






目录
一、了解串口协议和RS-232标准
1.串口协议
串口协议是一种用于在计算机和外部设备之间进行数据通信的协议。其中,RS-232是一种常用的串口通信标准,定义了用于串行通信的电气特性和信号传输规范。RS-232标准使用不同电平表示二进制数据,包括数据位、停止位和校验位等信息。
2.RS-232标准
RS-232标准定义了两个逻辑电平:逻辑1和逻辑0。在RS-232中,逻辑1通常由负电平表示,而逻辑0通常由正电平表示。RS-232标准使用负电平表示逻辑1是因为在通信线路中,负电平更容易受到干扰,因此可以更好地保持信号的稳定性。
3.RS232电平与TTL电平的区别
RS-232电平和TTL(Transistor-Transistor Logic,晶体管-晶体管逻辑)电平是两种不同的电平标准。RS-232电平用于串口通信,而TTL电平用于数字电路和逻辑电路中。
主要区别如下:
- 电压级别:RS-232电平通常采用正负电压,比如正电平范围为+3V到+15V,负电平范围为-15V到-3V。而TTL电平通常使用0V和5V作为电平表示。
- 电流:RS-232标准定义了较高的电流要求,以便在较长距离上进行可靠的通信。而TTL电平通常具有较低的电流要求。
- 信号传输距离:RS-232电平可以在较长的距离上进行通信,通常达到数十米甚至更远。而TTL电平在短距离内通信更为常见。
4.USB/TTL转RS-232模块(以CH340芯片模块为例)的工作原理
USB/TTL转RS-232模块是一种用于将USB接口转换为RS-232电平的设备,常用于连接计算机和串口设备之间的通信。以CH340芯片模块为例,它是一种常见的USB转串口芯片。
工作原理如下:
- USB通信:USB/TTL转RS-232模块通过USB接口与计算机连接,通过USB通信协议与计算机进行数据交换。
- 芯片转换:模块中的CH340芯片负责将USB信号转换为TTL电平信号。它将计算机通过USB接口发送的数据转换为TTL电平信号,并将其发送到模块的TTL串口引脚。
- RS-232转换:模块上的其他电路和芯片负责将TTL电平信号转换为RS-232电平信号。这通常涉及电平转换电路和驱动器,将TTL电平信号转换为符合RS-232标准的正负电平信号。
- 串口通信:通过RS-232电平信号,模块可以与外部串口设备进行通信,例如与串口打印机、串口终端或其他串口设备进行数据交换。
通过USB/TTL转RS-232模块,可以方便地将计算机与串口设备连接起来,实现数据的传输和通信。
二、配置CubeMX生成代码
1.新建工程
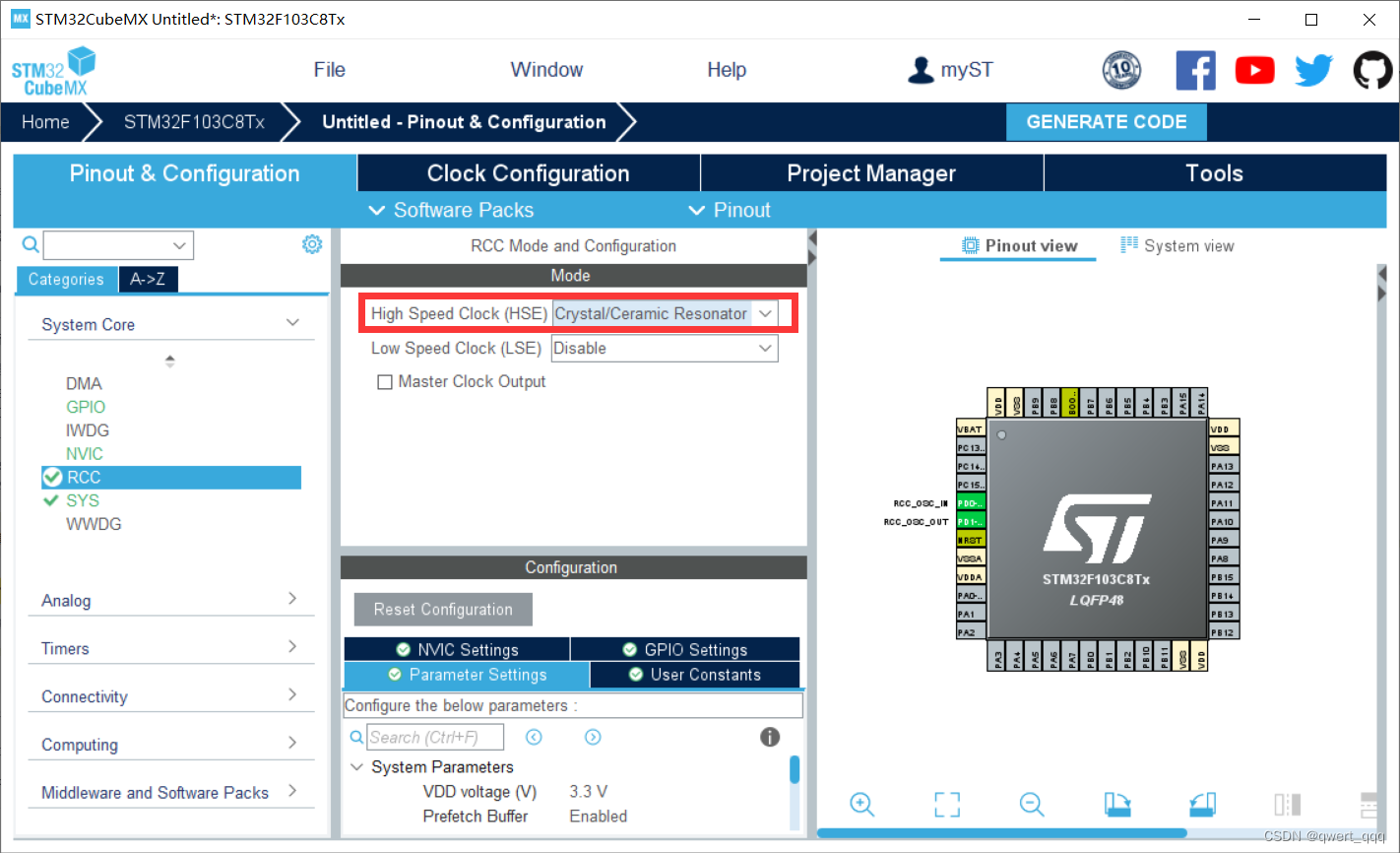
