






我的ros的环境是ubuntu20.4 noetic 用香橙派5pro做的
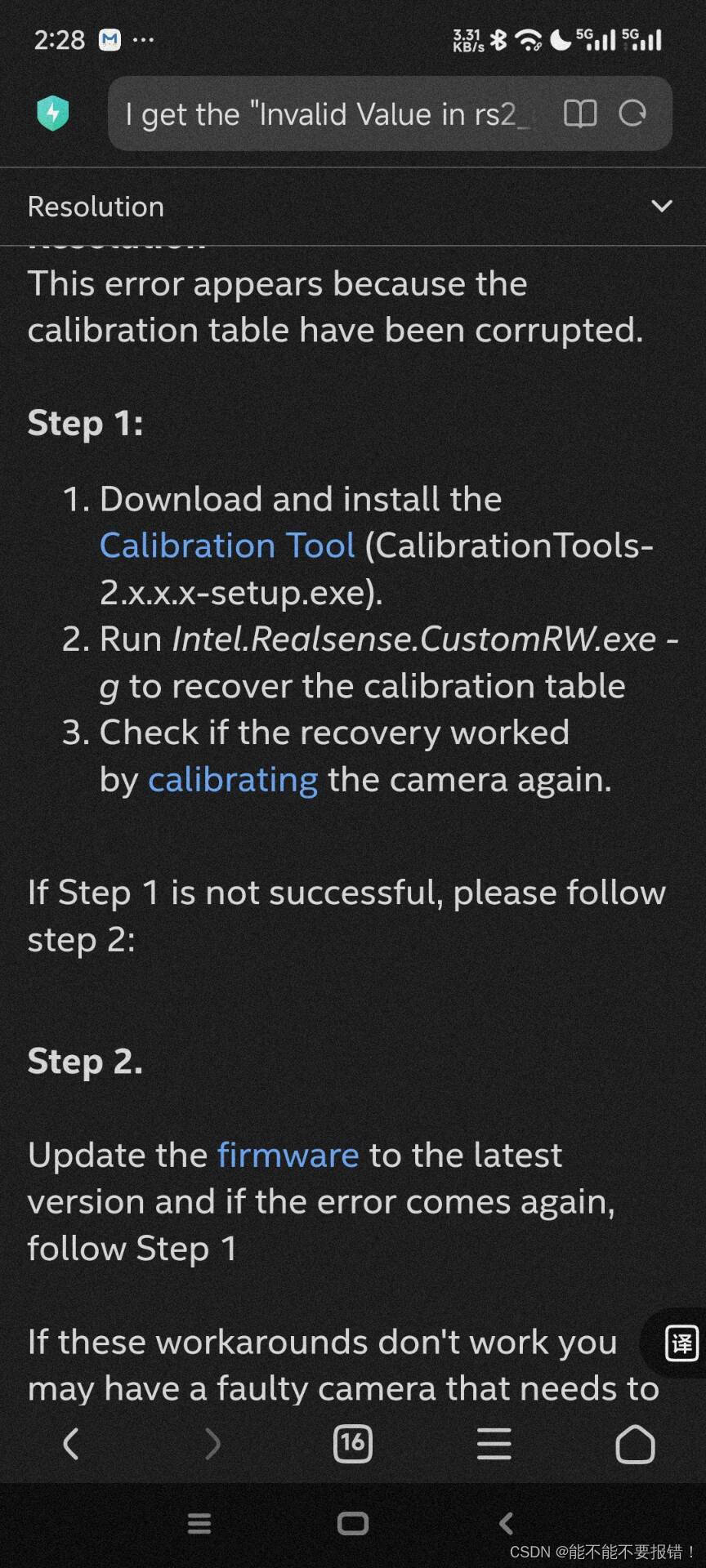
书接上回,更新librealsens到2.55后并未解决问题,仍然存在报错。一看终端提示当前的realsense-ros的包是基于2.50.0编译的,但是由于我使用的是ros noetic Releases · IntelRealSense/realsense-ros (github.com)
看了一下似乎ros1已经不维护了,都是ros2的,最新的ros1的包只有这个
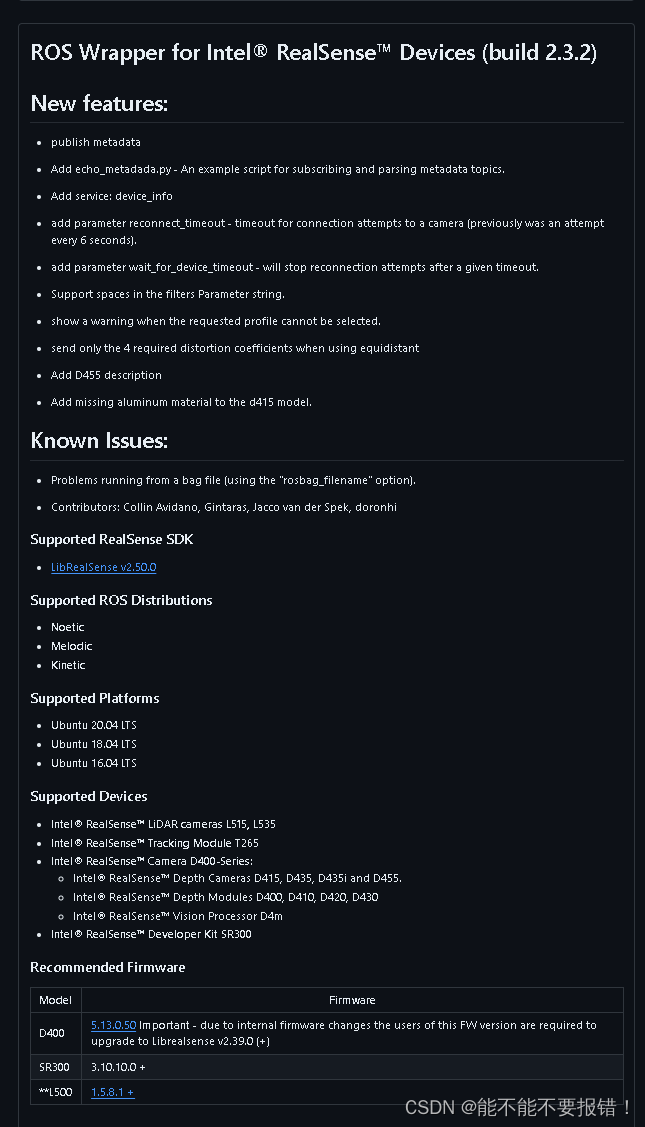
这里给出的信息还是蛮多的,可以看到这个功能包推荐的固件版本是5.13.0.50然后再看这个功能包支持的librealsens的版本是2.50.0。这个和我们昨天做的2.55.1的版本不一样!!!(但是那篇文章的做法任然适用于2.50.0的版本,所以我没有删掉那篇文章)
