






应用:获取机器人当前位置写到触摸屏、IOT平台等,做数据展示。
功能介绍:将机器人当前垂直相交位置(基座坐标值)输出到指定的缓存中。
方法一:机器人当前垂直相交位置
[单位:mm]、[单位:deg]
1、翻页找到设置,参数-S1CxG
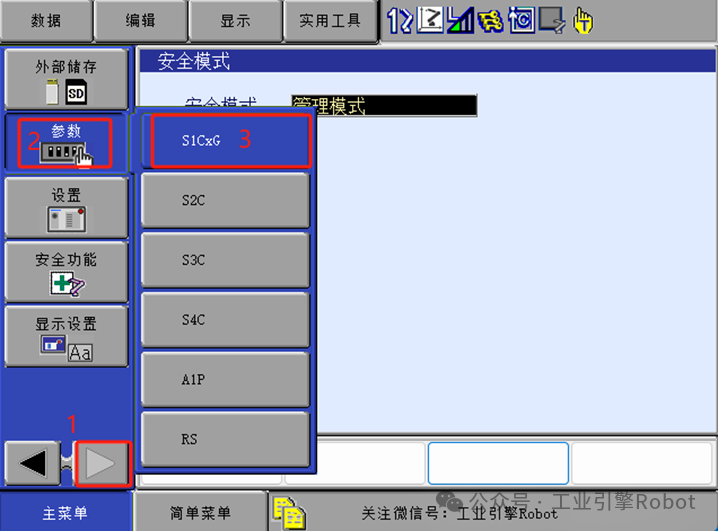
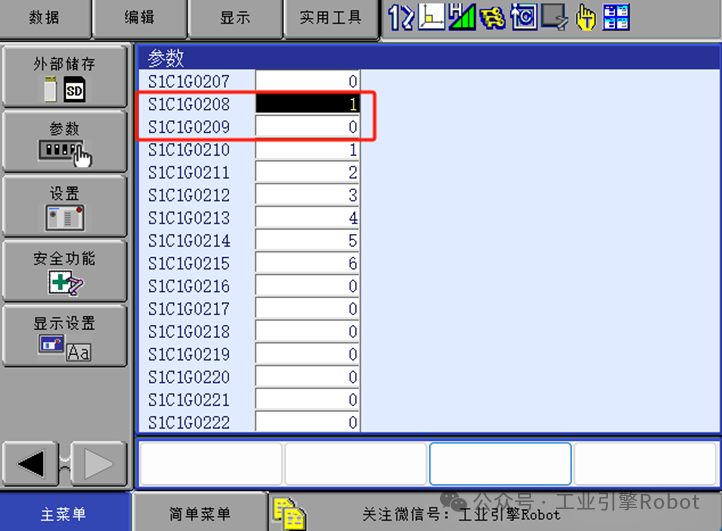
2、开通功能参数
设置参数S1C1G208=1,当前垂直相交位置(基座坐标值)指令值缓存输出功能有效。
S1C1G209=0,缓存输出大小指定 0:双字节输出
3、设置写入寄存器参数
设置如下参数
S1C1G210垂直相交位置(指令值)X输出对象缓存编号
S1C1G211垂直相交位置(指令值)Y输出对象缓存编号
S1C1G212垂直相交位置(指令值)Z输出对象缓存编号
S1C1G213垂直相交位置(指令值)Rx输出对象缓存编号
S1C1G214垂直相交位置(指令值)Ry输出对象缓存编号
S1C1G215垂直相交位置(指令值)Rz输出对象缓存编号