配置好RCC和SYS之后设置串口USART并生成代码。
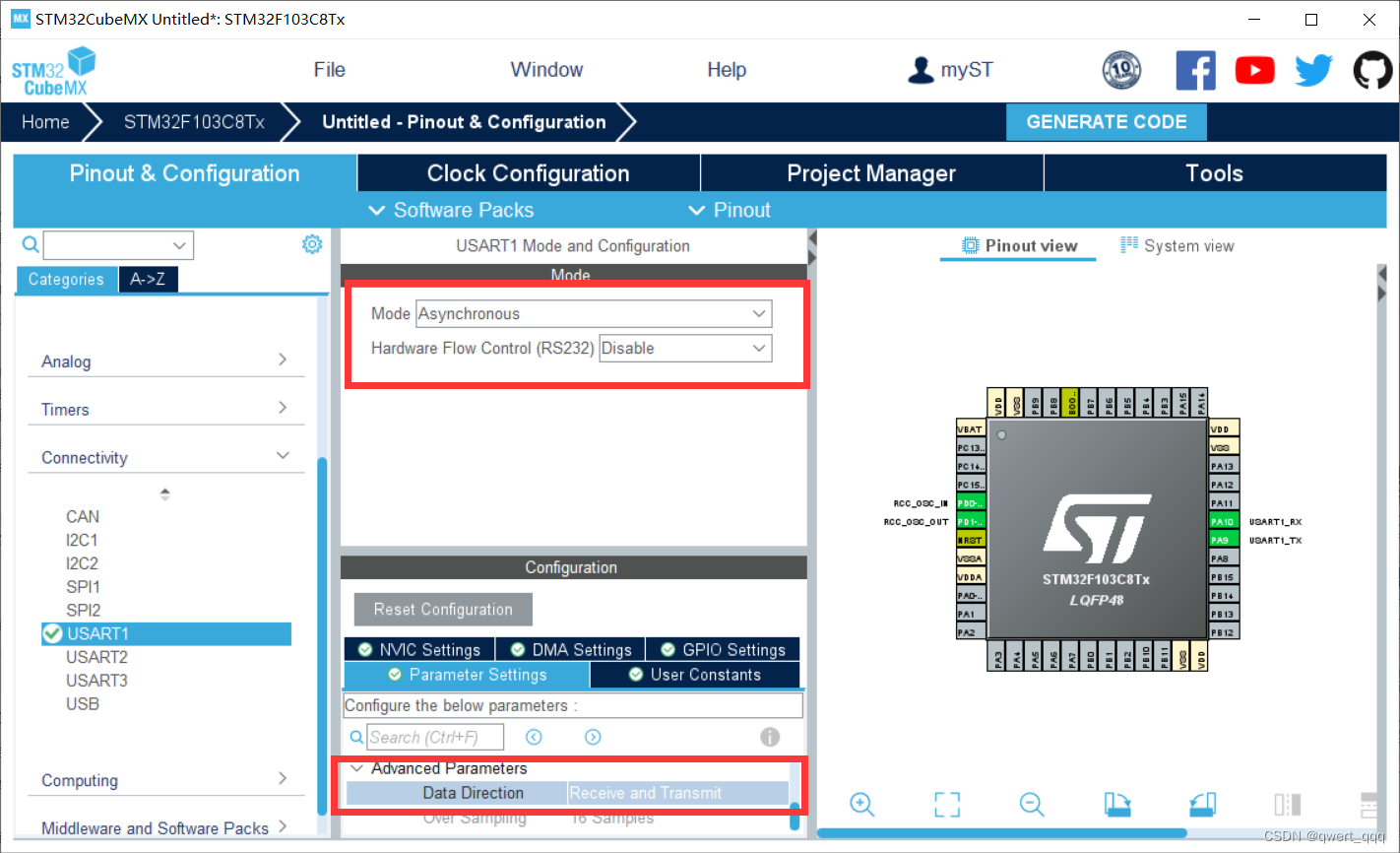
Connectivity(连接性):在"Connectivity"选项中,您可以配置引脚与其他外设的连接性。这包括配置引脚与串口(USART、UART)、SPI、I2C等通信接口的连接,以及与其他特定功能的连接,例如SD卡、LCD显示器等。通过配置连接性选项,您可以将特定的外设与引脚相关联,以实现所需的通信和功能。
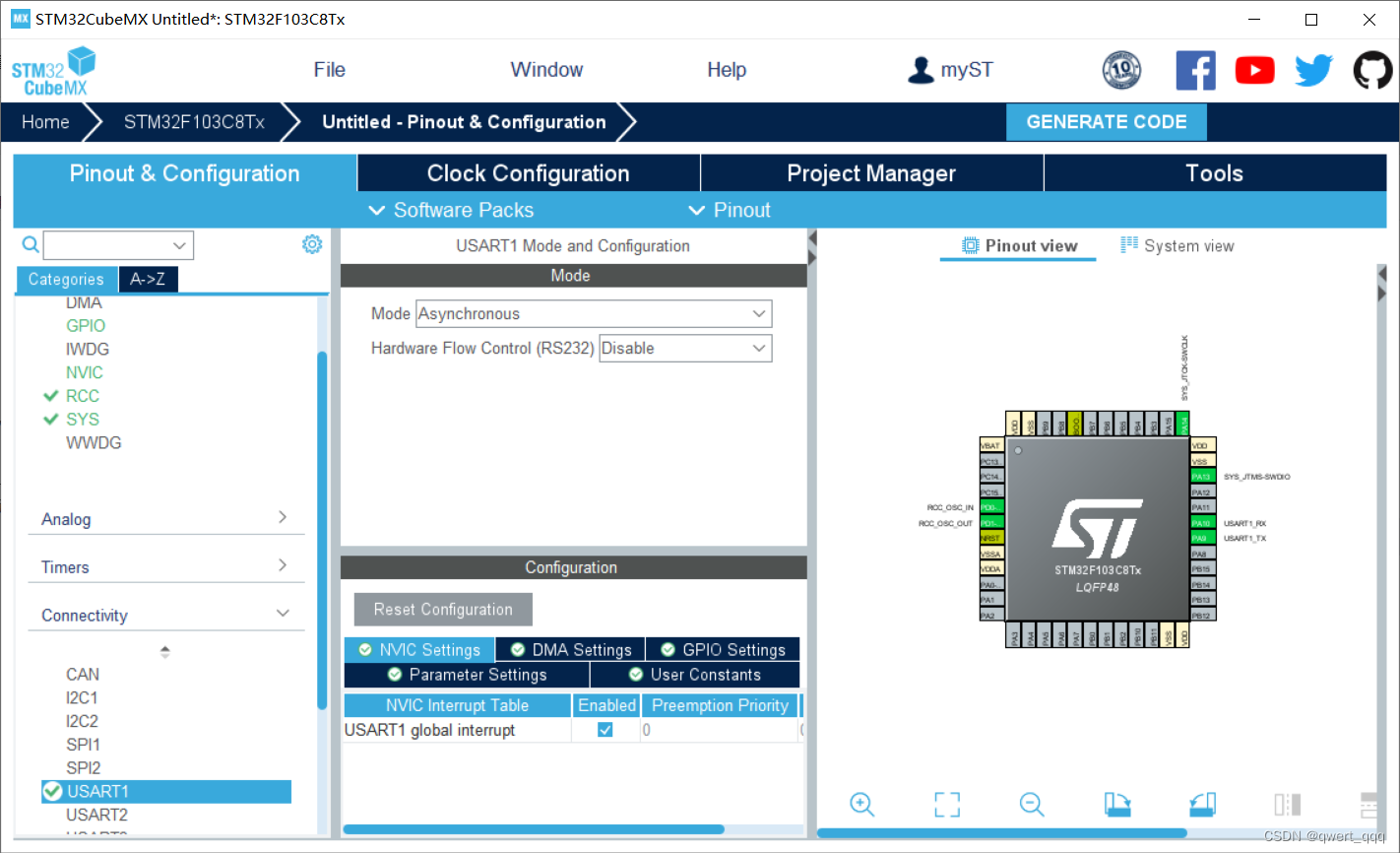
选择USART1进行传输,并将串口设置为异步工作模式,并开启USART1的全局中断有以下好处:
-
异步工作模式:异步工作模式是串口通信中最常用的模式之一。它允许以异步的方式传输数据,不需要发送和接收设备的时钟信号同步。这种模式下,数据帧的起始位和停止位用于标识每个数据字节的开始和结束。
-
USART1选择:选择USART1作为传输通道可以使您充分利用STM32微控制器的多个串口资源。如果您的应用程序需要多个串口通信通道,使用USART1可以保留其他USART通道供其他外设或通信需求使用。
-
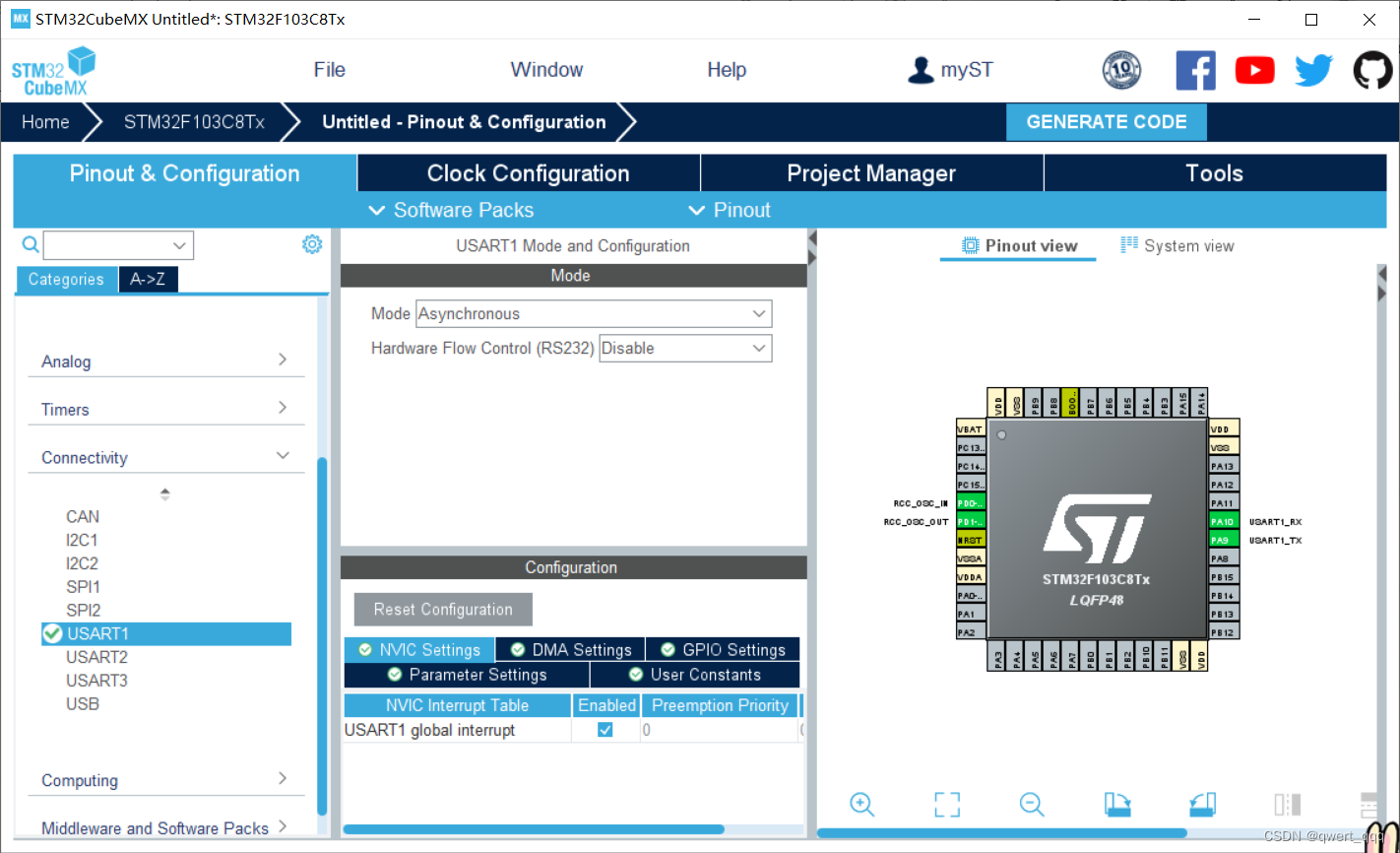
全局中断:开启USART1的全局中断使得在数据接收或传输完成时能够触发中断请求,并执行相应的中断服务程序。这样可以实现异步通信的同时,及时响应数据的到达或发送完成事件,提高系统的实时性能和效率。
-
多任务处理:通过开启串口的全局中断,您可以同时处理其他任务,而不需要持续轮询串口状态以检查数据的到达或发送状态。这样可以提高系统的并发性,允许您同时处理其他任务或事件,并减少了对CPU的占用。
-
简化编程:使用全局中断可以简化串口通信的编程。您只需编写中断服务程序来处理接收和发送中断,而不需要在主循环中不断轮询串口状态。这样可以使代码更加清晰和简洁,并提高代码的可维护性。
总结而言,选择USART1进行传输,并将串口设置为异步工作模式,并开启USART1的全局中断可以提供更灵活和高效的串口通信方式,同时提高系统的并发性和实时性能,简化编程过程,使代码更加优化和可维护。
2.编写代码
HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_int *data, uint16_t Size)
第一个参数指定一个串口进行通信
第二个参数里面是要发送的数据,通常是数组
第三个是发送的数据个数
将下面这段代码加入到main函数的while(1){}循环里实现持续向windows发送hello windows!频率为1秒1次。
uint8_t hello[20]="hello windows!\n";
