






目录
前言
现在大三暑假,开学就要着手准备毕设了,接手了实验室师兄的激光SLAM小车项目,先从下位机学起,争取把整个项目接受下来,有所收获有所创新。
这篇是在学习代码过程中,对四轮差速小车、麦克纳姆轮小车以及两轮差速小车运动学模型的学习总结。
一、四轮差速运动模型
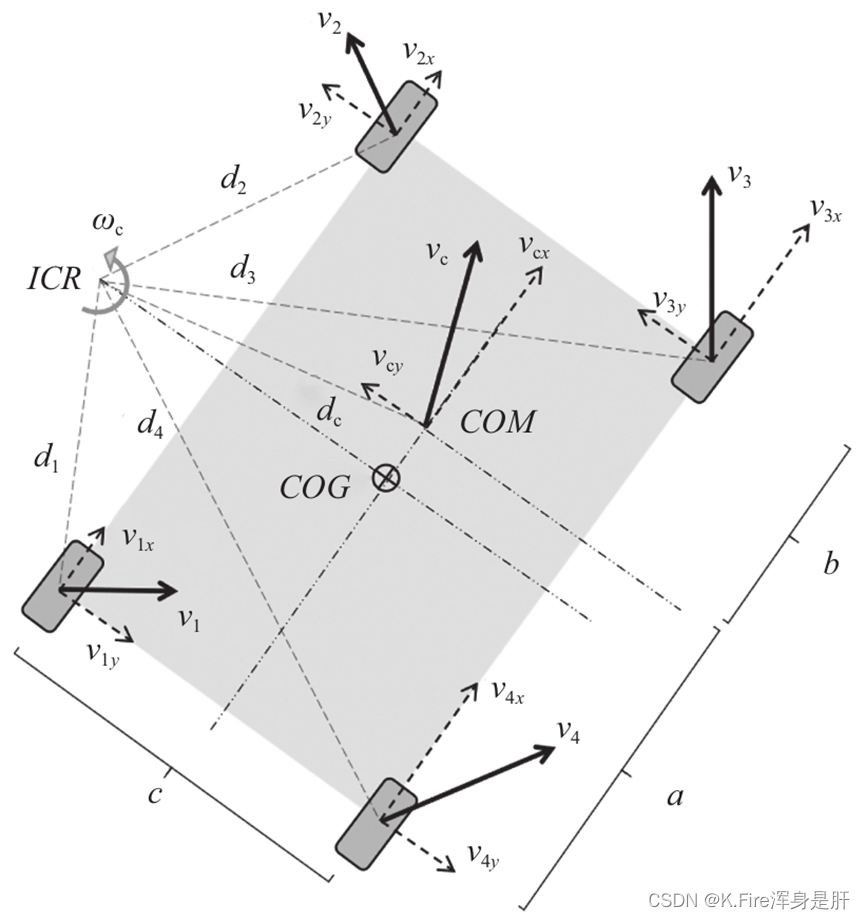
符号说明:
在四轮差速模型中,前轮和后轮的速度是同步的,这里以底盘几何中心COG沿y轴方向上的点ICR作为整个底盘进行圆周运动时的圆心,ICR和COG的距离大小与圆周运动角速度大小有关。
公式推导:
绕圆心做圆周运动的物体,其线速度v、角速度w和圆周半径d满足w=v/d。因此可以建立底盘中的约束关系:
假设线与y轴的夹角为,可以对上式进行变形,结果如下所示:
刚体旋转时,各个位置的角速度与质心处的角速度是一样的,即四个轮子绕ICR旋转的角速度也是。按照上式推理,同样可以得到以下约束关系式:
同时,与
在x轴和y轴上的投影长度满足下式关系:
当四轮差速底盘设定的左轮、游轮速度分别为和
,且前轮、后轮速度严格同步时,有下式所示关系:
综合上式可以得到以下结果:
将上式整理后,得到四轮差速底盘的前向运动学关系:
参考博客:移动机器人运动模型(两轮、四轮、麦克纳姆轮和概率运动)_anthony-36的博客-CSDN博客_移动机器人运动模型
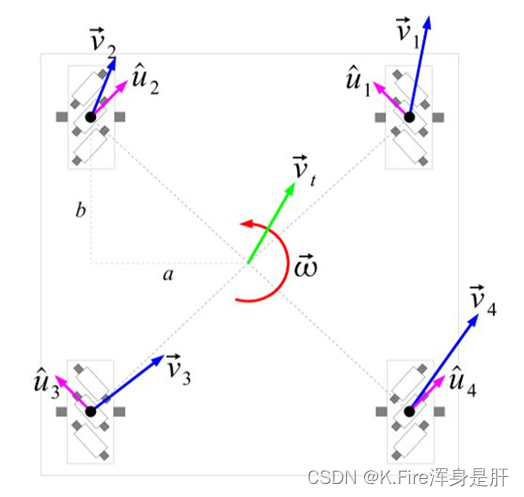
二、麦克纳姆轮运动学模型
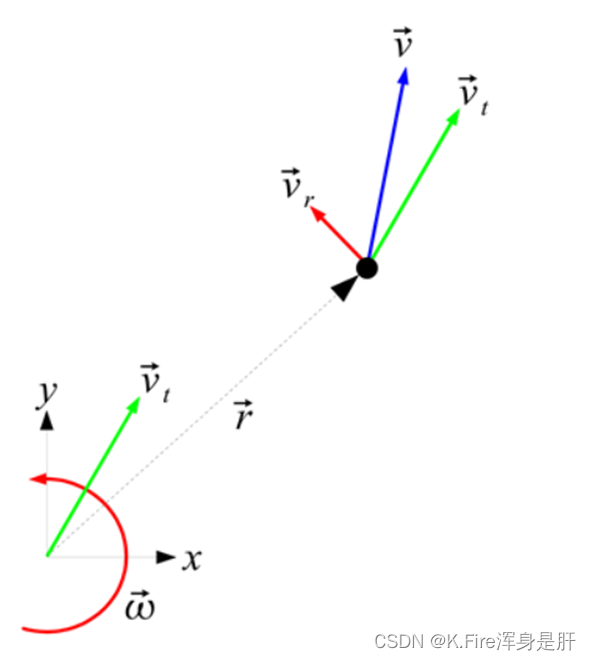
已知车中心的xy方向线速度、
和角速度
,可以计算出每个轮子的中心速度:
