









 本文深入探讨ROS中的SLAM算法,重点介绍了RTABMAP的节点框图和局部占据栅格地图的生成流程。RTABMAP通过二维和三维光线追踪以及点云处理生成局部2D/3D地图,并能进行地面分割和障碍物检测。这些局部地图随后可以组装成全局地图,适应不同应用场景的需求。此外,文章还详细阐述了RTABMAP的参数设置及其处理占据栅格地图的流程,涉及点云回调、分割、滤波等多个步骤。
本文深入探讨ROS中的SLAM算法,重点介绍了RTABMAP的节点框图和局部占据栅格地图的生成流程。RTABMAP通过二维和三维光线追踪以及点云处理生成局部2D/3D地图,并能进行地面分割和障碍物检测。这些局部地图随后可以组装成全局地图,适应不同应用场景的需求。此外,文章还详细阐述了RTABMAP的参数设置及其处理占据栅格地图的流程,涉及点云回调、分割、滤波等多个步骤。
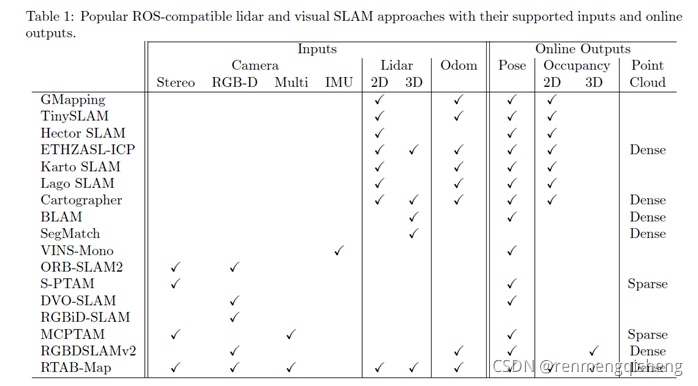
1、ROS中常见的SLAM算法汇总
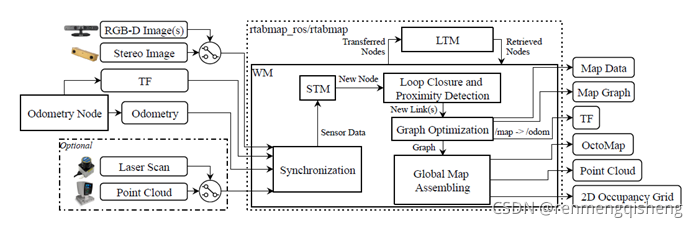
2、RTABMAP的ROS节点框图
3、局部占据栅格地图生成流程图
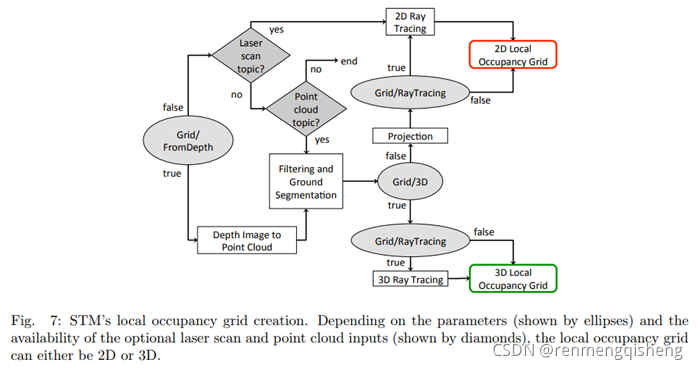
根据参数“Grid/FromDepth”、“Grid/3D”和输入topic设置,局部占据网格会以不同的方式生成,结果是2D或3D,如图所示。例如,如果参数“Grid/FromDepth”为false, 同时rtabmap节点订阅一个激光扫描主题,则创建一个局部2D占用网格。2D局部占用网格比3D网格需要更少的内存,因为需要节省的维度少了一个(例如z),而且叠加的障碍物可以减少到只有一个障碍物单元格。但是,局部2D占据网格不能用于生成3D全局占据网格,而局部3D占据网格可以用于生成2D和3D全局占据网格。这取决于应用程序需要什么样的全局地图以及可用的处理能力。请注意,如果\Grid/FromDepth“为false,并且没有订阅激光扫描和点云主题,则不会计算网格。图7中的矩形框描述如下:
- 二维光线追踪:对于激光射程内的每一条光线,都会在网格上画一条线,将传感器和被光线击中的障碍物之间的空白单元格全部填满。假设射线与地面平行。这种方法可以非常快速地生成2D局部占用网格,并且在2D-lidar映射中是默认的。
- 点云深度图像:将输入的深度图像(立体图像的视差图像)根据传感器帧和摄像机标定进行三维空间投影。然后在机器人基础帧中转换点云。
- 滤波和地面分割:点云由体素网格进行下采样,体素大小等于固定网格单元大小。然后从点云中分割出地平面:计算点云的法线,然后在固定的最大角度“\Grid/MaxGroundAngle”范围内,所有法线平行于z轴(向上)的点作为地面,其他点则为障碍物。
- 投影:如果\Grid/3D”为false,则三维地面和障碍物点云投影在地平面上(例如,x-y平面)。体素网格过滤器再次应用于合并在同一单元格中投影的点。二维光线跟踪可以用来消除障碍物和相机之间的空白。如果不使用二维光线跟踪,并且点云没有任何点分割为地面,则传感器和障碍物之间的占用栅格中不会设置空单元。
- 三维光线跟踪:从机器人参考中的单个局部占用栅格创建OctoMap。OctoMap进行3D光线跟踪,并检测相机和占用的单元格之间的空单元格。OctoMap被转换回具有空单元格、地面单元格和障碍单元格的局部占据网格格式。
