







前言:ROS2已经出来了,ROS1会被逐渐淘汰,大家尽量不要学ROS1了!!
一、运行helloworld
1.创建工作空间
在ROS上编写程序都需要工作空间,所以一般我们都需要创建工作空间:

mkdir -p ws00_helloworld/src
cd ws00_helloworld
colcon build
上述指令执行完毕,将创建ws00_helloworld目录,且该目录下包含build、install、log、src共四个子级目录。
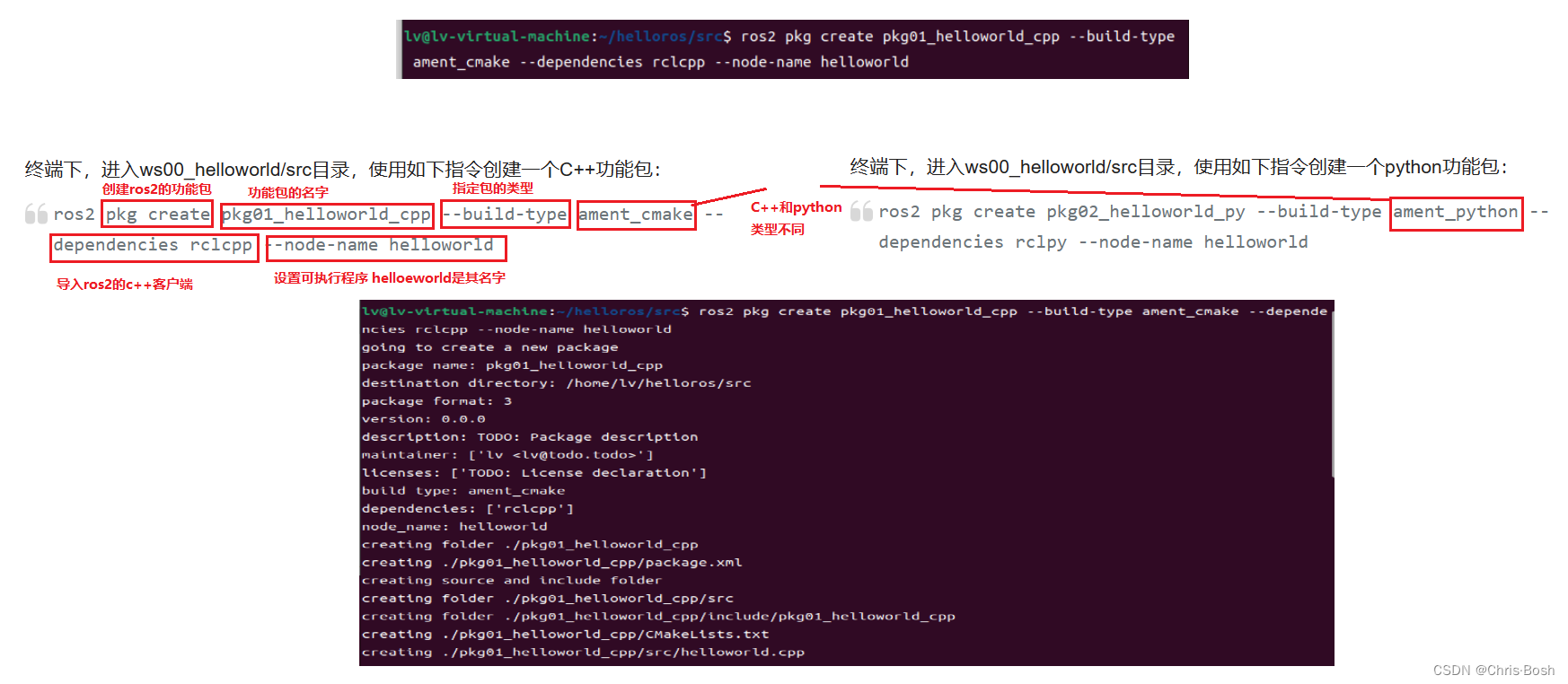
2.创建功能包
创建功能包必须在工作空间下的src目录!