那么轮子中心的xy方向速度分量为:
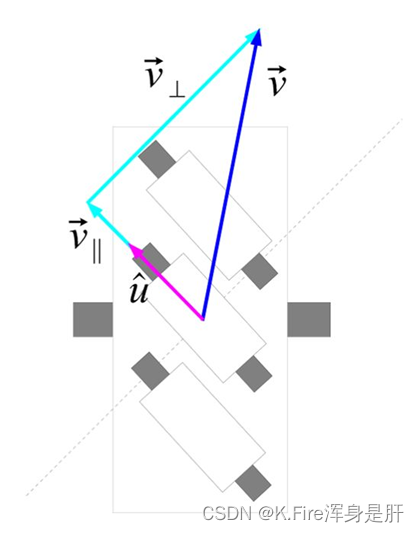
根据轮子中心的速度,可以分解为沿辊子方向速度和垂直辊子方向速度,垂直辊子方向速度可以不记,是沿辊子方向的单位向量(投影),可以得到:
辊子方向与x轴方向夹角为45°,则单位向量可以表示为:
则有:
化简后得到:
然后从与地面接触的辊子速度到轮子线转速:
代入上述、
计算公式得:
依次可得四个轮子的计算公式:
式中、
是车身横向距离和纵向距离的一半
参考博客:一文读懂麦克纳姆轮全向移动原理及剖析_苏守坤的博客-CSDN博客_麦克纳姆轮原理
在小车横向距离和纵向距离相近时,麦轮的运动学模型会退化成四轮差速小车的运动学模型,y方向的速度为0,、
相等,看一下公式就推出来了。
三、两轮差速运动学模型
运动特性为两轮差速驱动,其底部后方两个同构驱动轮的转动为其提供动力,前方的随动轮起支撑作用并不推动其运动,两轮差速驱动如下图所示。
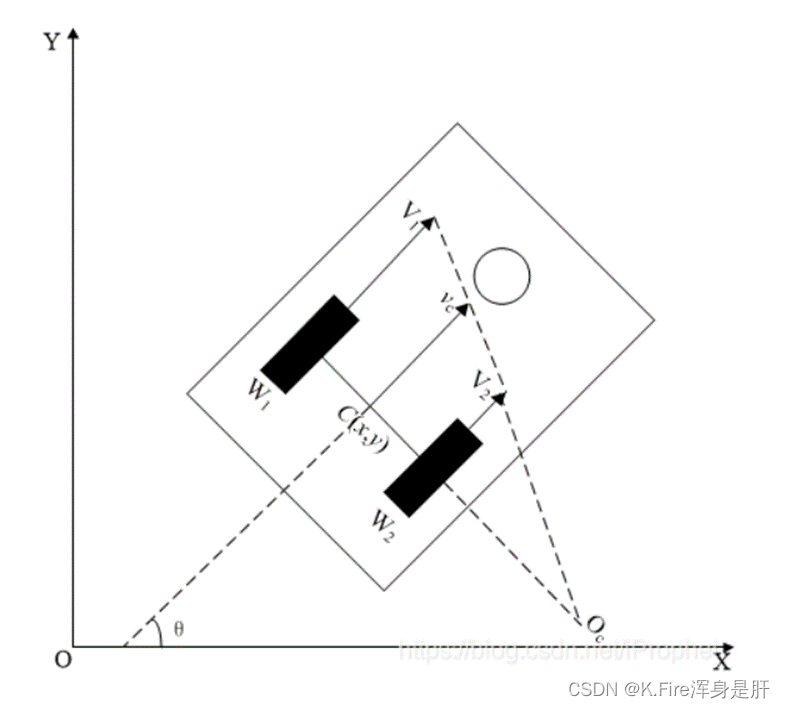
它的解算是要达到下图所示目的:
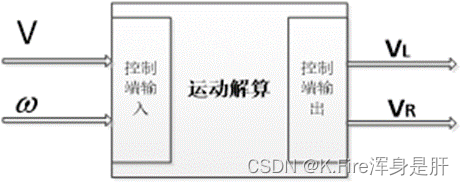
给定前进速度和角速度,计算出左右轮的速度。
根据高中所学的线速度角速度公式,可得:
参考博客:两轮差速机器人运动学模型_奔驰的战猪的博客-CSDN博客_两轮差速模型
总结
感谢CSDN各位大佬,让菜鸡又学到了知识

















 5246
5246

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









