






✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🔥 内容介绍
自适应巡航控制(Adaptive Cruise Control, ACC)作为现代智能车辆系统中的重要组成部分,其核心目标在于在保证车辆行驶安全与舒适性的前提下,实现车辆速度的自动调节,以适应前方车辆的速度变化。然而,传统的ACC系统往往基于PID或其他线性控制方法,难以有效应对非线性、时变以及外部扰动等复杂工况,其控制性能在目标车辆加减速剧烈或交通流密集时容易下降。为了克服这些局限性,将模型预测控制(Model Predictive Control, MPC)引入ACC系统,构建基于MPC的自适应巡航控制项目,成为了提升ACC性能的关键方向。
一、项目背景与意义
随着汽车技术的飞速发展,车辆的智能化、网联化和自动化已成为不可逆转的趋势。自适应巡航控制作为实现车辆自动化驾驶 L1/L2 级别功能的核心之一,对于提升驾驶体验、缓解驾驶疲劳以及改善交通效率具有重要意义。然而,传统的ACC系统在实际应用中暴露出一些问题,例如:
- 鲁棒性不足:
面对复杂的交通环境,如前方车辆频繁变道、突然刹车等,传统ACC难以快速准确地做出反应,可能导致车辆过度加速或减速,影响行驶平顺性。
- 舒适性欠佳:
传统的ACC系统在速度调节过程中,容易出现明显的加减速冲击,影响乘客的乘坐舒适性。
- 对未来信息的利用不足:
传统ACC通常只考虑当前的车辆状态和前方目标车辆状态,缺乏对未来预测信息的有效利用,导致控制决策的优化程度有限。
引入MPC,则能够有效解决上述问题。MPC是一种基于模型预测的优化控制方法,其核心思想是通过建立系统的动态模型,预测系统在未来一段时间内的行为,并在此基础上,通过求解一个优化问题,确定当前时刻的最优控制输入。这种方法能够充分利用未来预测信息,并能够处理系统的约束条件,从而实现更优的控制性能。因此,开展基于MPC的自适应巡航控制项目,对于提升ACC系统的性能、推动智能驾驶技术的发展具有重要的理论和实践意义。
二、项目目标与关键技术
本项目的核心目标是设计和实现一个基于MPC的自适应巡航控制系统,该系统应具备以下特性:
- 高鲁棒性:
能够有效应对前方车辆的各种行驶行为,包括加减速、变道等。
- 高舒适性:
能够实现平稳的速度调节,减小加减速冲击。
- 优化的能源效率:
在满足安全和舒适性的前提下,尽量减少不必要的加减速,提高能源利用效率。
- 能够处理约束:
能够考虑车辆的物理约束,如加速度限制、刹车能力限制等。
为实现这些目标,本项目将重点研究以下关键技术:
- 车辆动力学模型建立:
精确的车辆动力学模型是MPC控制的基础。需要建立能够反映车辆纵向运动特性的模型,例如,考虑空气阻力、滚动阻力以及发动机/制动系统的响应特性等。模型的精度直接影响MPC的预测能力和控制效果。
- 目标车辆行为预测:
