






MDC610
使用华为MDC610来完成智能驾驶相关任务,激光雷达使用速腾M1。
使用环境为Ubuntu20.04。
文章目录
前言
文章主要记录MDC610相关开启、关闭等代码实现,遇到的问题以及解决办法
一、各类传感器
需要进入MDC610平台下(账号、密码)
ssh root@192.168.30.42
1.激光雷达
1.0 硬件连接
MDC端接口:B2(右数第一个
MTB端接口:6(B2) (底下右侧数第二个
注意ID0短接
为什么要短接呢?
因为接口速率配置方式,选择模式2,端口速率模式为10,1000M接口3~8,100M接口1、2(对应图1上的),连接MTB 310的16Pin低速线缆,并将16Pin低速线缆上的ID1悬空,ID0接口连接短接线缆。
1.1 配置
1、使用little robo工具配置速腾激光雷达M1,IP地址为192.168.1.201,目标地址为239.25.0.1(组播地址),MSOP为2368。
2、使用的网口为B2,修改网络配置。

MDC610产品文档>平台调测指南>配置网络通路>概述>自定义网络配置。
配置usr_network_port.json文件中的B2端口。
3、默认B2端口为100M;配置B2网口为1000M
cd /opt/platform/mdc_platform/script
python3 ./net_config_tool.py -M master_slave_set -m master -p 6
python3 ./net_config_tool.py -M bandwidth_set -b 1000M -p 6
4、启动脚本。
/opt/platform/mdc_platform/script/lidar_a_m1_start.sh
5、查询激光雷达抽象服务
rtfevent list | grep -i Lidar
rtfevent hz /HuaweiMDC/PlatformServiceInterface/LidarServiceInterface/LidarServiceInterface/mdcEvent[/HuaweiMDC/PlatformApplication/LidarCmCenterApplication/Service/DP/Provider/LidarCmToAppProvidedDdsServiceInstanceFront]#查询event频率信息
tcpdump -i eth0.15 -v -nn#查询端口eth0.15是否收到激光雷达的原始数据
1.2 激光雷达可视化
/opt/platform/mdc_platform/script/lidar_mviz_start.sh
2.摄像头开启
2.0 摄像头抽象自启动,无须手动开启
2.1 查询频率
rtfevent hz []
前视相机instance id = 23
2.2 相机可视化
bash /opt/platform/mdc_platform/scripts/camera_mviz_start.sh 73
3.毫米波开启
3.0 目前为RADAR_C5,模式为Detect
3.1 开启毫米波抽象
bash /opt/platform/mdc_platform/scripts/radar_a_ars400_start.sh
3.2 查看event
rtfevent list | grep -i Radar
3.3 可视化激光雷达
bash /opt/platform/mdc_platform/scripts/rador_mviz_start.sh
二、遇到的问题以及解决办法
1.由于运行脚本时出现如下错误,需要每次运行前在mdc平台中配置第三方库
错误