HAL_UART_Transmit_IT(&huart1,hello,20);
HAL_Delay(1000);
串口调试助手结果如下:

三、扩展功能:
当上位机给stm32发送一个字符“#”后,stm32暂停发送“hello windows!”;发送一个字符“*”后,stm32继续发送;
在原先代码的基础上,
uint8_t flag='#';
将while(1)内改为以下代码
while (1)
{
//接收中断使能
HAL_UART_Receive_IT(&huart1,&flag,1);
if(flag == '*')//接收*
{
uint8_t hello[20]="hello windows! \n";
HAL_UART_Transmit_IT(&huart1,hello,20);
HAL_Delay(1000);
}
else if(flag == '#')//接收#
{
}
}
四、DMA中断
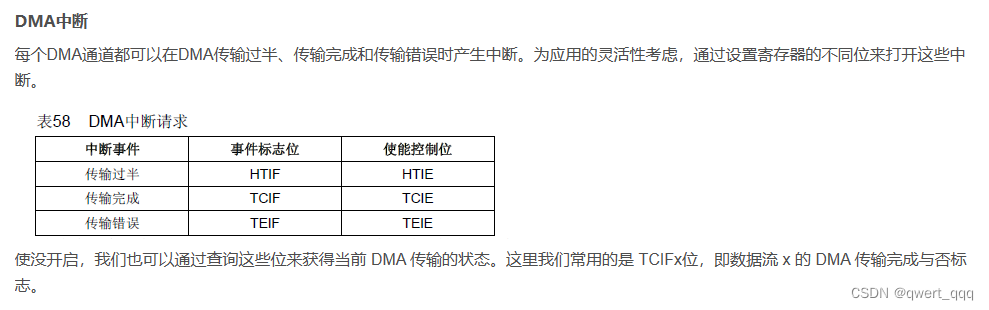
DMA库函数配置过程:
1、使能DMA时钟:RCC_AHBPeriphClockCmd();
2、初始化DMA通道:DMA_Init();
//设置通道;传输地址;传输方向;传输数据的数目;传输数据宽度;传输模式;优先级;是否开启存储器到存储器。
3、使能外设DMA;
4、使能DMA通道传输;
5、查询DMA传输状态。
1. 创建工程
2.
- 点击USATR1
- 设置MODE为异步通信(Asynchronous)
- 基础参数:波特率为115200 Bits/s。传输数据长度为8 Bit。奇偶检验无,停止位1 接收和发送都使能
- GPIO引脚自动设置 USART1_RX/USART_TX
- NVIC Settings 一栏使能接收中断
根据DMA通道预览可以知道,我们用的USART1 的TX RX 分别对应DMA1 的通道4和通道5
点击DMASettings 点击 Add 添加通道
选择USART_RX USART_TX 传输速率设置为中速
DMA传输模式为正常模式
DMA内存地址自增,每次增加一个Byte(字节)

右侧点击System Core 点击DMA

4.时钟源设置
外部晶振为8MHz
- 选择外部时钟HSE 8MHz
- PLL锁相环倍频9倍
- 系统时钟来源选择为PLL
- 设置APB1分频器为 /2
- 使能CSS监视时钟
参考 【STM32】系统时钟RCC详解(超详细,超全面)

5.生成工程。
2.编写代码
1.了解HAL库UARTDMA函数库介绍
1、串口发送/接收函数
- HAL_UART_Transmit();串口发送数据,使用超时管理机制