S1C1G 216垂直相交位置(指令值)Re(外部轴)输出对象缓存编号
如图:将当前位置分别写入寄存器M1-M6
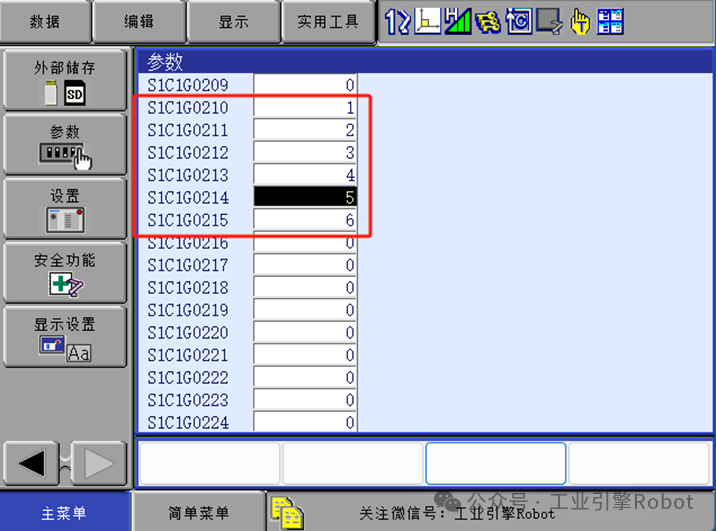
注意:指令值缓存输出功能设为有效(S1CxG208=1)时,必须设定各坐标值输出缓存编号(S1CxG210~216)。
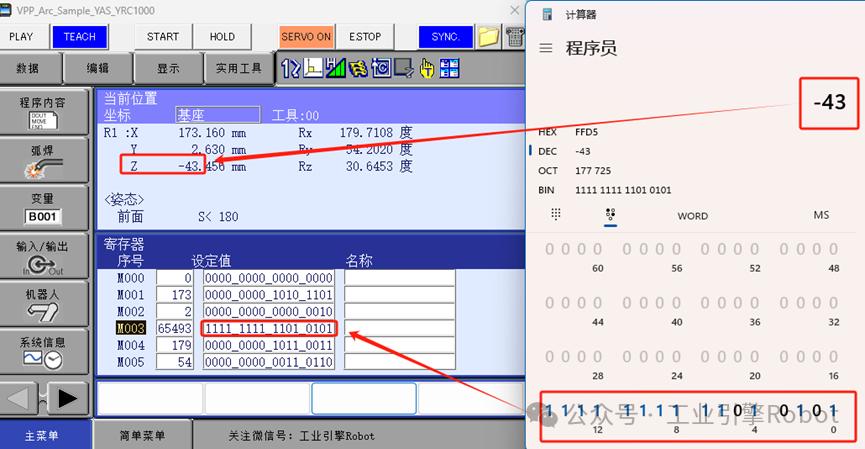
4、效果展示
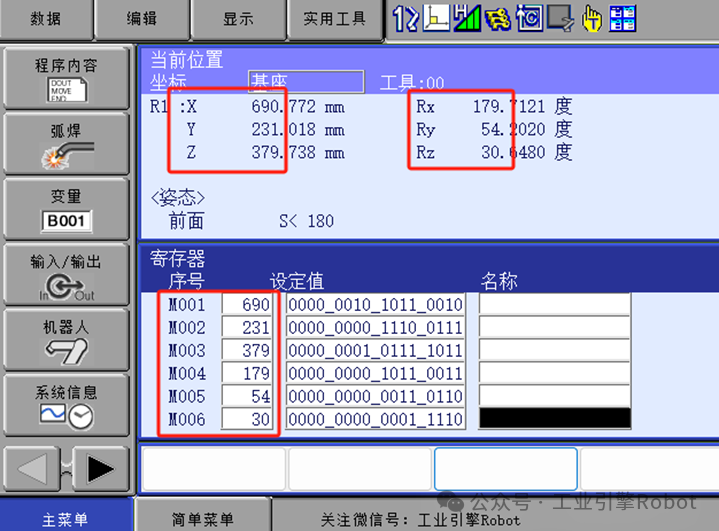
注意:数据为负时,需要进行转换,转换方式如图。
方法二:缓存输出大小指定 0:双字节输出 1:4字节输出
[单位:μm][单位:0.0001deg]
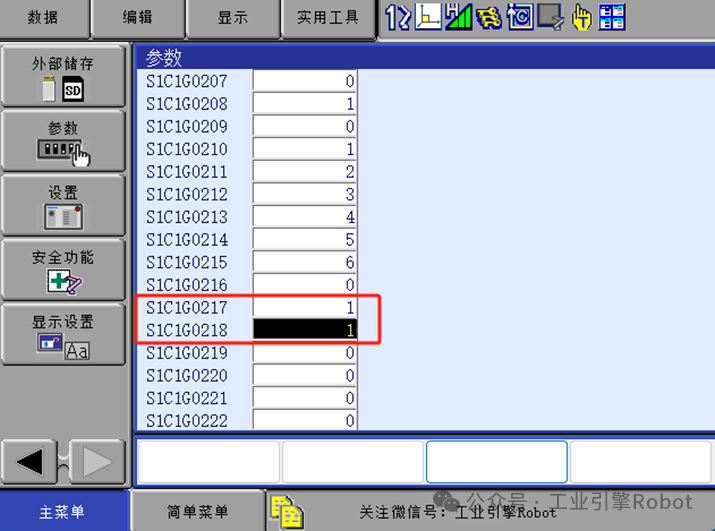
1、开通功能参数
S1C1G217=1当前垂直相交位置(基座坐标值)FB值缓存输出功能有效 。
S1C1G218=1缓存输出大小指定4字节输出。
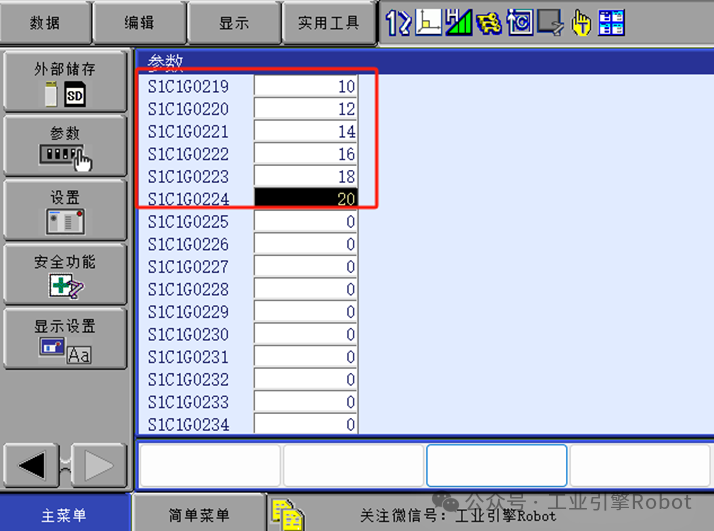
