







电机拖动的基本方程式,电机参数(含电机惯量选择方法)
一、电机拖动基本方程式
1.转矩方程
直线运动时有牛顿第二定律
F
=
m
a
F=ma
F=ma,其中
F
F
F是物体所受的力,
m
m
m是物体的质量,
a
a
a是物体的加速度。
旋转运动则有转矩方程
T
−
T
L
=
J
d
Ω
d
t
T-T_{L}=J\frac{d\Omega}{dt}
T−TL=JdtdΩ
其中
T
T
T是电机转矩减去自身空载损耗后的转矩,单位N.m。
J
J
J是负载转动惯量,
Ω
\Omega
Ω表示系统的传动轴转速,单位rad/s。其中,转速单位在工程中常用转/分,即r/min。因此对上式进行转换可得:
T
−
T
L
=
J
2
π
60
d
n
d
t
T-T_{L}=J\frac{2\pi }{60} \frac{dn}{dt}
T−TL=J602πdtdn
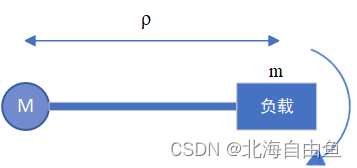
如果是应用在如下图所示的场合,则1
J
=
m
ρ
2
=
G
g
D
2
4
=
G
D
2
4
g
J=m\rho^2=\frac{G}{g}\frac{D^2}{4}=\frac{GD^2}{4g}
J=mρ2=gG4D2=4gGD2
上式中
G
G
G是负载的重力,
D
D
D是转动的直径。
2.转矩与负载转动惯量折算
现实当中,由于转矩匹配和转速匹配等原因,电机与负载之间往往连接有传动机构(如减速机)。此时,转矩和转动惯量都应该进行折算。

转矩折算
转矩的折算,应遵循折算前后功率不变,即
T
Ω
=
T
f
Ω
f
T
f
=
T
Ω
Ω
f
=
T
n
n
f
=
T
j
\begin{align*} T\Omega & = T_{f}\Omega_{f}\\ T_{f}&=\frac{T\Omega}{\Omega_f}=\frac{Tn}{n_f}=\frac{T}{j} \end{align*}
TΩTf=TfΩf=ΩfTΩ=nfTn=jT
其中
j
j
j为传动比
负载惯量折算
负载惯量的折算遵循折算前后转轴的动能不变
1
2
J
Ω
2
=
1
2
J
f
Ω
f
2
J
f
=
J
Ω
2
Ω
f
2
=
J
j
2
\begin{align*} \frac{1}{2}J\Omega^{2} & =\frac{1}{2}J_f\Omega^{2}_f & \\ J_{f}&=\frac{J\Omega^2}{\Omega_f^2}=\frac{J}{j^2} \end{align*}
21JΩ2Jf=21JfΩf2=Ωf2JΩ2=j2J
二、电机参数
从上面的电机拖动基本方程式可以看出电机的主要参数
1.额定转矩
电动机在额定电压、额定频率下长期工作的额定输出最大转矩(单位N.M),这个转矩应该根据上面的转矩方程进行计算得到,考虑电机和传动机构的效率后,进行裕量考虑。
2.额定转速
额定工况下的转速,应该综合传动机构的传动比进行综合选择。
3.额定功率
额定运行时,电机轴上的输出功率,可根据上面的两个参数进行计算,通常情况下可以用简单公式
P
=
T
Ω
=
2
π
60
T
n
=
T
n
9.55
(
W
)
P=T\Omega=\frac{2\pi}{60}Tn=\frac{Tn}{9.55}(W)
P=TΩ=602πTn=9.55Tn(W)
代码如下(示例):
4.电机惯量23
前面的几个参数比较直观且容易选择。电机惯量这个参数并不好选择。参考文献中的两篇文章解释了惯量比的概念。尤其是文章2做了理论上的分析,值得一看。简单来说,惯量比是负载惯量与电机惯量的之间比值,二者需要在合适的区间才能使电机带动负载正常运动。通常情况下,惯量比越低越好,但可能带来成本上的增加。可以参考电机厂家给出的惯量比建议,在10-15之间。

















 1809
1809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









