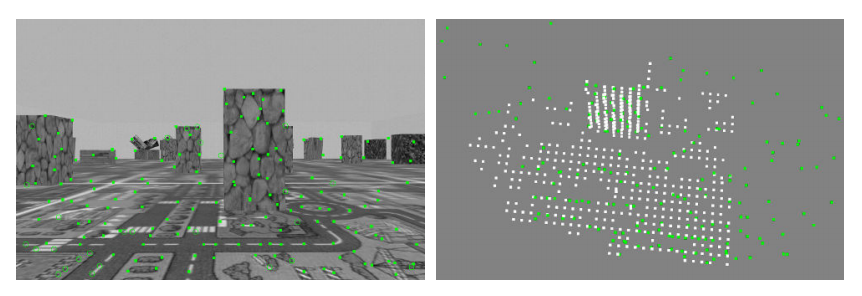
然后从与当前帧重叠的关键帧中提取可见的标志,我们将这些标志记为活动地图(图3)。
其次,使用Octomap来进一步降低REMODE输出中的噪声。如果密集点云包含过多的离群值,轨迹评估模块会错误估计碰撞概率,导致不必要的避碰机动。图4展示了活动地图和稠密地图,分别用MA和MD表示。
4 轨迹生成
轨迹生成函数:
f
(
t
)
←
g
(
p
0
,
v
0
,
p
f
,
t
f
)
f(t)← g(p_{0},v_{0},p_{f},t_{f})
f(t)←g(p0,v0,pf,tf)
p0和v0是轨迹在世界坐标系中的初始位置和速度,来自当前状态估计。pf是轨迹的期望终点,tf是四旋翼跟随轨迹到达pf所需的时间。输出是函数f(t)。对于t∈[0,tf],f(t)给出了时刻t时轨道上的状态(位置、方向、速度)。
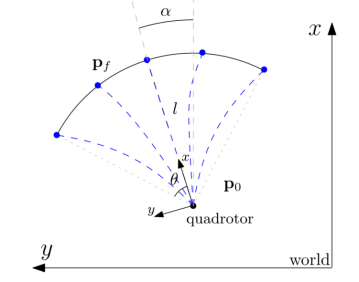
因为使用了前视摄像机,希望在前方可见的方向移动,所以通过选择四旋翼前面一段弧上的端点来规划轨迹,如下图所示。这样只需要知道圆弧的半径r和角度θ即可,当半径r为一个设计参数时(固定值),θ的计算公式为:
θ
=
m
a
x
(
k
θ
∣
∣
v
0
,
θ
m
a
x
)
\theta = max(k_{\theta}||v_{0},\theta_{max})
θ=max(kθ∣∣v0,θmax)
其中kθ是常数。直观地说,θ随着速度的增加而增加,直到达到最大值θmax。然后使用θ和l,就可以均匀地采样弧上的端点。在生成N个候选轨迹后,以一个固定的时间间隔从每个轨迹上采样J个姿态。