准确预测前方目标车辆未来的行驶轨迹和速度变化是MPC控制的关键。可以采用基于机器学习、数据驱动或动力学模型等方法进行预测。预测的准确性直接影响MPC的控制决策和安全性。
- MPC控制器设计:
根据建立的车辆动力学模型和目标车辆行为预测,设计MPC控制器。这包括确定预测时域、控制时域、目标函数以及约束条件等。目标函数通常包括跟踪误差、控制输入变化率、舒适性指标(如加速度变化率)等,以平衡性能、舒适性和安全性。约束条件则包括车辆速度、加速度、制动能力、车距等。
- 实时优化算法研究:
MPC控制需要实时求解一个在线优化问题。针对车辆控制的实时性要求,需要选择或设计高效的优化算法,例如,基于序列二次规划(SQP)、内点法或其他快速求解算法。
- 感知系统集成与数据融合:
基于MPC的ACC系统需要从车辆感知系统(如雷达、摄像头)获取前方目标车辆的位置、速度等信息。需要研究有效的数据融合方法,提高感知数据的准确性和可靠性。
- 系统集成与软件实现:
将上述各个模块进行集成,构建完整的基于MPC的自适应巡航控制系统,并进行软件实现。这包括代码的编写、调试和测试。
三、项目实施方案与技术路线
本项目将按照以下实施方案和技术路线逐步推进:
- 理论研究阶段:
-
深入研究MPC理论及其在车辆控制领域的应用。
-
学习和掌握车辆动力学建模方法。
-
研究目标车辆行为预测技术,例如基于卡尔曼滤波、机器学习等。
-
学习和掌握常用的在线优化算法。
-
- 模型建立与仿真阶段:
-
建立车辆纵向动力学模型,并在仿真环境中进行验证。
-
基于感知数据或预设场景,模拟目标车辆的行驶行为。
-
在仿真环境中搭建基于MPC的ACC控制回路,并进行初步的仿真测试,验证控制算法的有效性。
-
进行参数调优,优化MPC控制器的性能。
-
- 算法优化与代码实现阶段:
-
针对仿真过程中发现的问题,对MPC算法进行优化,例如改进目标函数、调整预测/控制时域、优化约束处理等。
-
选择或设计更高效的在线优化算法,以满足实时性要求。
-
将优化后的算法转化为可执行的软件代码,并进行单元测试和集成测试。
-
- 硬件在环(HIL)测试或实车测试阶段:
-
如果条件允许,搭建HIL测试平台,将控制算法部署到嵌入式控制器中,并通过仿真模型模拟车辆和环境,进行更接近实际情况的测试。
-
如果具备实车测试条件,则将控制系统集成到测试车辆中,在实际道路环境下进行测试,评估系统的性能和鲁棒性。
-
在项目的实施过程中,将充分利用现有的研究成果和开源工具,例如MATLAB/Simulink进行建模和仿真,以及各种优化求解器(如CVXOPT, CasADi)进行MPC优化问题的求解。同时,积极与相关领域的专家学者进行交流,获取宝贵的建议和指导。
四、项目挑战与风险
基于MPC的自适应巡航控制项目面临以下挑战和风险:
- 模型的精度与鲁棒性:
精确的车辆动力学模型难以获取,模型误差可能影响MPC的预测和控制效果。同时,实际交通环境复杂多变,模型难以完全捕捉所有非线性因素和外部扰动。
- 目标车辆行为预测的准确性:
前方车辆的行为具有不确定性,预测的准确性难以保证,预测误差可能导致控制决策的偏差。
- 在线优化的计算负担:
实时求解MPC优化问题需要大量的计算资源,对于车载嵌入式系统而言,计算能力有限可能成为瓶颈。
- 感知系统的可靠性:
感知系统获取的数据可能存在噪声、缺失或错误,影响MPC的控制输入。
- 系统集成与调试的复杂性:
将各个模块进行集成并进行调试需要耗费大量的时间和精力。
- 安全性验证的挑战:
智能驾驶系统的安全性至关重要,需要进行严格的测试和验证,以确保系统在各种工况下都能安全可靠地运行。
为应对这些挑战,本项目将采取以下应对措施:
- 采用更精确的建模方法和参数辨识技术,提高模型的精度。
- 研究更鲁棒的目标车辆行为预测算法,例如基于多种传感器融合和机器学习的方法。
- 采用高效的在线优化算法,并考虑模型的简化和优化问题的近似求解,降低计算负担。
- 加强感知数据融合和异常检测,提高感知数据的可靠性。
- 采用模块化设计和迭代开发的方法,降低系统集成和调试的复杂度。
- 进行充分的仿真、HIL测试和实车测试,并遵循相关的安全标准和法规,确保系统的安全性。
五、项目预期成果与推广应用
本项目预期将获得以下成果:
- 一套基于MPC的自适应巡航控制算法。
- 一套在仿真环境中验证的基于MPC的ACC系统模型。
- 一份详细的项目技术报告,记录研究过程、技术路线和实验结果。
- 如果条件允许,可能产出一个在HIL平台或实车上演示的ACC控制系统。
本项目取得的成果不仅具有理论研究价值,更具备广阔的推广应用前景。基于MPC的ACC系统可以作为下一代智能车辆的核心功能之一,应用于乘用车、商用车等领域,提升车辆的自动化水平和驾驶体验。同时,本项目积累的技术经验和算法成果,也可以为其他智能驾驶控制项目(如队列行驶、自动泊车等)提供借鉴和支持。
六、结论
基于MPC的自适应巡航控制项目是一个具有挑战性和重要意义的研究方向。通过深入研究车辆动力学建模、目标车辆行为预测、MPC控制器设计以及在线优化算法等关键技术,并结合充分的仿真和测试,本项目有望克服传统ACC系统的局限性,实现更鲁棒、更舒适、更高效的自适应巡航控制。项目的成功实施将为智能驾驶技术的发展注入新的活力,为构建更加安全、高效和绿色的未来交通系统做出贡献。尽管面临诸多挑战,但相信通过不懈的努力和深入的研究,本项目将取得预期的成果,并为智能驾驶的商业化落地提供重要的技术支撑。
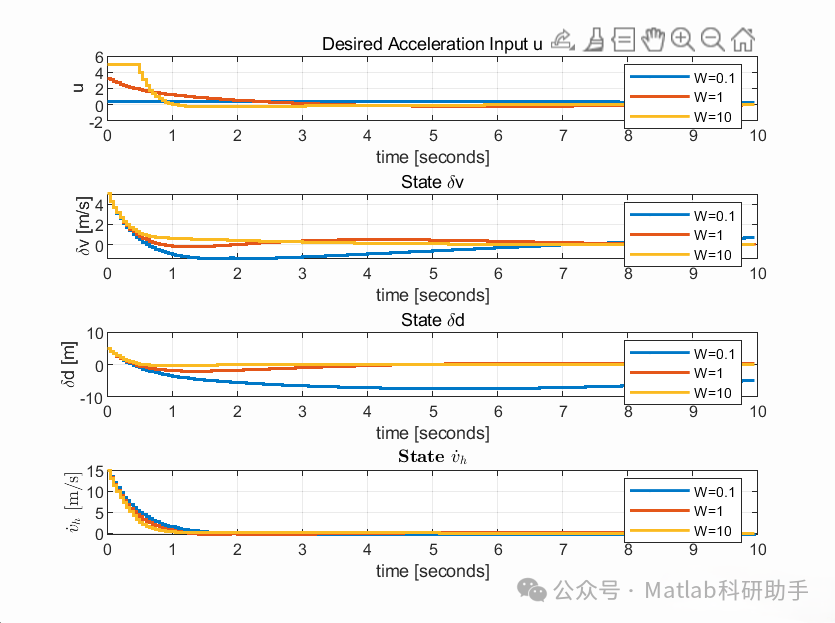
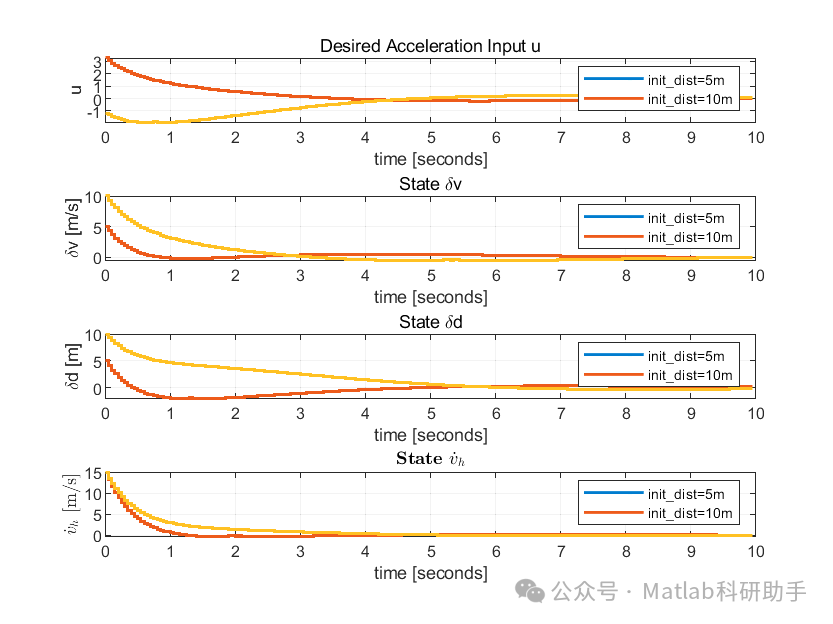
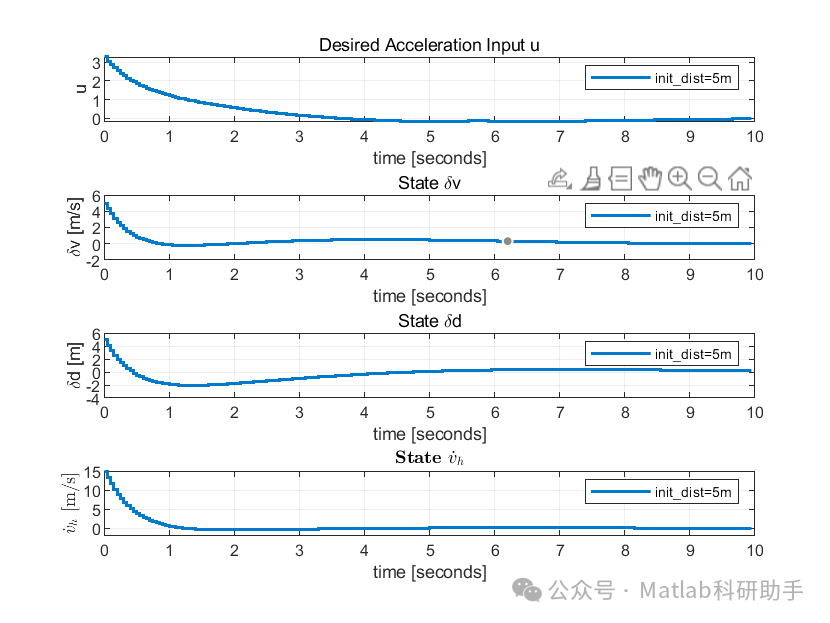
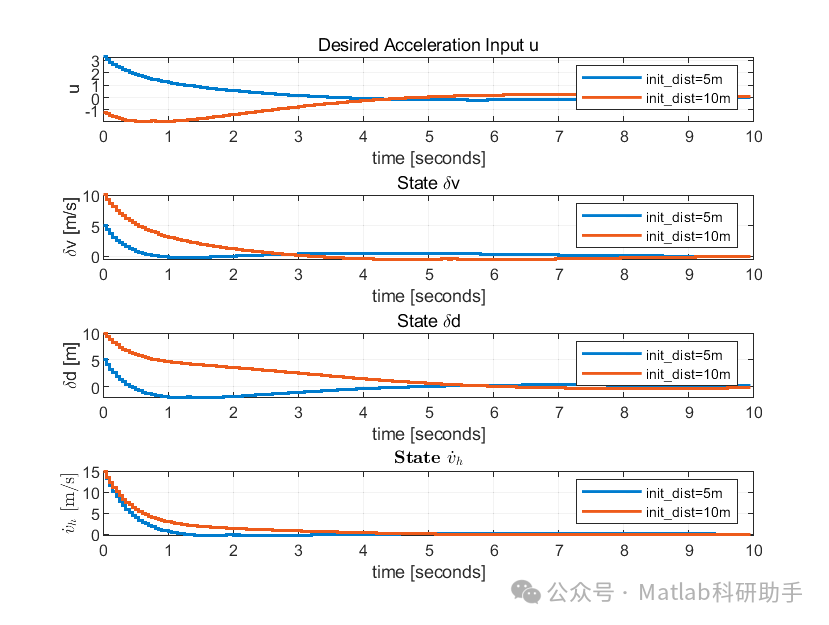
⛳️ 运行结果
🔗 参考文献
[1] 胡吉.基于MPC算法的混合动力汽车自适应巡航控制研究[D].重庆大学,2015.