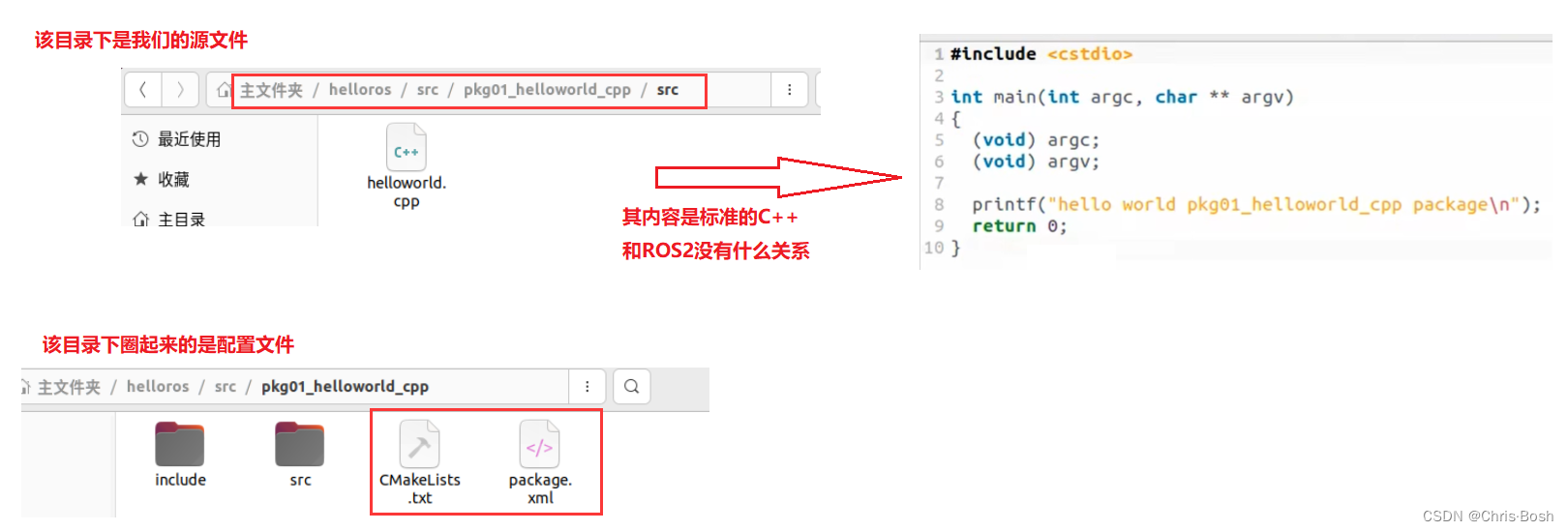
3.源文件和配置文件
4.编译与运行
编译时必须要在我们的工作空间,不能再src下编译!

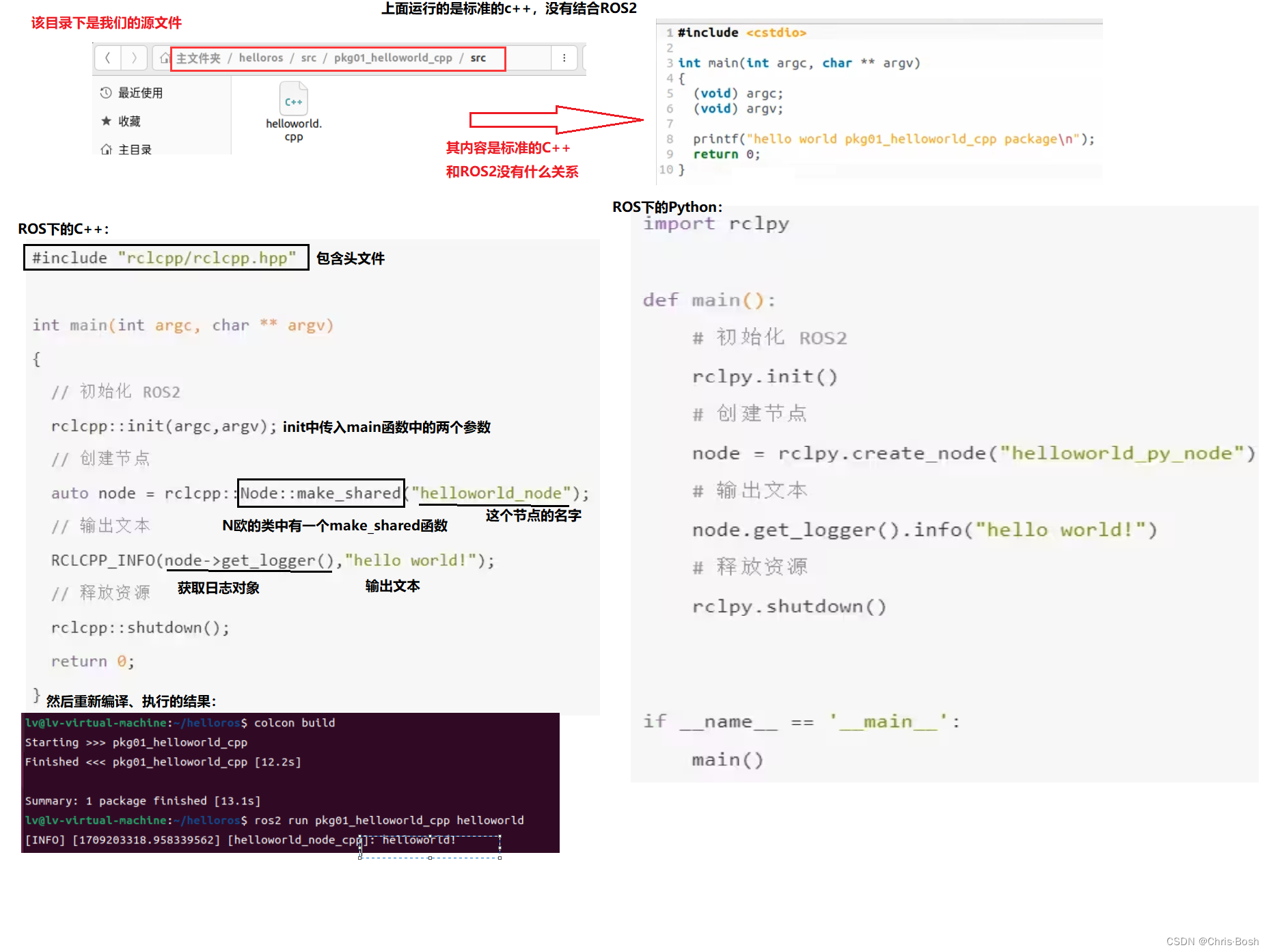
