






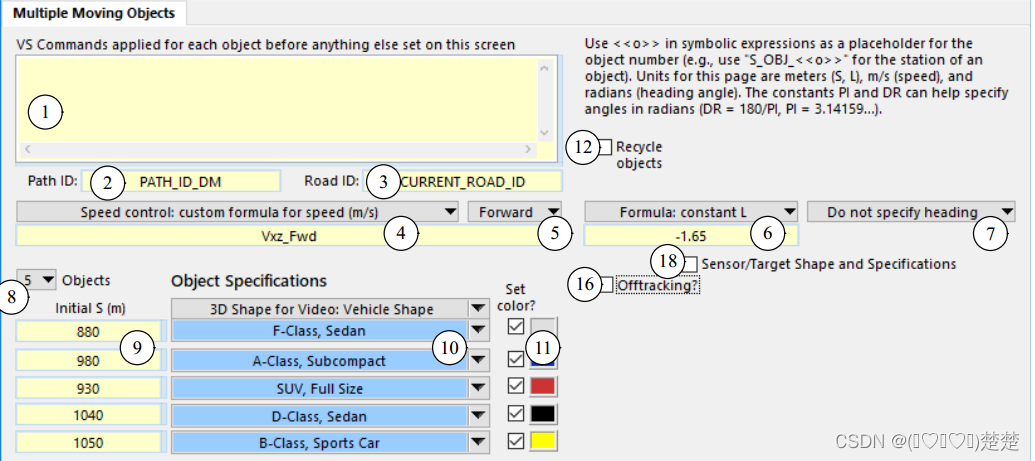
 圈1:此杂项字段供高级用户应用 VS 命令。与屏幕顶部的其他控件一样,此字段的内容会针对使用数据集创建的每个移动对象写入一次。
圈1:此杂项字段供高级用户应用 VS 命令。与屏幕顶部的其他控件一样,此字段的内容会针对使用数据集创建的每个移动对象写入一次。
圈2:用于定位此屏幕上定义的对象的参考路径的路径 ID(关键字 = PATH_ID_OBJ)。
当指定路径 ID 时,可以通过为每个对象设置三个变量的值来控制每个对象的位置和方向:相对于目标路径的站点(S_Obj_o,其中 o 是对象编号)、横向坐标(LatO_o)和航向角(HeadO_o)。
控制物体运动的另一种方法是将路径 ID 设置为 0。如果物体没有相关路径,则不使用与路径相关的变量 S_Obj_o、LatO_o 和 HeadO_o。相反,输出 X_Obj_o、Y_O_o 和 Yaw_O_o 可以直接使用 VS 命令计算或从外部软件导入。
圈3:道路表面道路 ID,用于垂直定位和定向此屏幕上定义的对象(关键字 = ROAD_ID_OBJ)。
控制物体垂直位置和方向的另一种方法是将道路 ID 设置为 0。由于物体没有与道路表面相关联的情况,因此可以直接使用 VS 命令计算输出 Z_Obj_o、PitchOo 和 RollO_o,也可以从外部软件导入。
也可以从路面获取 Z_Obj_o,同时独立设置 PitchOo 和/或 RollO_o(使用参数 OPT_ROAD_PITCH 和/或 OPT_ROAD_ROLL)。
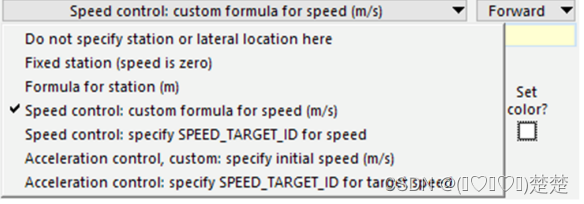
圈4:下拉列表包含七个选项,用于指定对象的运动,下方有一个可选的黄色字段,用于指定值或公式。
OPT_SPEED_OBJ 可以使用值 0、1 或 2 来应用。对于下拉列表中的前三个选项中的任何一个,它设置为 0,对于列表中的其他四个选项,它设置为 1 或 2。
以下是有关每个选项的更多信息。
Do not specify station or lateral location here. 如果选择此选项,则数据集中不会使用有关站点或横向偏移的信息。这通常在直接计算对象的 X 和 Y 坐标时完成。选择此选项后,圈8位置的黄色字段将被隐藏。
Fixed station (speed is zero).使用此选项,初始站点值在模拟过程中保持不变,并且下拉控件正下方的黄色字段将被隐藏。显示圈9位置的黄色字段,并使用命令 EQ_INIT 将值(可能是公式)写入 Parsfile。命令 OPT_SPEED_OBJ 为每个对象应用零。
Formula for station (m). 使用此选项,下拉控件下方的黄色字段用于站点公式,分配给每个对象的变量 S_Obj_o,并使用 EQ_IN 命令写入 Parsfile。圈9位置的黄色字段被隐藏,因为站点的显式公式也适用于初始条件。
Speed control: custom formula for speed (m/s). 使用此选项,下拉控件正下方的黄色字段用于速度公式。该公式分配给每个对象的变量 V_Obj_o,并写入 Parsfile 两次,一次使用 EQ_INIT 命令,一次使用 EQ_OUT 命令。显示圈9位置的黄色字段,并使用命令 EQ_INIT 将值(可能是公式)写入 Parsfile。
在所示示例中,公式只是输出变量 Vxz_Fwd(车辆前进速度)。也就是说,屏幕上指定的五个物体的速度将与自身车辆的速度相匹配。如果指定数值,请确保该值的 SI 单位为 m/s。请注意,1 m/s = 3.6 km/h 的速度转换。例如,您可以使用公式 20/3.6 指定 20 km/h 的速度。
Speed control: specify SPEED_TARGET_ID for speed. 使用此选项,黄色字段用于指定 SPEED_TARGET 函数数据集的 cusotm ID (SPEED_TARGET_ID)。该 ID 分配给每个对象的参数 SPEED_ID_OBJ。显示圈9位置的黄色字段,并使用命令 EQ_INIT 将值(可能是公式)写入 Parsfile。航向角圈7的黄色字段被隐藏(它将根据方向圈5,设置为 0 或 180°)。
Acceleration control, custom: specify initial speed (m/s). 使用此选项,下拉控件正下方的黄色字段用于指定初始速度,该速度通过命令 EQ_INIT 写入 Parsfile。显示圈9位置的黄色字段,并使用命令 EQ_INIT 将值(可能是公式)写入 Parsfile。设置加速度的方法不是使用内置控件设置的;预计会使用自定义 VS 命令来处理。