- HAL_UART_Receive();串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT();串口中断模式发送
- HAL_UART_Receive_IT();串口中断模式接收
- HAL_UART_Transmit_DMA();串口DMA模式发送
- HAL_UART_Transmit_DMA();串口DMA模式接收
- HAL_UART_DMAPause() 暂停串口DMA
- HAL_UART_DMAResume(); 恢复串口DMA
- HAL_UART_DMAStop(); 结束串口DMA
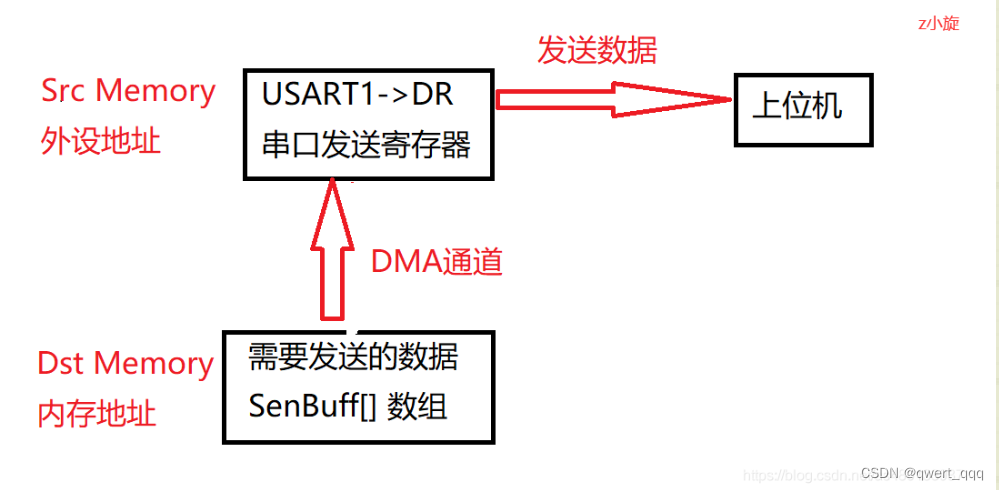
串口DMA发送数据:
HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
功能:串口通过DMA发送指定长度的数据。
参数:
- UART_HandleTypeDef *huart UATR的别名 如 : UART_HandleTypeDef huart1; 别名就是huart1
- *pData 需要发送的数据
- Size 发送的字节数
举例:
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)Senbuff, sizeof(Senbuff));//串口发送Senbuff数组
串口DMA接收数据:
HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
功能:串口通过DMA接受指定长度的数据。HAL_UART_Receive_DMA函数不能直接接收数组。该函数的第二个参数是指向接收数据缓冲区的指针,它需要传递一个指向数据缓冲区的指针,而不是数组本身。
参数:
- UART_HandleTypeDef *huart UATR的别名 如 : UART_HandleTypeDef huart1; 别名就是huart1
- *pData 需要存放接收数据的数组
- Size 接受的字节数
举例:
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)Recbuff, sizeof(Recbuff)); //串口发送Senbuff数组
串口DMA恢复函数:
HAL_UART_DMAResume(&huart1)
作用: 恢复DMA的传输
返回值: 0 正在恢复 1 完成DMA恢复
2.代码详情
该工程完成任务的逻辑是
- 调用
HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);串口DMA接收数据函数 - 接收一组数据并存入某个数组