然而回头一看我的相机出厂的时候似乎刷了最新的固件,一查固件版本是5.16.0.1
好家伙,被背刺了。
然后就是要刷固件了,刷固件我看好几篇文章,都挺详细的,我这里归纳一下,就写我已经刷写成功的方法。(默认电脑已经装好了librealsense可以正常打开realsense viewer!!!这个不做教程了,很简单)
整个刷写过程时间应该不超过5分钟,可以开始倒计时了!
下载这个后运行。你会看到一个命令框一闪而过,别怕那是正常的,这个只做插件不是单独的软件。
然后进到这里Firmware releases D400 (intelrealsense.com)
下载我们前面提到的所需要版本的固件,这里我直接提供一个,需要的版本和我的一样都是5.13.0.50的可以直接下载https://www.intelrealsense.com/download/19295/?_ga=2.27953532.150928526.1715929502-1499867130.1715075374
然后就会得到一个压缩包,解压得到里面的.bin文件,放到能找到的地方。
打开realsense viewer (版本不要太低就行)
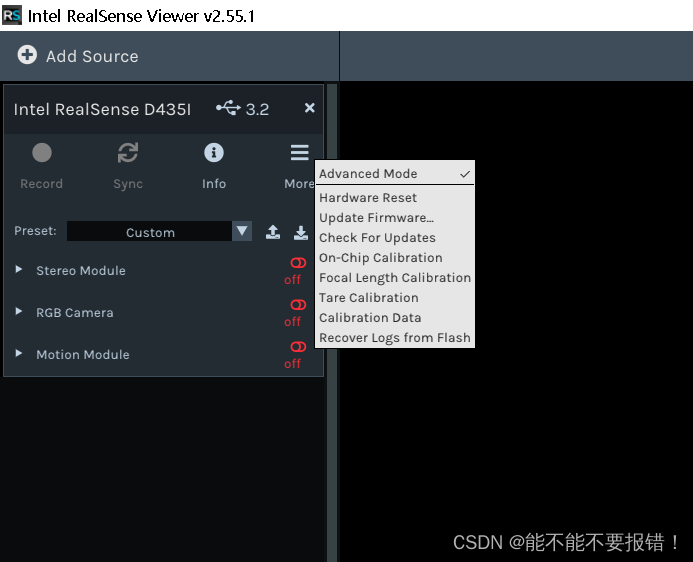
点开more,现在就会看到多出来一个update firmware
很好,点开选中刚才下载的固件文件,等待即可
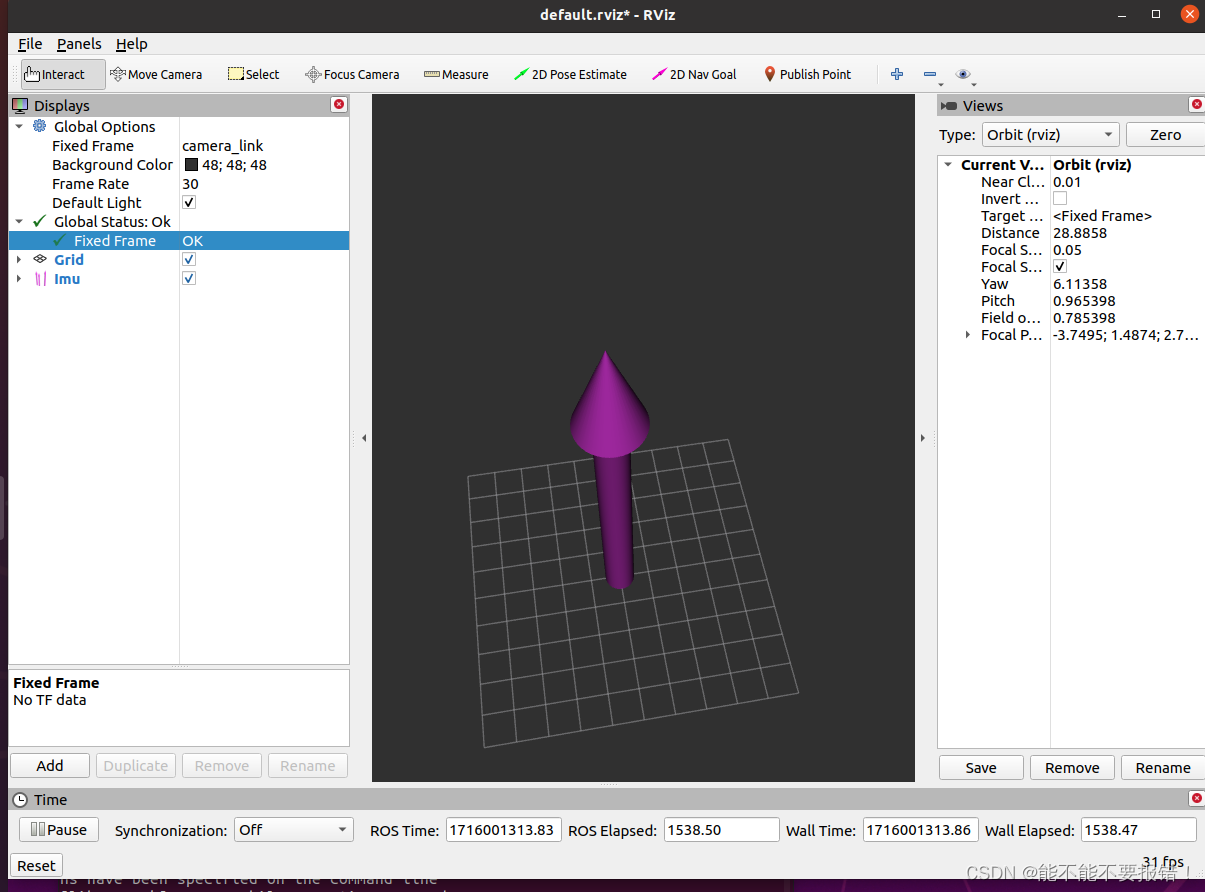
晒一张在realsens-ros上恢复了imu数据的图
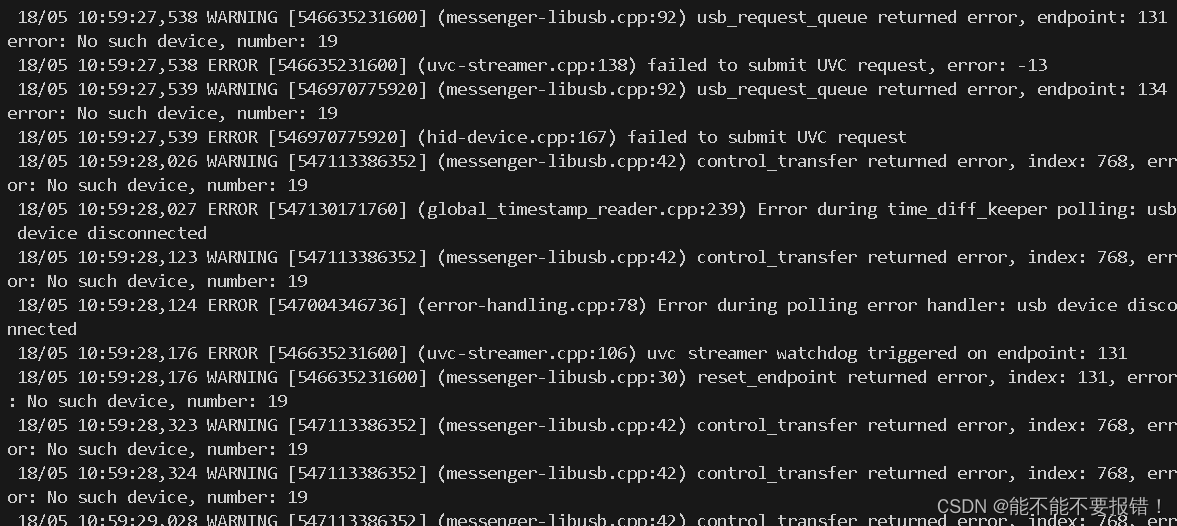
反正我总结的经验是有这些报错如果一段时间就会停止就不需要管他,如果一直在弹,那就有问题了。
除了这个我还看了一些别的文章说的
说的很有道理,但是我没有去尝试,因为我知道大概率就是固件的锅,有兴趣的可以去试一下。















 9471
9471











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









