







1.李群和李代数
1.R和ϕ的关系
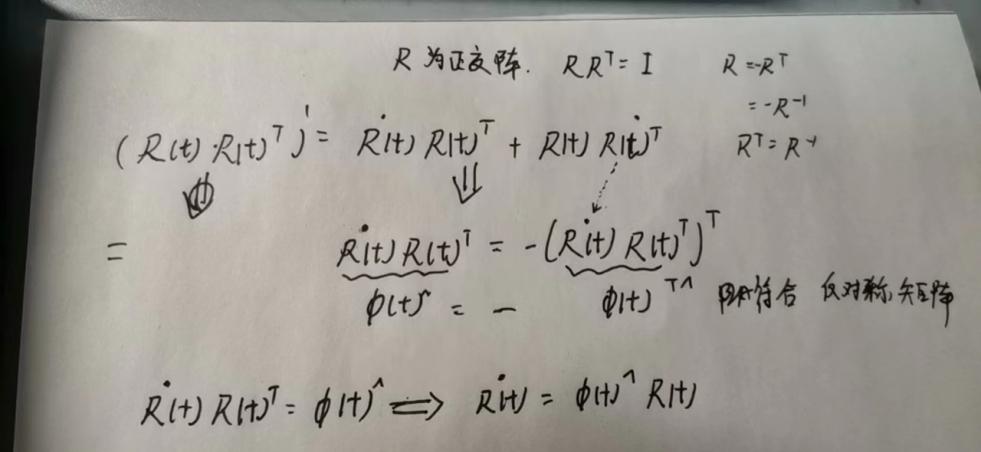
R是随着时间t变化的且R * RT = I,因此对时间t求导,得到反对称矩阵。因此根据反对称矩阵找到一个对应R的向量
李代数的引出是根据旋转对时间求导,根据R矩阵的正交性会得到一个反对称矩阵。根据之前的知识我们知道反对称矩阵可以用 一个向量加上反对称符合表示 这样就把三维空间R和二维向量Φ联系起来。同时我们会知道 二维的是三维的一个映射 ,映射关系服从指数映射
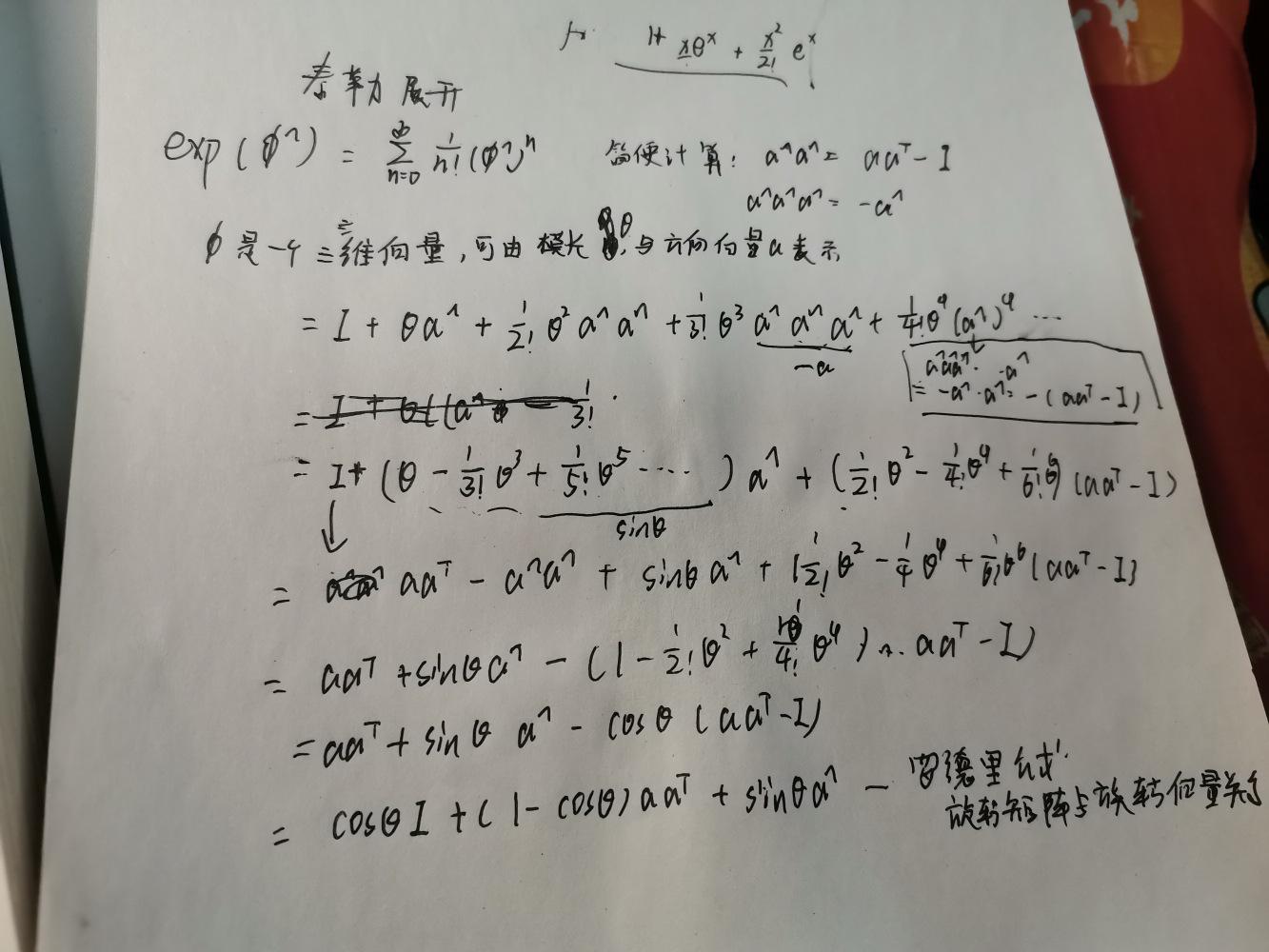
我们上面知道了 如何从一个Φ 推导出R 符合罗德里公式 ,因次Φ = Θα 也可以根据迹的公式和关系 分解得到两个变量
同时我们把R(t)利用导数定义展开的时候可以得到定义式:
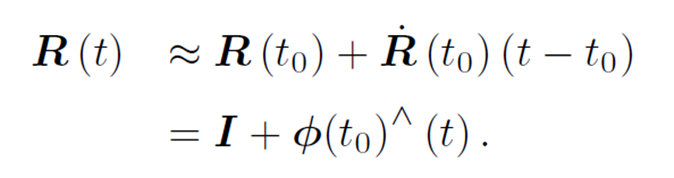
在t0附近,

