







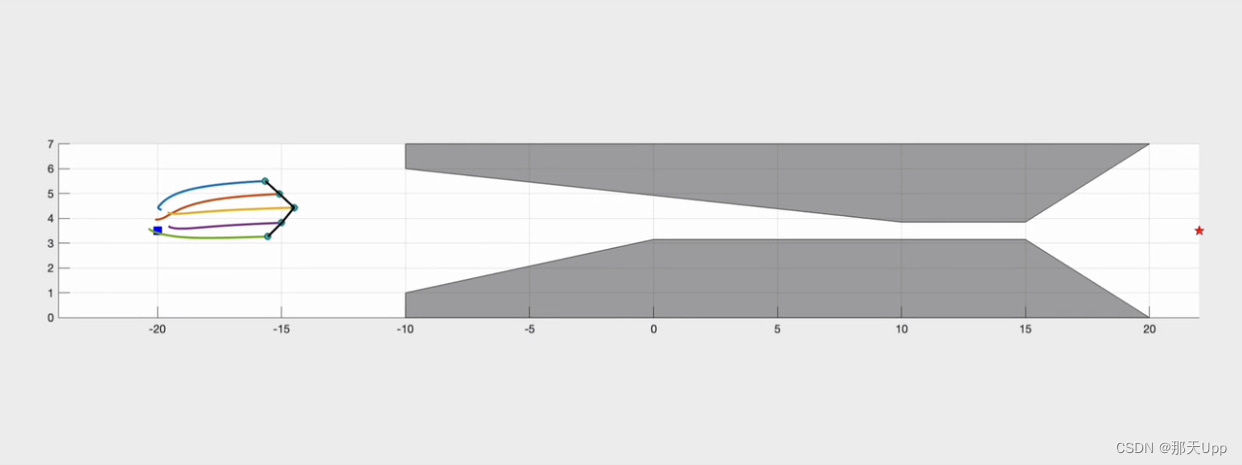
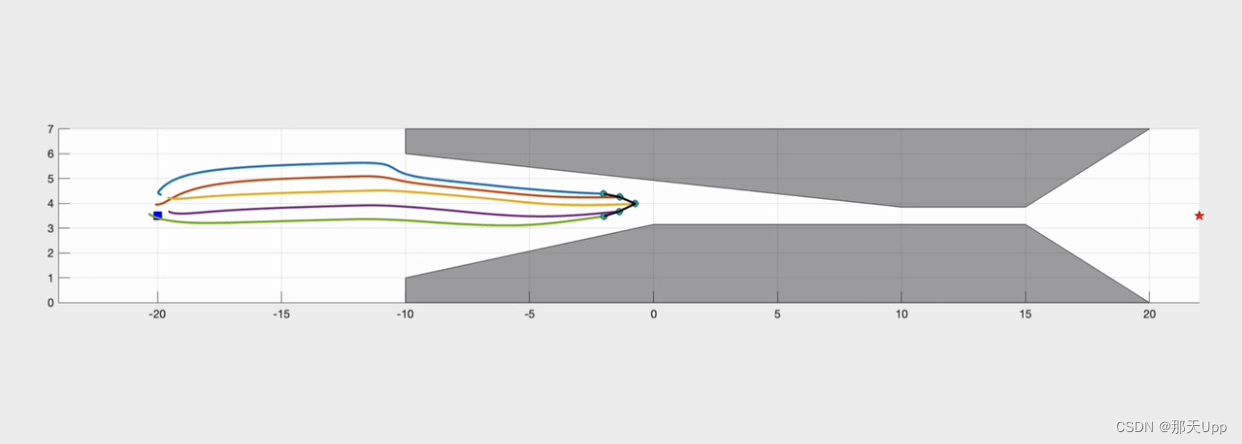
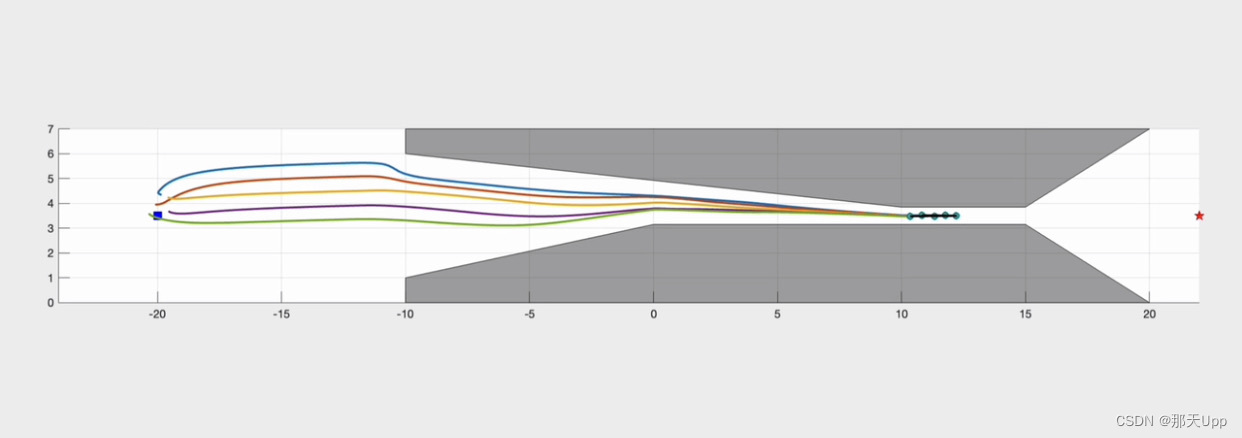
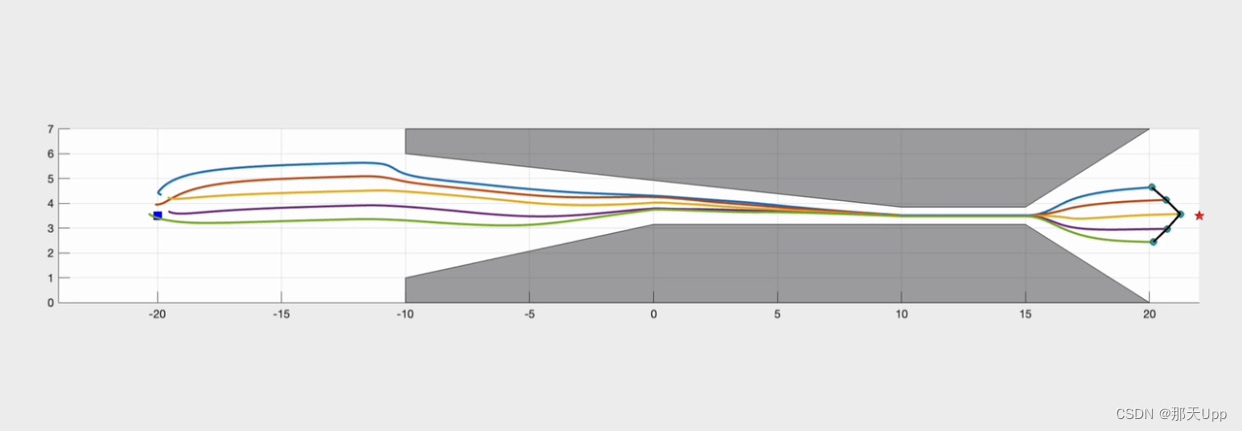
编队路径规划 基于分布式控制策略 编队+避障+避碰+自重构 多机器人 自重构 UAV 编队 可以和RRT融合 融合算法 改进路径规划 动态路径规划
编队路径规划 基于分布式控制策略 编队+避障+避碰+自重构 多机器人 自重构 UAV 编队 可以和RRT融合 融合算法 改进路径规划 动态路径规划











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 3442
3442





