







欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。
最近看到一篇不错的四足英文综述,截取部分翻译后给大家分享,原文和链接见文末!!!
目录
|0.摘要
凭借其独特的与地面的点接触能力和对复杂地形的出色适应性,四足机器人已成为自动化和机器人工程领域的焦点。这些机器人在结构设计、运动规划、平衡控制等方面取得了重大研究进展。然而,当前研究的主要挑战在于进一步提高动态性能、环境适应性和有效载荷能力。本文全面讨论了四足机器人在结构设计、步态规划、传统控制策略、智能控制策略和自主运动等关键技术领域的研究成果。本文重点分析了上述领域的智能化和技术创新趋势,旨在为四足机器人研究提供有力的理论支撑和前瞻性的技术指导。此外,它还为从事该领域的学者提供了宝贵的参考。
|1.引言
移动机器人因其在复杂或危险的工作环境中替代人类的能力而受到越来越多的关注,包括核电站、反恐行动、战争和地下煤矿。通常,这些机器人可分为三种类型:轮式、履带式和腿式。[1]轮式和履带式机器人擅长在平坦的表面上平稳快速地移动,并且它们的控制系统相对简单。然而,在穿越松软或不平坦的地形时,它们的效率会显着降低,甚至可能变得无法移动。相比之下,具有离散立足点的腿部机器人表现出卓越的适应性,它们可以在复杂的地形中导航,包括障碍物、沼泽、沙漠和不平坦的表面,同时保持身体稳定性。
此外,四足机器人具有不受限制的横向运动的优势,使其能够实现全向运动。[2]这种能力在自然界中可以观察到,羚羊等动物在陡峭的悬崖上自由航行,猎豹在草原上高速冲刺,雪橇犬在雪地中毫不费力地移动。腿式机器人具有在自然越野条件下有效运行的潜力,因为它们对特定行走表面的要求较低。因此,学者们对有腿的机器人进行了广泛的研究。然而,仿生腿机器人的结构、移动速度、负载能力和环境适应性仍然落后于动物机器人。
对腿式机器人的研究主要集中在双足、四足和六足机器人上,对单足和八足机器人的关注相对较少。适当数量的支腿对于确保机器人的高效运动和稳定性能起着至关重要的作用。[3]与两足机器人相比,四足机器人表现出更强的承载能力和卓越的稳定性。此外,与六足机器人和八足机器人相比,四足机器人具有更简单的结构和控制系统,使其成为腿式机器人领域中必不可少的分支。四足机器人的躯干是一个浮动底座,它的腿独立于躯干运行。这种设计使机器人能够平稳地穿越复杂的地形,即使在承受负载时也是如此。[4]近年来,众多研究团队集中研究四足机器人的动态步态、运动稳定性、平衡能力和高负载特性,旨在提高其动态稳定性、运动速度和运输能力。[5]
四足机器人对各种复杂地形的适应性扩大了其在不同场景下的应用范围。在现有的轮式和履带式运输工具面临挑战的自然环境中,四足机器人在处理重载运输任务时表现出更大的灵活性和效率。波士顿动力公司的Big Dog是世界上第一个能够在野外行走和搬运重物的四足机器人,是这种应用的一个很好的例子。它可用于战场上的物资运输任务。[6]四足机器人表现出比人类更强大的运动能力,这使得它们在探索危险或难以到达的区域(例如地震灾区、狭窄管道和核电站检查地点)方面很有价值。[7]值得一提的是,宇树科技公司研发的四足机器人已在工厂生产基地、变电站和建筑行业中发挥了作用,成功完成了巡检任务。[8]在矿产勘探中,机器人可以在高温高压环境下协助工人并代替人类,确保人类安全。[9]此外,四足机器人在服务业中也有广泛的应用。随着经济的快速发展,这些机器人可以陪伴人类缓解孤独和焦虑。他们进行情感交流,带来快乐,并提高人们对精神需求的满意度。此外,无需担心宠物的出生、衰老、疾病或死亡。[10]
|2.四足机器人结构
四足机器人是仿生自动化的一种形式,经过精心设计,可以忠实地复制动物的行走模式,并熟练地在复杂的环境中导航。实现四足机器人运动的基本任务在于结构设计。精心构思的结构在增强机器人的稳定性、速度和敏捷性方面起着关键作用。目前,四足机器人的普遍结构变化包括仿生狗,[11]生物启发绵羊,[12]仿生大鼠,[13]仿生猫,[14]和仿生猎豹,[15]在其他例子中。四足机器人的基本结构通常包括身体、大腿、小腿和脚,如图 1 所示。四足机器人的特点是多自由度 (DoF),运动的动力源可分为液压驱动、电动驱动、气动驱动等。
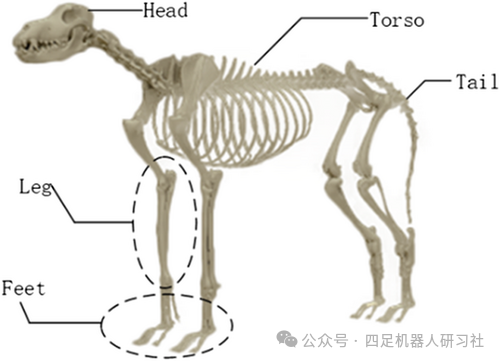
图1 四足机器人的结构。
|2.1驱动模式
|2.1.1液压驱动
液压驱动采用流体(通常是液压油)来传递能量,通过液压缸和阀门调节液体的流量和压力,以促进关节运动。液压系统的基本原理依赖于充满液体的密封管道,利用压差产生力和运动。控制液压驱动的机器人需要监督液体流量、压力、阀门操作,并根据反馈信息调整流体的流量和压力,以实现所需的运动。
液压驱动的四足机器人具有更高的功率密度,这使它们能够产生巨大的驱动力和扭矩。因此,四足机器人可以承受更重的负载并穿越更复杂的地形。具有代表性的液压驱动四足机器人包括Big Dog、LS3、[16]以及波士顿动力公司开发的Wild Cat,以及意大利理工学院(IIT)制造的HyQ系列电液混合动力驱动四足机器人。这些机器人的特性如表1所示。
表 1. 几种液压驱动四足机器人的特点
| 特点/型号 | 发展年 | 驱动器类型 | 特征 | 应用</ |
|---|
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6285
6285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









