







今日继续学习使用嘉立创购买的 立创梁山派天空星,芯片是 STM32F407VET6
因为已经有学习基础了,所以学习进度十分快,这次也是直接一块学习配置定时器与串口了,文章也愈来愈对基础的解释越来越少了......
文章提供测试代码讲解、完整工程下载、测试效果图
本文学习目标:
配置串口发送功能,自定义串口print函数、定时器计数计时中断功能,定时器每隔1000ms使用串口发送一次数据
目录
串口通信的配置:
我个人认为,基础的串口通信主要有以下几方面重要:
1、串口的初始化:打开外设总线、引脚配置、波特率配置、中断优先级配置
2、串口中断服务函数的编写
3、串口发送简单,但接收逻辑要写清除比较难
(通常定义结构体、状态机思维接收、处理错误数据丢包等......)
但今日主要还是只关注 配置使用串口的发送功能 即可......
串口初始化:
整个函数基本步骤简单来讲就是:
开总线、配引脚、设串口参数、开接收中断、配中断优先级......
下面是初始化串口1 PA9 (TX) 、PA10 (RX)的例程代码:
void uart1_init(uint32_t __Baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);//IO口用作串口引脚要配置复用模式
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//TX引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//IO口用作串口引脚要配置复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//RX引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;//定义配置串口的结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//开启串口1的时钟
USART_DeInit(USART1);//大概意思是解除此串口的其他配置
USART_StructInit(&USART_InitStructure);
USART_InitStructure.USART_BaudRate = __Baud;//设置波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字节长度为8bit
USART_InitStructure.USART_StopBits = USART_StopBits_1;//1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No ;//没有校验位
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//将串口配置为收发模式
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不提供流控
USART_Init(USART1,&USART_InitStructure);//将相关参数初始化给串口1
USART_ClearFlag(USART1,USART_FLAG_RXNE);//初始配置时清除接受置位
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//初始配置接受中断
USART_Cmd(USART1,ENABLE);//开启串口1
NVIC_InitTypeDef NVIC_InitStructure;//中断控制结构体变量定义
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道指定为USART1
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//主优先级为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//次优先级为1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//确定使能
NVIC_Init(&NVIC_InitStructure);//初始化配置此中断通道
}串口中断服务函数:
/******** 串口1 中断服务函数 ***********/
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET)//判断是不是真的有中断发生
{
//USART_SendData(USART1,USART_ReceiveData(USART1));//又将数据发回去(用于验证)
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //已经处理就清楚标志位
}
}
自定义串口打印函数:
这是个很有意思的自定义打印函数,可以让你的任意串口打印都能像用printf函数一样方便:
注意需要添加以下头文件:
#include "stdarg.h" //自定义printf需要使用
#include "stdio.h" //1.61328125kb
//选择串口发送数据--自定义Printf
void UsartPrintf (USART_TypeDef *USARTx, char *fmt,...)
{
unsigned char UsartPrintfBuf[296]; //最大长度296
va_list ap;
unsigned char *pStr = UsartPrintfBuf;
va_start(ap, fmt);
vsnprintf((char *)UsartPrintfBuf, sizeof(UsartPrintfBuf), fmt, ap); //格式化
va_end(ap);
while(*pStr != 0)
{
USART_SendData(USARTx, *pStr++);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);
}
}开发板硬件连接:
这里需要注意UART1的TX与RX引脚就在背面:不用处心积虑寻找PA9与PA10了哈:
注意与usb转串口模块连接时tx接rx,rx接tx就行了:

测试代码结果:
这里也是使用自己写的不靠谱串口助手上位机软件测试代码接收成功了:

定时器的计时功能配置:
个人总结定时器无非几个重要功能:计数计时、输出PWM、捕获脉冲计数
配置计时器的时候需要注意以下几点:
定时器接的时钟频率、定时器分频、最大重载值、计数模式、中断优先级
GD32F407VET6一共有14个定时器,可以分为五种类型,高级定时器0/7、通用定时器(L0)1-4、通用定时器(L1)8/11、通用定时器(L2)9/10/12/13和基本定时器5/6。不同类型的定时器所拥有的功能数量不同,一般高级定时器的功能最多,通用定时器次之,基本定时器功能最少。具体功能对照可以查看用户手册的第349页。
定时器初始化:
//接受两个整数参数:Period和Prescaler。Period是定时器的周期值,而Prescaler是预分频值。
void Timer_init(int Period,int Prescaler)
{
//定义了两个结构体变量,用于配置定时器和NVIC(嵌套向量中断控制器)
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//启用TIM3的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//时钟分频设置为1(即不分频)
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式设置为向上计数
TIM_TimeBaseStructure.TIM_Period = Period;//周期和预分频值分别设置为函数的参数值。
TIM_TimeBaseStructure.TIM_Prescaler = Prescaler;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);//使用TIM_TimeBaseInit函数将这些配置应用到TIM3上。
//启用了TIM3的更新中断。当定时器的计数值达到周期值时,会产生一个更新中断。
TIM_ITConfig(TIM3,TIM_IT_Update, ENABLE);
//配置了NVIC以处理TIM3的中断。设置了中断通道为TIM3_IRQn,启用了该中断,并设置了抢占优先级和子优先级。
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03;
NVIC_Init(&NVIC_InitStructure);
//启动了TIM3定时器
TIM_Cmd(TIM3,ENABLE);
}
定时器时钟来源:
这在数据手册18页:

可以看到14个定时器的时钟来源主要分为两部分,第一部分来源于CK_APB1,第二部分来源于CK_APB2。然后经过时钟配置寄存器(RCU_CFG1)决定是APB频率的2倍还是4倍,但这个频率不能超过AHB(max = 168MHZ)。
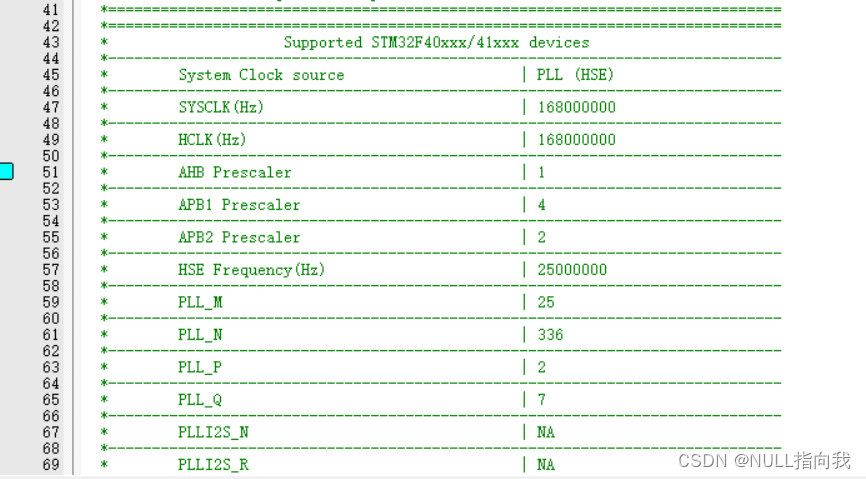
这里使用TIMER3,就要先使能TIMER5的时钟,又因为TIMER3时钟来源于CK_APB1,CK_APB1的时钟在system_stm32f4xx.c中定义
从图可以看到APB1的时钟等于AHB的时钟4分频,
AHB的时钟等于系统时钟SYSCLK 也就是168Mhz
那么APB1的时钟就是168/4=42Mhz
APB1的时钟再经过CK_APB1的2倍频传给定时器,即84Mhz
定时中断频率计算:
预分频器可以将定时器的时钟(TIMER_CK)频率按1到65536之间的任意值分频,分频后的时钟PSC_CLK驱动计数器计数。分频系数受预分频器TIMERx_PSC控制。这个控制寄存器带有缓冲器,它能够在运行时被改变。新的预分频器的参数在下一次更新事件到来时被采用。
分频器的分频公式为:PSC_CLK = TIMER_CK/ (TIMERx_PSC +1)
计数器溢出频率:
CK CNT_OV= CK CNT / (ARR+1)
= CK PSC / (PSC +1) / (ARR +1) 单位:Hz
由上文知CK PSC = 84Mhz
因此,为了达到1000ms溢出的速率,我们可以将period(即ARR)设为10000,将Prescaler(即PSC)设为8400

定时中断服务函数:

//定时器TIM3中断服务函数:
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) == SET)
{ // {}中为中断处理
i++;
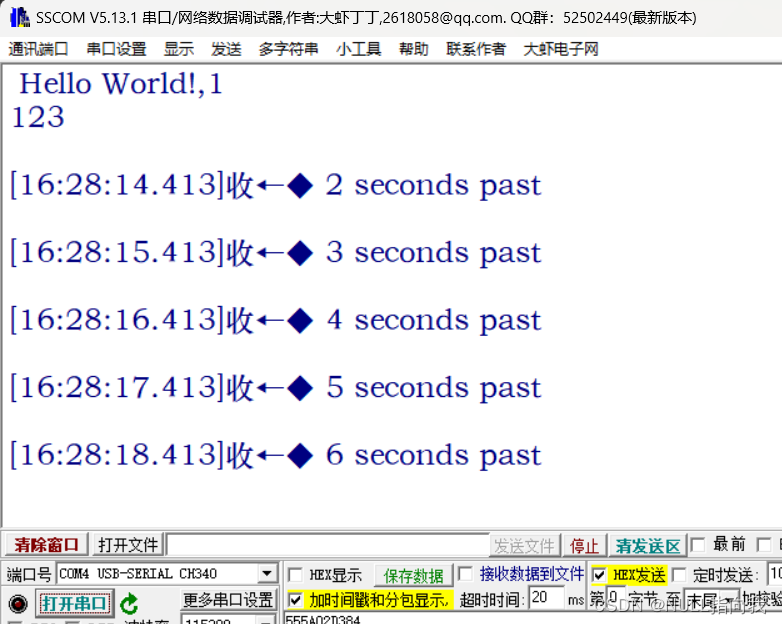
UsartPrintf(USART1," %d seconds past \r\n",i); //开机打印测试字符串
}
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
}
测试效果图:
测试工程下载:
勘误:
2024.5.18 工程代码注释勘误:
工程文件注释写错了,应该是1000ms,原本想写500ms的,但后面又改主意了,觉得写1000ms即1s的例子更好

















 2329
2329

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