- 然后我们再判断这个数组是start还是stop
- 完成对应的响应,start发送,stop停止
首先,在main.c中加入初始化代码
确保在其他源文件中使用变量时使用extern关键字进行声明,而不是重复定义。
extern UART_HandleTypeDef huart1;
/*定义了一个名为huart1的UART_HandleTypeDef类型变量,
用于配置和管理USART1串口的参数和状态。*/
extern DMA_HandleTypeDef hdma_usart1_rx;
/*定义了一个名为hdma_usart1_rx的DMA_HandleTypeDef类型变量,
用于配置和管理USART1串口的接收DMA通道的参数和状态。*/
extern DMA_HandleTypeDef hdma_usart1_tx;
/*定义了一个名为hdma_usart1_tx的DMA_HandleTypeDef类型变量,
用于配置和管理USART1串口的发送DMA通道的参数和状态。*/
void SystemClock_Config(void);//配置系统时钟
static void MX_GPIO_Init(void);//初始化GPIO
static void MX_DMA_Init(void);//初始化DMA
static void MX_USART1_UART_Init(void);//初始化USART1 UART
系统时钟自动配置好了,但另外几个都没有找到[\抓狂],所以手动添加了这几个初始化函数。
- 初始化USART1 UART
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
//设置huart1结构体中的Instance成员,指定要初始化的USART实例为USART1。
huart1.Init.BaudRate = 115200;
//设置波特率为115200,即通信速率为115200 bps。
huart1.Init.WordLength = UART_WORDLENGTH_8B;
//设置数据位长度为8位。
huart1.Init.StopBits = UART_STOPBITS_1;
//设置停止位为1位。
huart1.Init.Parity = UART_PARITY_NONE;
//设置不使用奇偶校验。
huart1.Init.Mode = UART_MODE_TX_RX;
//设置UART工作模式为同时支持发送和接收。
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