利用微分方程求解
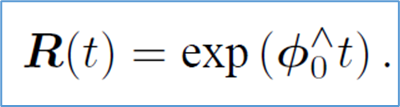
总结:ϕ描述的是R在某个局部的导数关系, 这就是指数对数的映射关系。
2.指数映射
3.扰动模型
1.
在SLAM问题中,待求解的变量都是位姿(较上个状态的旋转,平移),而一般采取优化的方法来求出待解变量。而优化的问题中,导数是非常重要的消息。https://zhuanlan.zhihu.com/p/504777287
因此在按照一般的导数定义求导的时候,预求f(x)在某点x0的导数,需要给x0增加一个微小量 Δx 。按照这想法,把微小量 当作一个微小的旋转量,左乘或者右乘到f(x)上,这也也可以得到导数,这也的思想是扰动模型。
而如何处理两个exp(ϕ^)【也就是R】相乘的时候的计算问题,这就是BCH公式 :说明了R左乘或者右乘微小旋转后李代数上的表达。同时李群上不能相加,李代数上能相加,在李代数上相加也可以转换为李群上对R的左乘或者右乘的形式。
2.
矩阵的指数运算并不满足标量的运算公式,满足是BCH公式
R矩阵的乘法 在指数运算上可以符合一些向量的运算公式
引出 我们一般需要对T进行求导,而李群不满足 加法 李代数满足加法
因此有两种想法 利用李代数 加一个微小变量,进行导数定义
另一个就是左乘微小扰动 (相当于李代数加法) 对扰动求导
在本章之后构造的误差函数,对自变量是不方便直接求导的,因此对自变量进行小量扰动,然后求出对小量的偏导,令其为0,得到小量,再把自变量加上小量,进行更新,进行下一轮的迭代。
3
另一种思想,高博ppt上说的
由于R没有加法,导数无从定义
存在两种解决办法:
对 R 对应的李代数加上小量,求相对于小量的变化率(导数模型);
对 R 左乘或右乘一个小量,求相对于小量的李代数的变化率(扰动模型)。
总结,微小扰动求导是一种方法,因为可能想的是其实对R*ΔR就相当于再exp(ϕ^ + Jr^-1(ϕ^)*ϕ2^)可以把右侧的当作一个小量t 其实和导数定义差不多的意思。















 3040
3040











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