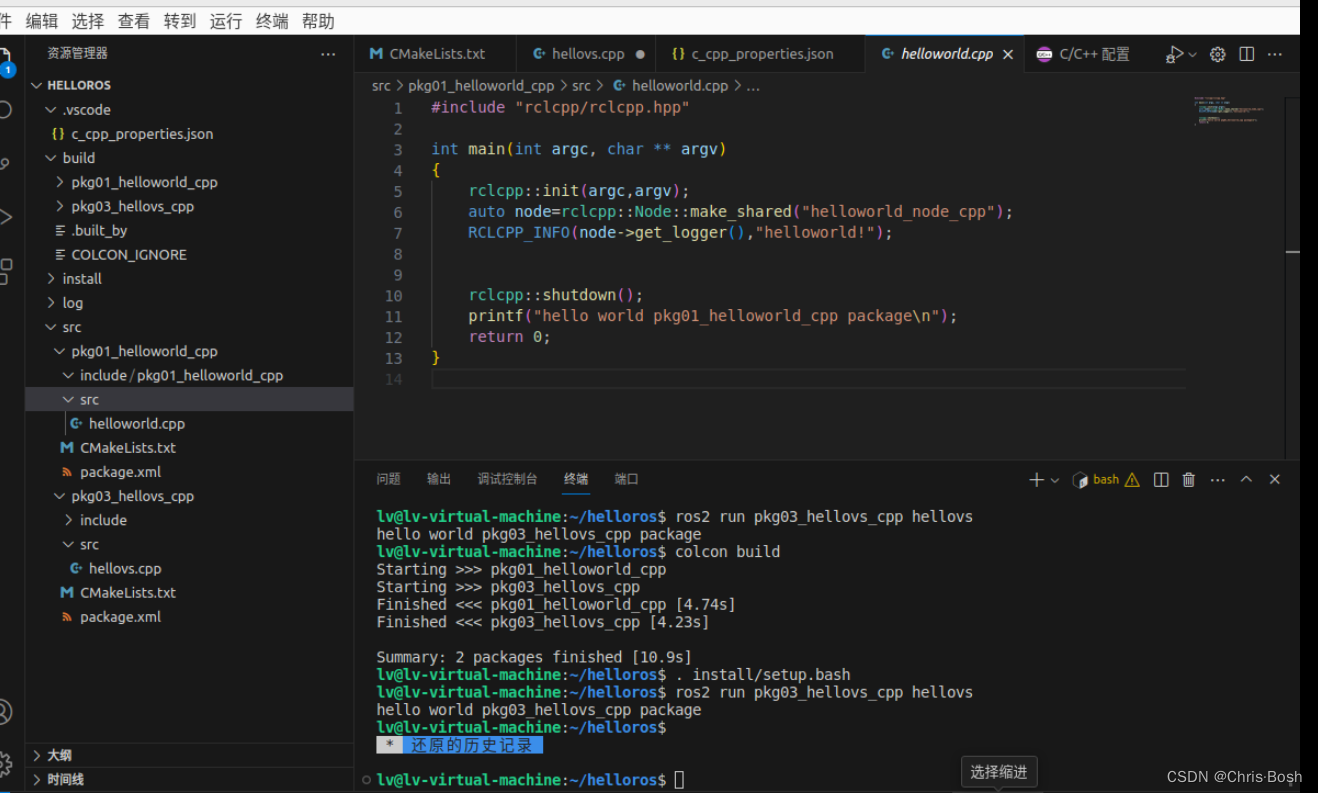
5.源码编写下的编译与运行
Python的结果大家可以下去自己试一下!
注意Python前面功能包是pkg02
6.运行优化