4、全局地图集成
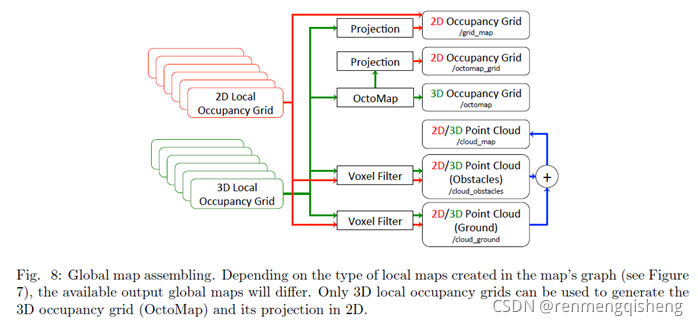
图8展示了可以从图7的局部占据网格中组装的全局地图输出。在节点中保存3D局部占用网格可以提供最大的灵活性,因为它们可以用来生成所有类型的地图。但是,如果只需要一个2D全局占用网格地图,那么在组装局部地图时,在节点中保存已经投影的局部网格可以节省内存(每个点两个数字,而不是三个)和时间(点已经投影到2D)。利用地图的图形,将每个局部占用网格转化为相应的姿态。当一个新的节点被添加到地图中时,新的局部占用网格与全局占用网格相结合,清除并添加障碍物。当循环闭合发生时,全局地图应根据地图中所有节点的所有新优化姿势重新组合。这一过程是必需的,以便在环路闭合之前被错误地清除的障碍物可以被重新包括在内。点云输出集合局部地图的所有点,并以标准传感器msgs/PointCloud2 14 ROS格式发布。体素网格过滤用于合并重叠曲面。生成的点云是一种方便的可视化和调试格式,并且易于与第三方应用程序集成。
5、RTABMAP的一些默认参数
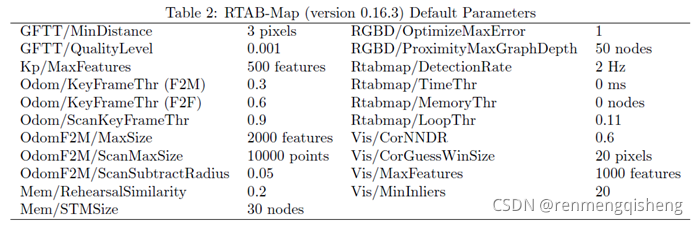
具体含义可以查看论文相应部分和代码文件Parameters.h
6、RTABMAP处理占据栅格地图流程
1)在obstacles_detection.cpp中处理点云回调callback函数,获取frame_ID到cloud_ID的变换关系localTransform,map_ID到frame_ID的变换关系pose,将cloud_ID中的点云转换到frame_ID中:
inputCloud = rtabmap::util3d::transformPointCloud(inputCloud, localTransform);
2)调用OccupancyGrid.hpp中segmentCloud函数实现地面和障碍物点云分割的功能:
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud = grid_.segmentCloud<pcl::PointXYZ>(
inputCloud,
pcl::IndicesPtr(new std::vector<int>),
pose,
cv::Point3f(localTransform.x(), localTransform.y(), localTransform.z()),
ground,
obstacles,
&flatObstacles);
3)先根据位姿pose(frame_ID机器人帧在map_ID地图帧坐标系中的位姿)将姿态分解成欧拉角rpy,仅使用roll和pitch对点云(frame_ID机器人帧中的坐标)进行坐标转换(projMapFrame为false,不使用位移相关信息,本质上还是在frame_ID机器人帧),然后调用util3d_mapping.hpp中segmentObstaclesFromGround函数来实现分割:
util3d::segmentObstaclesFromGround<PointT>(
cloud,
indices,
groundIndices,
obstaclesIndices,
normalKSearch_,
maxGroundAngle_,
clusterRadius_,
minClusterSize_,
flatObstaclesDetected_,