//设置不使用硬件流控制。
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
//设置过采样率为16。
if (HAL_UART_Init(&huart1) != HAL_OK)
//调用HAL库函数HAL_UART_Init进行USART1的初始化,如果初始化失败则调用Error_Handler()函数进行错误处理。
{
Error_Handler();
}
}
- 初始化DMA
static void MX_DMA_Init(void)
{
__HAL_RCC_DMA1_CLK_ENABLE();
//使能DMA1的时钟。
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 0, 0);
//设置DMA1通道4的中断优先级为0,其中第一个参数是中断号,第二个参数是抢占优先级,第三个参数是子优先级。
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
//使能DMA1通道4的中断。
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 0, 0);
//设置DMA1通道5的中断优先级为0。
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
//使能DMA1通道5的中断。
}
- 初始化GPIO
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOD_CLK_ENABLE();//使能GPIOD端口的时钟。
__HAL_RCC_GPIOA_CLK_ENABLE();//使能GPIOA端口的时钟。
}
根据前面的分析写出的完整代码
#include "main.h"
#include "dma.h"
#include "usart.h"
#include "gpio.h"
extern UART_HandleTypeDef huart1;
/*定义了一个名为huart1的UART_HandleTypeDef类型变量,
用于配置和管理USART1串口的参数和状态。*/
extern DMA_HandleTypeDef hdma_usart1_rx;
/*定义了一个名为hdma_usart1_rx的DMA_HandleTypeDef类型变量,
用于配置和管理USART1串口的接收DMA通道的参数和状态。*/
extern DMA_HandleTypeDef hdma_usart1_tx;
/*定义了一个名为hdma_usart1_tx的DMA_HandleTypeDef类型变量,
