






在运行pinocchio给出的示例Inverse kinematics(clik)时报错:
Traceback (most recent call last):
File "test.py", line 29, in <module>
q = pin.integrate(model)
Boost.Python.ArgumentError: Python argument types in
pinocchio.pinocchio_pywrap.integrate(Model)
did not match C++ signature:
integrate(pinocchio::ModelTpl<double, 0, pinocchio::JointCollectionDefaultTpl> model, Eigen::MatrixBase<Eigen::Matrix<double, -1, 1, 0, -1, 1> > q, Eigen::MatrixBase<Eigen::Matrix<double, -1, 1, 0, -1, 1> > v)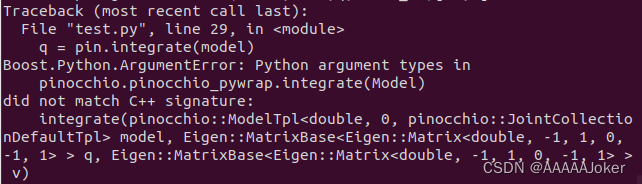
网上关于这个问题的解法大部分都是安装boost_python库 ,还有将std::换成boost::但是并没有解决,所以感觉不是环境问题,从代码入手查看,官网给出的示例代码如下:
from __future__ import print_function
import numpy as np
import pinocchio
model = pinocchio.buildSampleModelManipulator()
data = model.createData()
JOINT_ID = 6
xdes = np.matrix([ 0.5,-0.5,0.5]).T
q = pinocchio.neutral(model)
eps = 1e-4
IT_MAX = 1000
DT = 1e-1
i=0
while True:
pinocchio.forwardKinematics(model,data,q)
x = data.oMi[JOINT_ID].translation
R = data.oMi[JOINT_ID].rotation
err = R.T*(x-xdes)
if np.linalg.norm(err) < eps:
print("Convergence achieved!")
break
if i >= IT_MAX:
print("\nWarning: the iterative algorithm has not reached convergence to the desired precision")
break
J = pinocchio.jointJacobian(model,data,q,JOINT_ID)[:3,:]
v = - np.linalg.pinv(J)*err
q = pinocchio.integrate(model,q,v*DT)
if not i % 10: print('error = %s' % err.T)
i += 1
print('\nresult: %s' % q.flatten().tolist())
print('\nfinal error: %s' % err.T)看到报错的地方是integrate()函数,没有思绪就先将之前的元素输出。
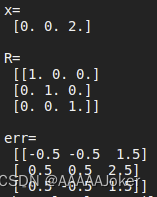
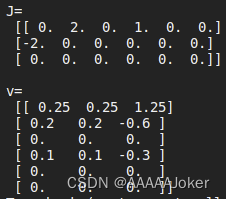
可以看到err和v的维度不对,err应该是一个3x1的矩阵,v应该是一个6x1的矩阵 ,可以看到R的维度是没有问题的,所以问题是x-xdes,输出看一下
明显不对,两个3x1的矩阵相减为什么会是一个3x3的矩阵。将相减部分用循环替换,发现还是报相同的错误,输出发现err还是3x3,乘法应该也有问题,将所有乘法换成点乘就可以运行了。修改代码如下:
from __future__ import print_function
import numpy as np
import pinocchio as pin
model = pin.buildSampleModelManipulator()
data = model.createData()
JOINT_ID = 6
xdes = np.matrix([ 0.5,-0.5,0.5]).T
q = pin.neutral(model)
eps = 1e-4
IT_MAX = 1000
DT = 1e-1
i=0
while True:
pin.forwardKinematics(model,data,q)
x = data.oMi[JOINT_ID].translation
R = data.oMi[JOINT_ID].rotation
ans=np.zeros((3,1))
for i in range(len(xdes)):
ans[i]=x[i]-xdes[i]
# print("ans=",ans)
err = np.dot(R.T,ans)
# print("\n err=",err)
if np.linalg.norm(err) < eps:
print("Convergence achieved!")
break
if i >= IT_MAX:
print("\nWarning: the iterative algorithm has not reached convergence to the desired precision")
break
J = pin.jointJacobian(model,data,q,JOINT_ID)[:3,:]
# print(J)
v = - np.dot(np.linalg.pinv(J),err)
# print(v)
# for i in range(len(q)):
# q[i] = q[i] + v[i]*DT
q=pin.integrate(model, q, v * DT)
if not i % 10: print('error = %s' % err.T)
i += 1
pin.forwardKinematics(model,data,q)
print(data.oMi[JOINT_ID].translation)
print('\nresult: %s' % q.flatten().tolist())
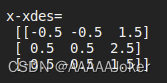
print('\nfinal error: %s' % err.T)运行结果如下:

代码用算出来的q重新计算了期望的x(即xdes),可以看出结果是正确的。
















 159
159











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