每次终端中执行工作空间下的节点时,都需要调用. install/setup.bash指令或者source install/setup.bash指令,使用不便,优化策略是,可以将该指令的调用添加进~/setup.bash

这样不在工作空间下,哪怕新建一个终端我们也可以直接运行了!!!!
其也就是在隐藏文件.bashrc中添加了环境变量!!
二、集成开发环境的搭建
最常用的就是VS code了
vscode官网:https://code.visualstudio.com/Download
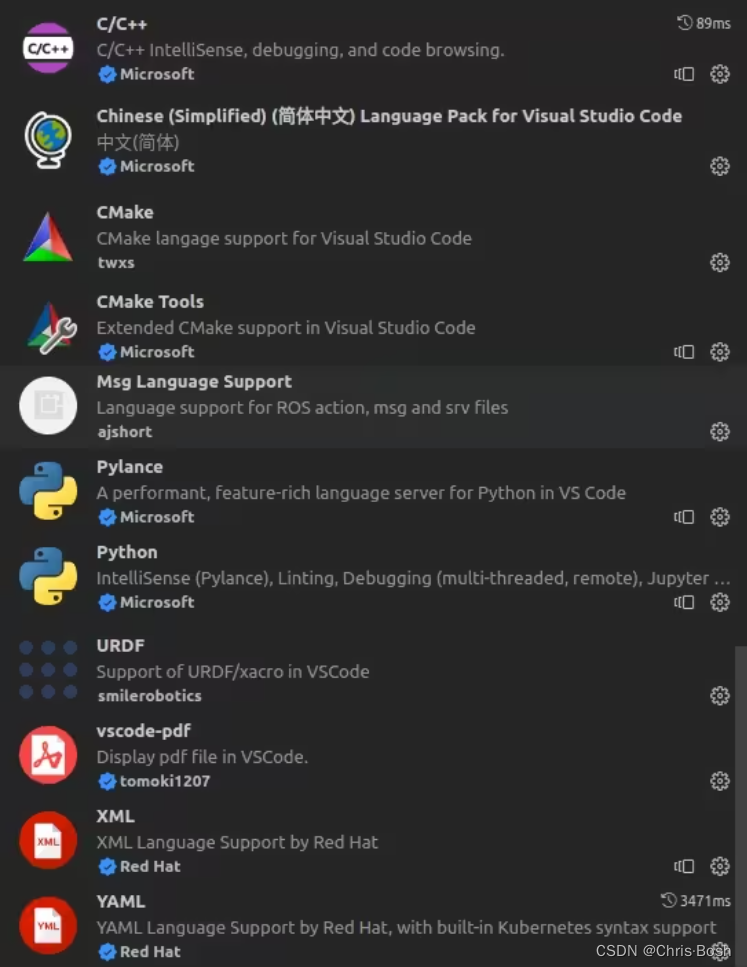
下载好后推荐一些插件:
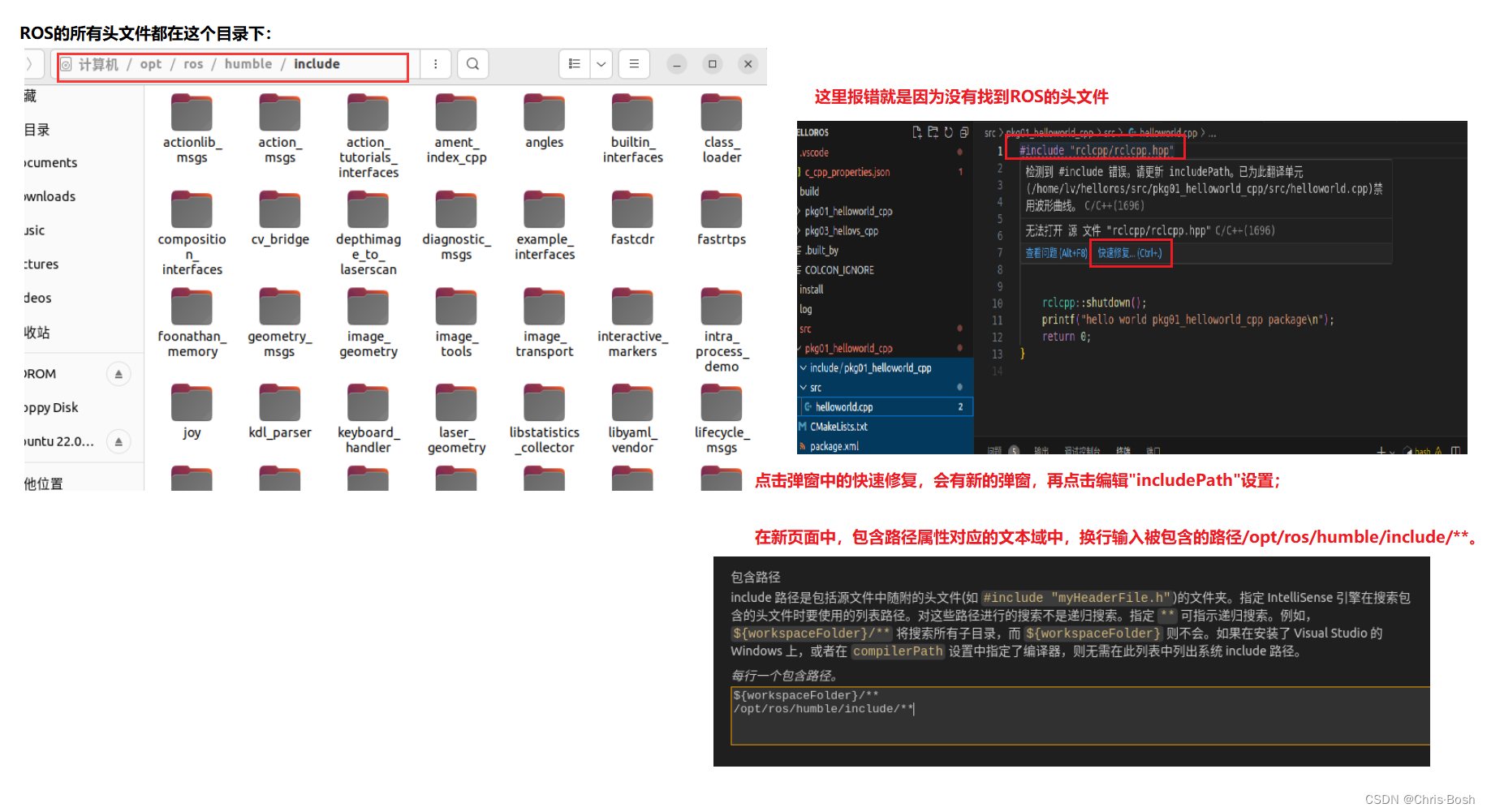
关于VS code无法识别一些头文件的解决:
然后就可以在VS code上进行编写程序了