[2] 黄菊花,邹汉鹏,刘明春.考虑测量噪声的车辆自适应巡航控制系统纵向跟车研究[J].北京理工大学学报, 2020, 40(3):8.DOI:10.15918/j.tbit1001-0645.2018.410.
[3] 罗莉华,龚李龙,李平,等.考虑驾驶员行驶特性的双模式自适应巡航控制设计[C]//中国过程控制会议.2011.
📣 部分代码
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🏆团队擅长辅导定制多种科研领域MATLAB仿真,助力科研梦:
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
2.10 DBN深度置信网络时序、回归预测和分类
2.11 FNN模糊神经网络时序、回归预测
2.12 RF随机森林时序、回归预测和分类
2.13 BLS宽度学习时序、回归预测和分类
2.14 PNN脉冲神经网络分类
2.15 模糊小波神经网络预测和分类
2.16 时序、回归预测和分类
2.17 时序、回归预测预测和分类
2.18 XGBOOST集成学习时序、回归预测预测和分类
2.19 Transform各类组合时序、回归预测预测和分类
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌈图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
🌈 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻
🌈 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划
🌈 通信方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌈 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌈电力系统方面
微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电
🌈 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 金属腐蚀
🌈 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、SOC估计、阵列优化、NLOS识别
🌈 车间调度
零等待流水车间调度问题NWFSP 、 置换流水车间调度问题PFSP、 混合流水车间调度问题HFSP 、零空闲流水车间调度问题NIFSP、分布式置换流水车间调度问题 DPFSP、阻塞流水车间调度问题BFSP
👇

















 163
163

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