Acceleration control: specify SPEED_TARGET_ID for target speed. 此选项类似于 Speed control, forward, specify SPEED_TARGET_ID for speed关于显示哪些控件以及如何使用它们。与直接速度控制一样,控件下方的黄色字段再次用于为 SPEED_TARGET 数据集指定 SPEED_TARGET_ID。初始速度由 EQ_INIT 命令自动设置,该命令利用对象的当前时间和站点。当模拟运行时,SPEED_TARGET 函数用于计算目标速度,控制器提供加速度来调整速度。当目标速度发生变化时,此选项非常方便,例如当交通信号在红灯和绿灯之间变化时。
圈5:物体在速度或加速度控制下在路径上移动的方向(关键字 = OPT_DIR_OBJ)。向前(OPT_DIR_OBJ = 1)表示当速度为正时,车辆在所选路径上沿站点增加的方向行驶。向后(OPT_DIR_OBJ = -1)表示车辆沿站点减少的方向行驶。
圈6:可以使用公式或使用内置的 LTARG 可配置函数计算指定路径上每个对象的横向坐标 L (LatO_o)。使用下拉列表选择选项。
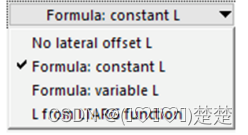
如果没有横向偏移,则黄色字段隐藏。如果选择使用常数 L 的公式,则 Parsfile 将使用 EQ_INIT VS 命令写入。如果选择使用变量 L 的公式,则公式将使用 EQ_IN 命令写入。
最后一个选项是使用 LTARG 可配置函数并指定数据集编号。如果选择了 LTARG 函数,则下拉控件下的黄色字段将设置参数 LTARG_ID_OBJ。与 LTARG 函数一起使用的数据集是其 LTARG_ID 值与 LTARG_ID_OBJ 的指定值匹配的数据集。
圈7:对象相对于目标路径的航向角有时可以用其中的一个来设置下拉控件中可用的选项(图5)。则不显示此控件运动控制圈4被设置为不指定这里的站点,或者使用SPEED_TARGET函数。
显示时,控件提供五个选项来指定相对航向角。
Do not specify heading. 如果选择此选项,每个移动物体的航向将保留默认值 0。
Heading is zero. 如果选择此选项,则使用 EQ_INIT 命令将初始航向设置为零。
Heading is 180 deg. 如果选择此选项,则使用 EQ_INIT 命令将初始航向设置为 π 弧度 (180°)。
Specify initial heading. 如果选择此选项,则下方会显示一个黄色字段,并写入 VS 命令 EQ_INIT,以将标题设置为字段中的数字或公式。如果这是一个数字,则必须以弧度为单位指定。(使用符号 PI 或 DR 将度数转换为弧度,其中 DR = 180/PI。例如,使用公式 20/DR 可获得 20° 的角度。)
Specify variable heading. 如果选择此选项,则下方会显示一个黄色字段,VS 命令 EQ_IN 将写入字段中的任何内容。这通常是一个公式,其值会在模拟过程中发生变化。
圈8:此数据集添加到模拟中的移动对象的数量。Parsfile 包含 VS 命令 DEFINE_MOVING_OBJECTS 以添加指定数量的对象。屏幕上显示的行数会调整以匹配此数字。
圈9:每个对象的初始站点。当使用下拉列表控件指定速度时,这些值将使用 EQ_INIT 命令应用于相应对象圈4。如果未使用站点(下拉列表控件中圈4的第一个选项)或使用明确公式指定站点(下拉列表控件中圈4的第三个选项),则字段将被隐藏。
圈10:车辆模型
如果链接库是 Animator: Vehicles and Sensor Targets,则车辆的数据集可能包括对刹车灯的支持。如果满足以下条件,交通车辆将在模拟中刹车时显示刹车灯:1. Animator: Vehicles and Sensor Targets数据集包含发光刹车灯的动画形状,并且 2. 此屏幕上对象的运动是用两个速度选项之一或两个加速度控制选项之一指定的在圈4里。
圈11:车辆颜色
















 716
716











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