2、设置写入寄存器参数
设置如下参数
S1C1G219垂直相交位置(FB値)X输出对象缓存编号
S1C1G 220垂直相交位置(FB値)Y输出对象缓存编号
S1C1G 221垂直相交位置(FB値)Z输出对象缓存编号
S1C1G 222垂直相交位置(FB値)Rx输出对象缓存编号
S1C1G 223垂直相交位置(FB値)Ry输出对象缓存编号
S1C1G 224垂直相交位置(FB値)Rz输出对象缓存编号
S1C1G 225垂直相交位置(FB値)Re(外部轴)输出对象缓存编号
如图:将当前位置分别写入寄存器M10-M20
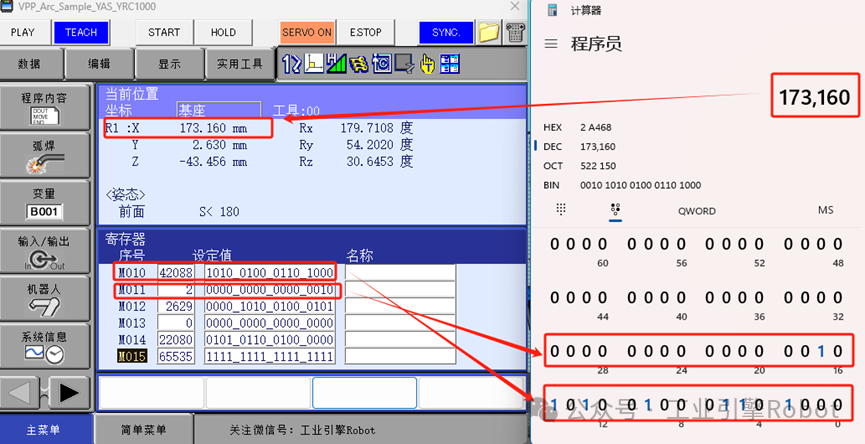
3、效果展示
需要进行单位转换,转换关系如图
最后
多多关注、转发、点赞支持。
有想学习安川机器人内容,可在下方留言!

















 7132
7132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