用于配置和管理USART1串口的发送DMA通道的参数和状态。*/
void SystemClock_Config(void);//配置系统时钟
static void MX_GPIO_Init(void);//初始化GPIO
static void MX_DMA_Init(void);//初始化DMA
static void MX_USART1_UART_Init(void);//初始化USART1 UART
/**
* @brief The application entry point.
* @retval int
*/
uint8_t flag=0;
uint8_t data[6];
uint8_t hello[20]="hello windows!\n";
uint8_t start[]="start";
uint8_t stop[]="stop";
int isCorrect(uint8_t* x,uint8_t* y, size_t yStrLen){
for (size_t i = 0; i < yStrLen; i++) {
if (x[i] != y[i]) {
return 0;
}
}
return 1;
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
HAL_UART_Receive_DMA(&huart1,data,6);//接收任意长度数据
while (1)
{
if(flag==1)//接收到start开始发送数组
{
HAL_UART_Transmit_DMA(&huart1,hello,20);
HAL_Delay(1000);
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为“start"时,发送提示并改变flag=1
if(isCorrect(data, start, 5)==1)
{
flag=1;
}
//当输入的指令为"stop"时,改变flag=0
if(isCorrect(data, stop, 4)==1)
{
flag=0;
}
HAL_UART_Receive_DMA(huart,data,6);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
//设置huart1结构体中的Instance成员,指定要初始化的USART实例为USART1。
huart1.Init.BaudRate = 115200;
//设置波特率为115200,即通信速率为115200 bps。
huart1.Init.WordLength = UART_WORDLENGTH_8B;