解决办法——配置第三方库
tar -xf MDC_AOS_rpmlist-1.1.027-0000000T1-llvm-prod.tar.gz
tar -xf MDC_AOS_rpmlist-1.1.027-0000000T1-llvm-dev.tar.gz
cd /opt/usr/mdc_repo/gea_scripts/
source ./rpm_install.sh
2.相机目标检测问题
使用ADSFI_Sample中未经过修改的camera_det模块进行相机目标检测测试,模型为自带的yolov3.om和yolov3_hps.om,代码中的ImageType为“HAF_IMAGE_YUV420SP_NV12_UINT8”,与所用相机发布格式相对应。
此时camera_det无法正常运行,出现如下报错,即无法正确将图片拷贝至DVPP内存:
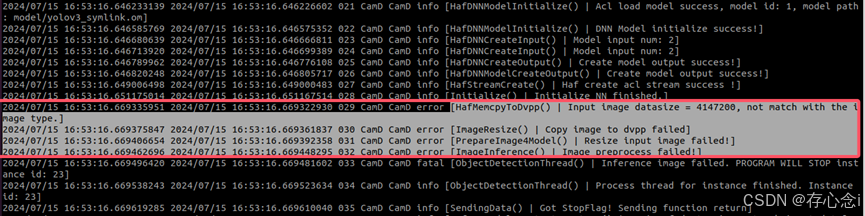
将代码中的ImageType改为“HAF_IMAGE_YUV422SP_UINT8”后camera_det可正常运行,但没有检测结果输出,显示detected box num为0,此时相机画面中有明显可识别障碍物。
等待更新
三、一些知识
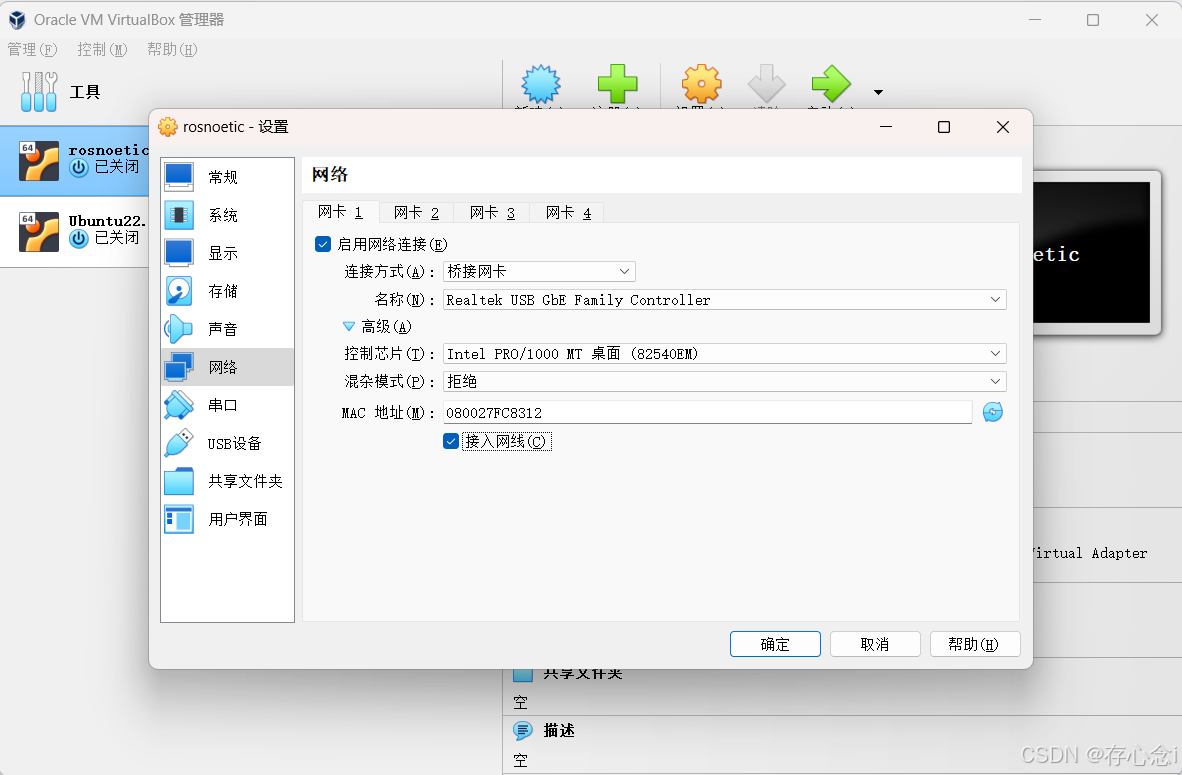
1.在virtualBox上连接MDC(电脑没有网口,使用网口转USB线)
a、将网线、网口转USB与电脑连接;
b、在网络适配器中找到该网口;
c、在设置中选择为桥接模式,并选择该网络适配器型号;
d、在ubuntu中将有线连接设置为与MDC同网段的ip下


调成有网状态:


2.实现代码检测框在mviz中的可视化
main函数中写:
mdc::visual::Connect();
main头文件中包含:
#include <publisher.h>
需要可视化的cpp中:
头文件中包含:
#include <publisher.h>
mdc::visual::Publisher objectArrayPub {};
函数中写:
mdc::visual::ObjectArray objectArray = {};
objectArray.header =mdc::visual::Header(); objectArray.header.frameId = img2->frameID;
objectArray.header.stamp.sec = img2->timestamp.sec;
objectArray.header.stamp.nsec = img2->timestamp.nsec;
最后写:
objectArrayPub.Publish(objectArray);
总结
文章还在持续记录中,还未完结…

















 4224
4224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









