







ROS 读取Odometry里程计话题并保存绘图
Odometry消息
在做导航定位式,通常最后的定位信息通过nav_msgs/Odometry消息类型发布,再将消息可视化在Rviz上。这种消息类型提供了机器人的位置和速度的综合信息,包括线速度和角速度,通常与时间戳和参考坐标系一起发布。
首先看一下消息定义:
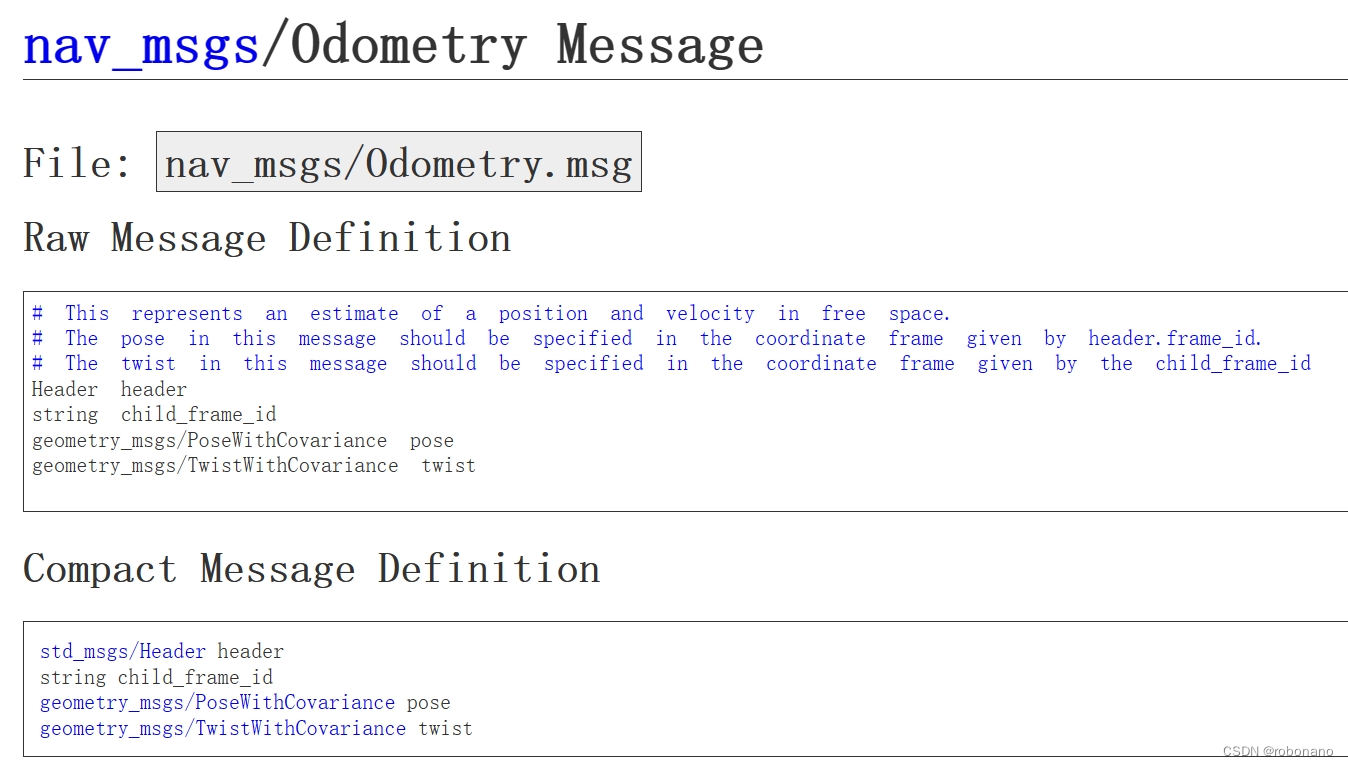
Header header:标准的消息头,包含时间戳和坐标系信息。
string child_frame_id:机器人的坐标系名称。
geometry_msgs/PoseWithCovariance pose:包含位置和方向的信息,以及这些信息的协方差。
geometry_msgs/TwistWithCovariance twist:包含线速度和角速度的信息,以及这些信息的协方差。
如何发布和订阅Odometry消息
发布Odometry消息的程序
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Point, Pose, Quaternion, Twist, Vector3
def publish_odometry():
rospy.init_node('odometry_publisher')
pub = rospy.Publisher('/odom', Odometry, queue_size=50)
rate = rospy.Rate(10) # 10 Hz
while not rospy.is_shutdown():
odom = Odometry()
odom.header.stamp = rospy.Time.now()
odom.header.frame_id = "odom"
odom.child_frame_id = "base_link"
# 填充位置信息
odom.pose.pose.position = Point(0.0, 0.0, 0.0)
odom.pose.pose.orientation = Quaternion(0.0, 0.0, 0.0, 1.0)
# 填充速度信息
odom.twist.twist.linear = Vector3( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 808
808

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