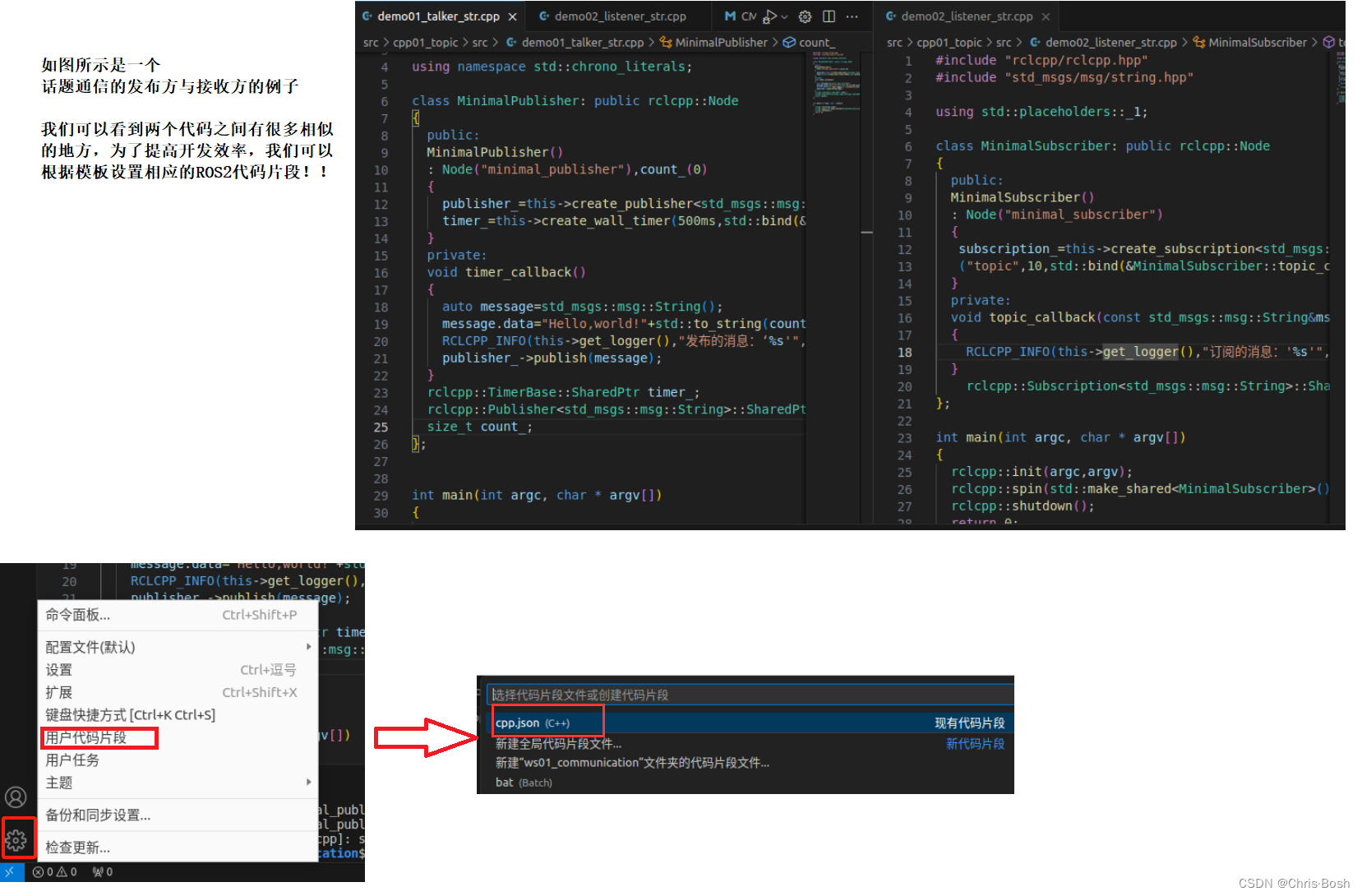
三、集成开发环境的ROS2模板设置
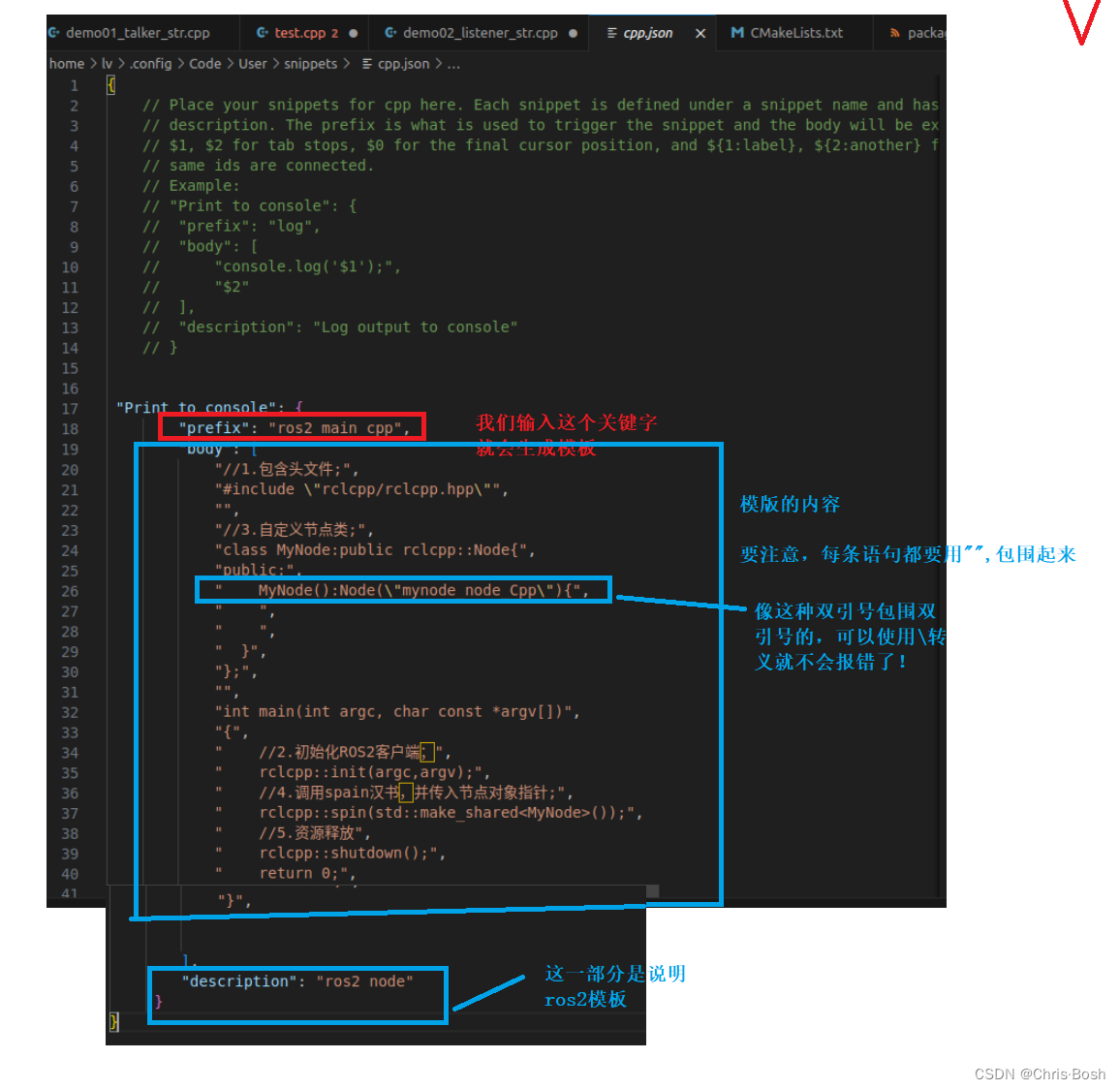
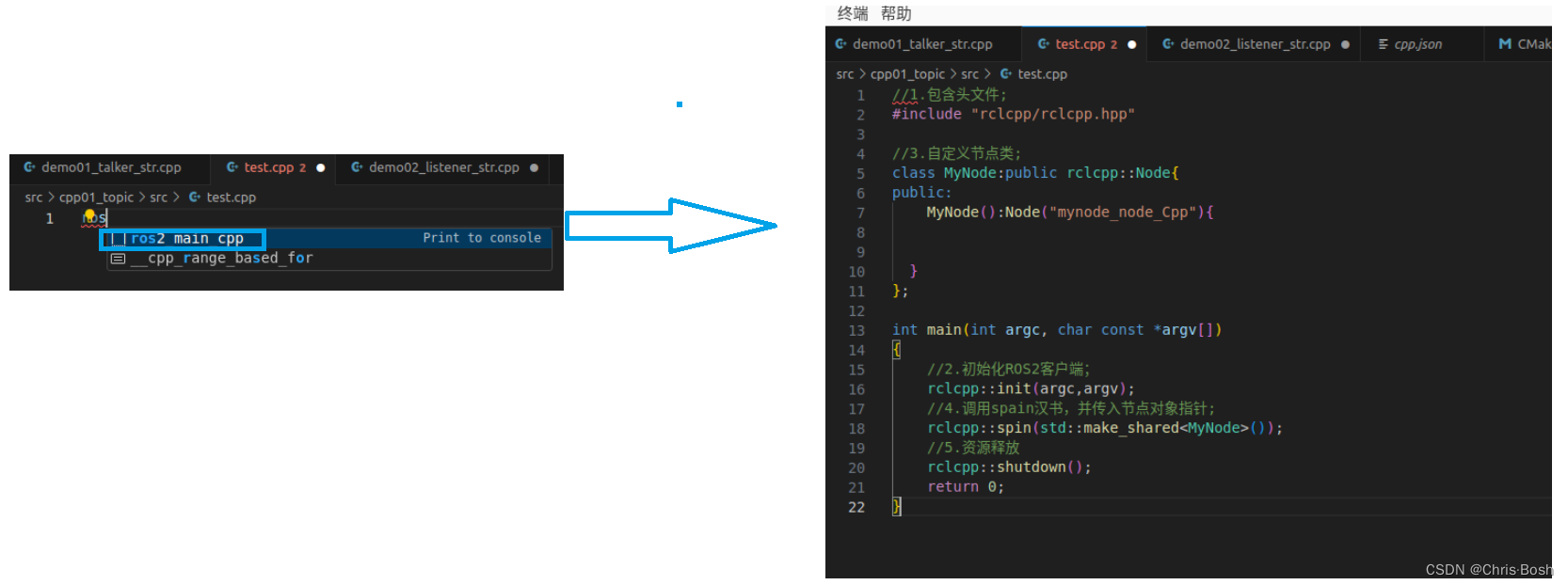
这样我们的ROS2模板就建立好了!
















 435
435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