//设置数据位长度为8位。
huart1.Init.StopBits = UART_STOPBITS_1;
//设置停止位为1位。
huart1.Init.Parity = UART_PARITY_NONE;
//设置不使用奇偶校验。
huart1.Init.Mode = UART_MODE_TX_RX;
//设置UART工作模式为同时支持发送和接收。
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
//设置不使用硬件流控制。
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
//设置过采样率为16。
if (HAL_UART_Init(&huart1) != HAL_OK)
//调用HAL库函数HAL_UART_Init进行USART1的初始化,如果初始化失败则调用Error_Handler()函数进行错误处理。
{
Error_Handler();
}
}
static void MX_DMA_Init(void)
{
__HAL_RCC_DMA1_CLK_ENABLE();
//使能DMA1的时钟。
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 0, 0);
//设置DMA1通道4的中断优先级为0,其中第一个参数是中断号,第二个参数是抢占优先级,第三个参数是子优先级。
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
//使能DMA1通道4的中断。
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 0, 0);
//设置DMA1通道5的中断优先级为0。
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
//使能DMA1通道5的中断。
}
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOD_CLK_ENABLE();//使能GPIOD端口的时钟。
__HAL_RCC_GPIOA_CLK_ENABLE();//使能GPIOA端口的时钟。
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3.成果展示















 9892
9892











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