maxGroundHeight_,
flatObstacles,
Eigen::Vector4f(viewPoint.x, viewPoint.y, viewPoint.z+(projMapFrame_?pose.z():0), 1));
其中,viewPoint是cloud_ID(相机帧)在frame_ID(机器人帧)坐标系中的坐标。
4)调用util3d_filtering.cpp中normalFiltering函数分割地面:
pcl::IndicesPtr flatSurfaces = normalFiltering(
cloud,
indices,
groundNormalAngle,
Eigen::Vector4f(0,0,1,0),
normalKSearch,
viewPoint);
实际是调用normalFilteringImpl函数实现:
normalFilteringImplpcl::PointXYZ(cloud, indices, angleMax, normal, normalKSearch, viewpoint);
点云分割与地面检测:
OccupancyGrid.hpp – segmentCloud函数
- 对点云进行体素化与降采样。调用pcl的setLeafSize()实现。
• rtabmap: cloud_voxel_size: 0.05f, gridCellSize = 0.05f. ICP配准中没有启用voxel(parameters.h)- 根据当前位姿,将点云从相机坐标系转换至世界坐标系。
• 调用rtabmap的util3d::transformPointCloud()实现。- 机器人范围检测与环境高度检测
• 分别采用util3d::cropBox和util3d::passThrough方法实现,在util3d_filtering.cpp中。- 检测地面点云
• util3d::segmentObstaclesFromGround,来自util3d_mapping.hpp
• 使用util3d::normalFitering方法滤波获取地面点云,指标为点的法线与向量(0,0,1)的夹角大小,默认值为45°。首先,通过pcl::NormalEstimationOMP方法,使用KdTree作为搜索方法,并通过setViewPoint方法设置视角,根据公式计算点云所有点的法向量。通过pcl::getAngle3D获得点云每个点法向量与地面垂直向量的夹角。实现方法在util3d_filtering.cpp
• 提取聚类分离地面与平坦障碍物,方法为util3d::extractClusters,来自util3d_filtering.cpp。具体算法为pcl::EuclideanClusterExtraction- 对地面点云滤波,分离地面与非地面点云
通过地面与障碍物高度排除三维空间外点,采用passThrough直通滤波器方法滤波,从之前的步骤获取这两种点云的下标值。或者通过cropbox方法直接通过移动机器人footprint范围来排除三维空间外点。- 生成栅格地图
• util3d::occupancy2DFromGroundObstacles,来自util3d_mapping.cpp

















 1514
1514

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