然后根据以下公式,选择得分最高的轨迹Cbest驱动无人机运动:
C
b
e
s
t
=
a
r
g
m
a
x
(
1
−
p
c
o
l
)
(
R
p
e
r
c
+
R
g
o
a
l
)
+
p
c
o
l
R
c
o
l
C_{best}=argmax(1-p_{col})(R_{perc}+R_{goal})+p_{col}R_{col}
Cbest=argmax(1−pcol)(Rperc+Rgoal)+pcolRcol
其中pcol是碰撞障碍物的概率(即密集地图)。Rcol、Rperc和Rgoal分别给出了与碰撞风险、感知质量和目标进度相关的奖励,使用D-opt标准的模拟形式来计算感知质量,其他具体推导在这里不展开,感兴趣可以阅读原文。
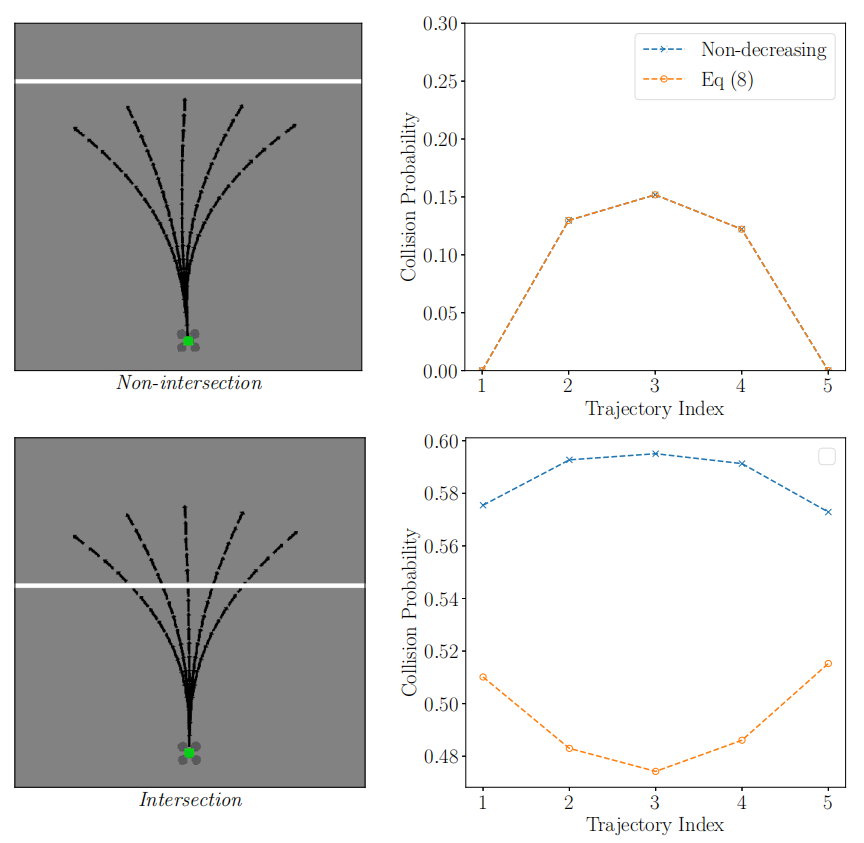
下图展示碰撞概率的计算。左栏显示模拟轨迹(黑色箭头)和障碍物(水平白带),右栏显示使用不同方法计算的碰撞概率。轨迹指数从左向右增加。
5 实验
5.1 仿真实验
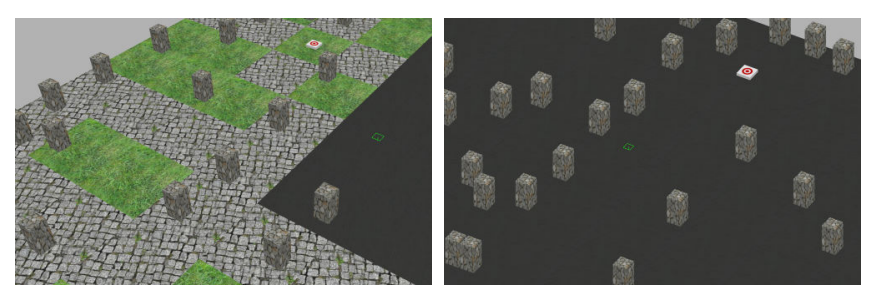
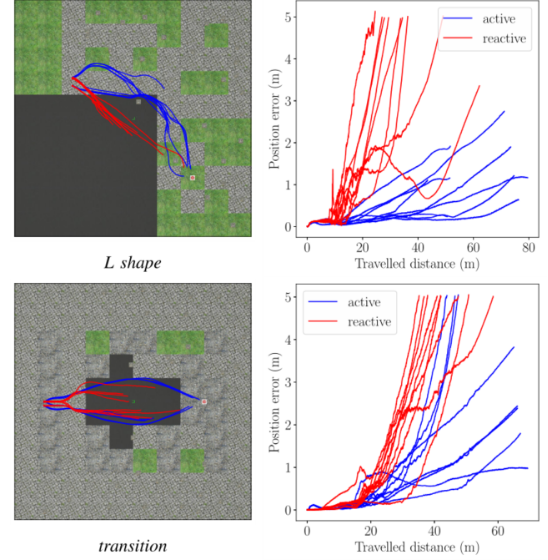
作者使用Rotors模拟器搭建了仿真环境,在每个场景中,从稍微不同的起始位置启动四旋翼机,并命令它飞到指定的目的地10次,在每次运行中,一旦状态估计偏离地面真相超过5米,就终止执行并报告试验失败,一旦状态估计到给定目的地的距离小于3米,就报告试验成功。地图如下图所示:
下面这些图为实验结果,展示了所提出方法的优势:
- 第一个场景L形状由纹理强的区域(草和石头)和纹理较弱的区域(左下角的黑色区域)组成。可以观察到,纯反应式导航方法指令四旋翼机直接飞向目标,但轨迹经过视觉退化部分,导致状态估计误差较大。相比之下,文中的方法避免了四转子进入纹理较少的区域,并且能够保持合理的状态估计。
- 第二个场景转换在中间包含一个视觉退化区域,该区域位于起点和终点之间。虽然文中的方法能够使无人机走了更远的路才到达目的地,但反应式导航无法成功完成任务。
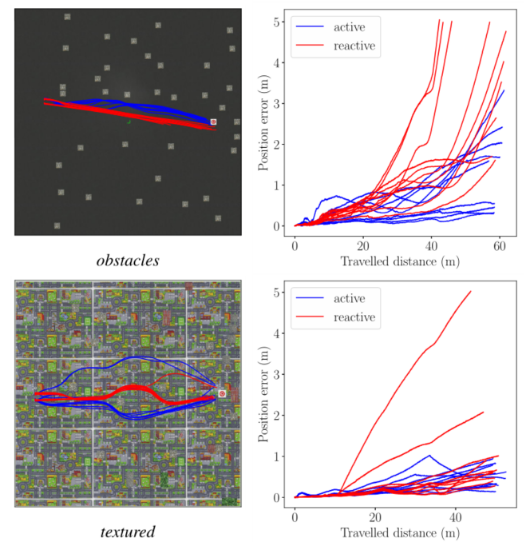
- 在第三场景障碍物中,地面几乎没有纹理,大部分视觉信息来自障碍物。在这个场景中,文中的方法和反应式导航的轨迹与前两个场景差别不大,但是文中的方法的状态估计误差仍然明显较小
- 第四个场景纹理完全,没有明显的视觉退化部分。反应式导航和文中的方法在这个场景中都表现得很好,文中的方法也有更好的性能。
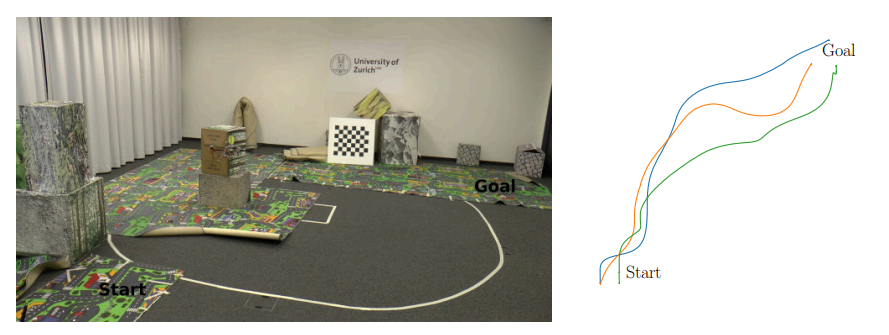
5.2 真实世界的实验
下图显示了真实世界实验环境和实验结果,从实验结果可以看出,无人机并没有直线的前往目标,而是选择了一条距离稍长但纹理信息更丰富的路线。
6 总结
这篇文章出自苏黎世大学,我认为这篇文章的内容、配图以及公式推导都非常清晰明了,当时我读这篇文章的时候还是刚接触SLAM不就,但是看这篇文章也不会觉得困惑与无聊;作者提出的无人机ActiveSLAM解决方案也十分创新高效,通过文中的实验结果,可以清晰地看出他们所提出方法的优势!推荐大家阅读!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









